介入手术机器人的制作方法
本申请涉及医疗器械领域,特别是涉及一种介入手术机器人。
背景技术:
1、经内镜逆行性胰胆管造影(endoscopic retrogradecholangiopancreatography,ercp)是治疗以胰胆管结石为主的胰胆道系统疾病的有效手段。该手术专业性强,操作难度大,术后并发症风险高,以介入手术机器人为代表的新兴技术中,应用于该手术领域的产品及技术较少。
2、ercp手术医生在进行导管插管时往往需要内窥镜、抬钳器和导管三者配合调向来实现导管的推进,存在导管插管困难以及导丝选择性进入胰管或胆管的插管困难的问题。插管困难的问题成为介入手术机器人亟待解决的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够解决导管与导丝插管难问题的介入手术机器人。
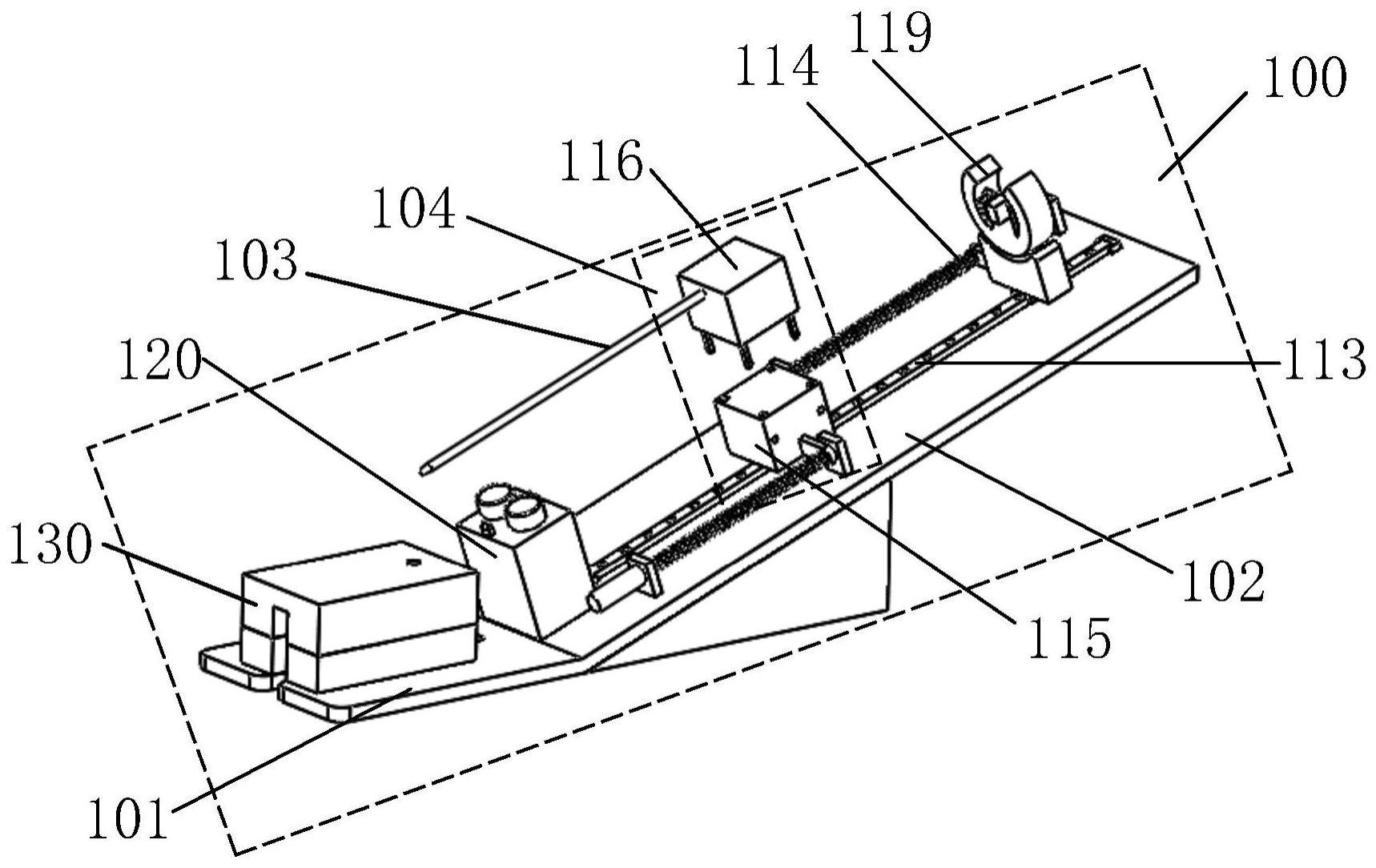
2、第一方面,本申请提供了一种介入手术机器人。介入手术机器人包括:递送控制部件,递送控制部件包括:
3、底板;
4、推送装置,推送装置设置于底板一侧;
5、细长件和控制机构,细长件的近端与控制机构连接,控制机构设置于推送装置一侧;
6、其中,推送装置用于带动控制机构移动,控制机构用于控制细长件的远端在目标对象的管腔中的弯曲和转向。
7、在其中一个实施例中,细长件的远端包括蛇骨结构和穿设于蛇骨结构中的若干控制丝,若干控制丝还和控制结构连接,控制机构控制若干控制丝改变蛇骨结构的弯曲和转向,以使得细长件的远端部分弯曲和转向。
8、在其中一个实施例中,细长件包括中空状的外层结构和内层结构,外层结构套设于内层结构外部,并与内层结构之间形成收纳腔,蛇骨结构位于收纳腔对应于细长件的远端的区域,若干控制丝自收纳腔向细长件的近端延伸并与控制机构传动连接。
9、在其中一个实施例中,内层结构包括中空腔和设置于中空腔中的分隔层,分隔层沿着细长件的轴向延伸,于径向方向上将中空腔分为相互独立的第一腔室和第二腔室。
10、在其中一个实施例中,推送装置包括直线滑轨和传动机构;
11、控制机构包括控制底座,控制底座与传动机构活动连接,传动机构驱动控制底座沿直线滑轨往复移动。
12、在其中一个实施例中,控制机构还包括上部驱动机构,上部驱动机构与若干控制丝传动连接,其中,上部驱动机构与控制底座可拆卸的电连接。
13、在其中一个实施例中,上部驱动机构包括:若干导向组件,每一导向组件包括依序设置的张紧轮和绕线轮,控制丝自细长件的近端伸出经张紧轮缠绕固定至绕线轮,其中,控制丝从细长件的近端沿着至张紧轮的部分与细长件的内层结构的表面之间的夹角位于0-15°之间。
14、在其中一个实施例中,介入手术机器人还包括:设置于直线滑轨近端的导丝递送机构和设置于直线滑轨远端的器械导管递送机构;
15、其中,导丝递送机构与传动机构活动连接,传动结构驱动导丝递送机构沿着滑轨往复移动,导丝递送机构还用于控制导丝于细长件的内管腔中移动至目标位置;
16、器械导管递送机构用于控制器械导管沿导丝移动至目标位置,执行与器械导管对应的器械操作。
17、在其中一个实施例中,介入手术机器人还包括:通讯连接的力检测机构和主操作端,力检测机构设置于控制机构以及导丝递送机构内,用于检测细长件和导丝在目标对象的管腔中移动时的阻力,阻力通过视觉反馈和/或触觉反馈发送至主操作端。
18、在其中一个实施例中,介入手术机器人还包括:手术操作端,手术操作端包括多自由度的机械臂,递送控制部件可拆卸的安装于机械臂的末端;以及
19、主操作端,主操作端和手术操作端通讯连接,主操作端包括若干控制部件,操作若干控制部件以产生操作指令,操作指令被发送至手术操作端,控制机械臂和递送控制部件执行关联的操作。
20、在其中一个实施例中,介入手术机器人还包括:视觉单元,视觉单元设置于底板的远端,用于采集目标对象的管腔中的视觉图像;
21、其中,视觉单元包括直视镜头和侧视镜头,经切换开关对直视镜头和侧视镜头进行切换,以采集不同视角的图像。
22、上述介入手术机器人,具有递送控制部件,递送控制部件包括底板、推送装置、细长件和控制机构。推送装置设置于底板一侧,细长件的近端与控制机构连接,控制机构设置于推送装置一侧,推送装置用于带动控制机构移动,控制机构用于控制细长件的远端在目标对象的管腔中的弯曲和转向。由于细长件的近端与控制机构连接,控制机构控制细长件的远端在目标对象的管腔中的弯曲和转向,有利于克服插管困难的问题,结构简单,可控性高。
技术特征:
1.一种介入手术机器人,其特征在于,所述介入手术机器人包括:递送控制部件,所述递送控制部件包括:
2.根据权利要求1所述的介入手术机器人,其特征在于,所述细长件的远端包括蛇骨结构和穿设于所述蛇骨结构中的若干控制丝,若干所述控制丝还和所述控制结构连接,所述控制机构控制若干所述控制丝改变所述蛇骨结构的弯曲和转向,以使得所述细长件的远端部分弯曲和转向。
3.根据权利要求2所述的介入手术机器人,其特征在于,所述细长件包括中空状的外层结构和内层结构,所述外层结构套设于所述内层结构外部,并与所述内层结构之间形成收纳腔,所述蛇骨结构位于所述收纳腔对应于所述细长件的远端的区域,所述若干控制丝自所述收纳腔向所述细长件的近端延伸并与所述控制机构传动连接。
4.根据权利要求3所述的介入手术机器人,其特征在于,所述内层结构包括中空腔和设置于所述中空腔中的分隔层,所述分隔层沿着所述细长件的轴向延伸,于径向方向上将所述中空腔分为相互独立的第一腔室和第二腔室。
5.根据权利要求2所述的介入手术机器人,其特征在于,所述推送装置包括直线滑轨和传动机构;
6.根据权利要求5所述的介入手术机器人,其特征在于,所述控制机构还包括上部驱动机构,所述上部驱动机构与所述若干控制丝传动连接,其中,所述上部驱动机构与所述控制底座可拆卸的电连接。
7.根据权利要求6所述的介入手术机器人,其特征在于,所述上部驱动机构包括:若干导向组件,每一导向组件包括依序设置的张紧轮和绕线轮,所述控制丝自所述细长件的近端伸出经所述张紧轮缠绕固定至所述绕线轮,其中,所述控制丝从所述细长件的近端沿着至所述张紧轮的部分与所述细长件的内层结构的表面之间的夹角位于0-15°之间。
8.根据权利要求5所述的介入手术机器人,其特征在于,还包括:设置于所述直线滑轨近端的导丝递送机构和设置于所述直线滑轨远端的器械导管递送机构;
9.根据权利要求8所述的介入手术机器人,其特征在于,还包括:通讯连接的力检测机构和主操作端,所述力检测机构设置于所述控制机构以及所述导丝递送机构内,用于检测所述细长件和所述导丝在目标对象的管腔中移动时的阻力,所述阻力通过视觉反馈和/或触觉反馈发送至所述主操作端。
10.根据权利要求1所述的介入手术机器人,其特征在于,还包括:手术操作端,所述手术操作端包括多自由度的机械臂,所述递送控制部件可拆卸的安装于所述机械臂的末端;以及
11.根据权利要求1所述的介入手术机器人,其特征在于,还包括:视觉单元,所述视觉单元设置于所述底板的远端,用于采集目标对象的管腔中的视觉图像;
技术总结
本申请涉及一种介入手术机器人。所述介入手术机器人包括:递送控制部件,递送控制部件:包括底板;推送装置,推送装置设置底板一侧;细长件和控制机构,细长件的近端与控制机构连接,控制机构设置于推送装置一侧;其中,推送装置用于带动控制机构移动,控制机构用于控制细长件的远端在目标对象的管腔中的弯曲和转向。采用该介入手术机器人能够解决导管插管困难的问题。
技术研发人员:请求不公布姓名
受保护的技术使用者:深圳微美机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!