一种新型的老人智能手环
本发明涉及智能养老的,具体地说是一种新型的老人智能手环。
背景技术:
1、现阶段,我国的老龄人口正在逐年增多。老年人普遍存在身体机能退化,容易摔倒。老人摔倒后,如果没能及时发现、及时救助,极有可能会因久卧导致体温过低、呼吸压迫、供氧不足等而造成老人死亡。此外,现在长期独居的空巢老人已越来越多。空巢老人由于长期缺乏关爱和陪伴,会产生心理失调等症状,称为家庭“空巢”综合症。传统的基于单模态数据的老人摔倒检测,获取的数据信息比较单一,误判或漏判现象时有发生。传统的基于阈值的老人摔倒检测,仅通过某个时刻点的数据来判断老人是否摔倒,没能反映老人摔倒的过程性特征,因而误判现象也时有发生。传统的不具备远程联动功能的老人智能手环,子女或社区医疗人员无法随时随地获取老人的日常健康检测数据,也无法随时随地为老人提供个性化的远程关爱与医疗服务。随着我国智慧健康养老理念的深入人心、老人智能技术运用能力的不断提升、智慧健康养老产品的不断丰富与升级,传统的基于单模态数据、基于阈值判断、缺乏远程联动功能的老人智能手环已不能满足新型的市场需求。
2、申请号为cn115581441a的发明公开了一种老人专用智能手环的控制方法,包括采集心率值、血流速度和位置信息,并根据心率和血流速度计算得到血压值;将所采集的心率值进行统计,得到心率变化图,并输出至终端;将计算得到的血压值进行统计,得到血压变化图,并输出至终端;判断心率值或血压值是否超过第一阈值,超过第一阈值时,发出危险警报信息;根据位置信息判断位置是否超过特定区域,超过特定区域时,发出警报信息。该手环的缺点是不具有老人摔倒自动检测功能。
3、申请号为cn108041772a的发明公开了一种老人摔倒检测智能手环及老人摔倒检测方法,包括运动传感器模块、心率模块以及用于根据运动传感器和心率传感器数据进行摔倒联合检测的处理器;所述处理器包括失重状态监测单元、碰撞状态监测单元、摔倒状态监测单元、告警发送单元和心跳监测单元;以及提供一种老人摔倒检测方法。该发明能够融合运动和心率等多模态数据自动检测老人是否摔倒并发出告警信号。但是该发明所用的是基于阈值的摔倒检测算法,缺乏对老人摔倒过程时序特征的提取与利用,容易误报和漏报。
4、申请号为cn112466090a的发明公开了一种智能救援手环,包括主控模块,用于数据的分析处理;人体生理监测模块,用于实时检测老人的体温与心率;定位模块,用于实时定位老人地理信息,并将位置存储在寄存器内,可实时读取位置信息;摔倒检测模块,通过在智能手表中内置多个传感器来获取体位信息,如加速度传感器、陀螺仪、压力传感器等,通过三级检测法从而最终对老人是否摔倒做出准确检测;报警模块,检测到相关生理数据出现异常,则通过开启蜂鸣器发出警报,以引起周围人群的注意;手机app远程通信模块,采用无线数据传输系统,通过数据包的形式,实时将检测数据与警报数据发送到手机终端。该手环的缺点是只用老人的体位信息进行摔倒检测,缺乏对老人所处环境的声音强度、老人心率等其他模态数据的融合,容易造成误报。
技术实现思路
1、为了解决上述的技术问题,本发明提出的一种新型的老人智能手环,利用加速度、角速度、心率、环境声音强度等多模态数据和基于多模态数据的老人摔倒检测算法,实现了更加精准的老人摔倒自动检测和及时呼救;利用无线通信技术,实现远程呼救,使得老人独居或独处时,摔倒也能被及时发现;利用心率、血氧、体温等生理传感器,实时采集老人的日常健康数据,并发送给子女和社区医疗人员,便于子女和社区医疗人员能够及时知晓老人的日常健康状况,随时随地为老人提供个性化的远程关爱与医疗服务,预防和缓解老人的“空巢”综合症。
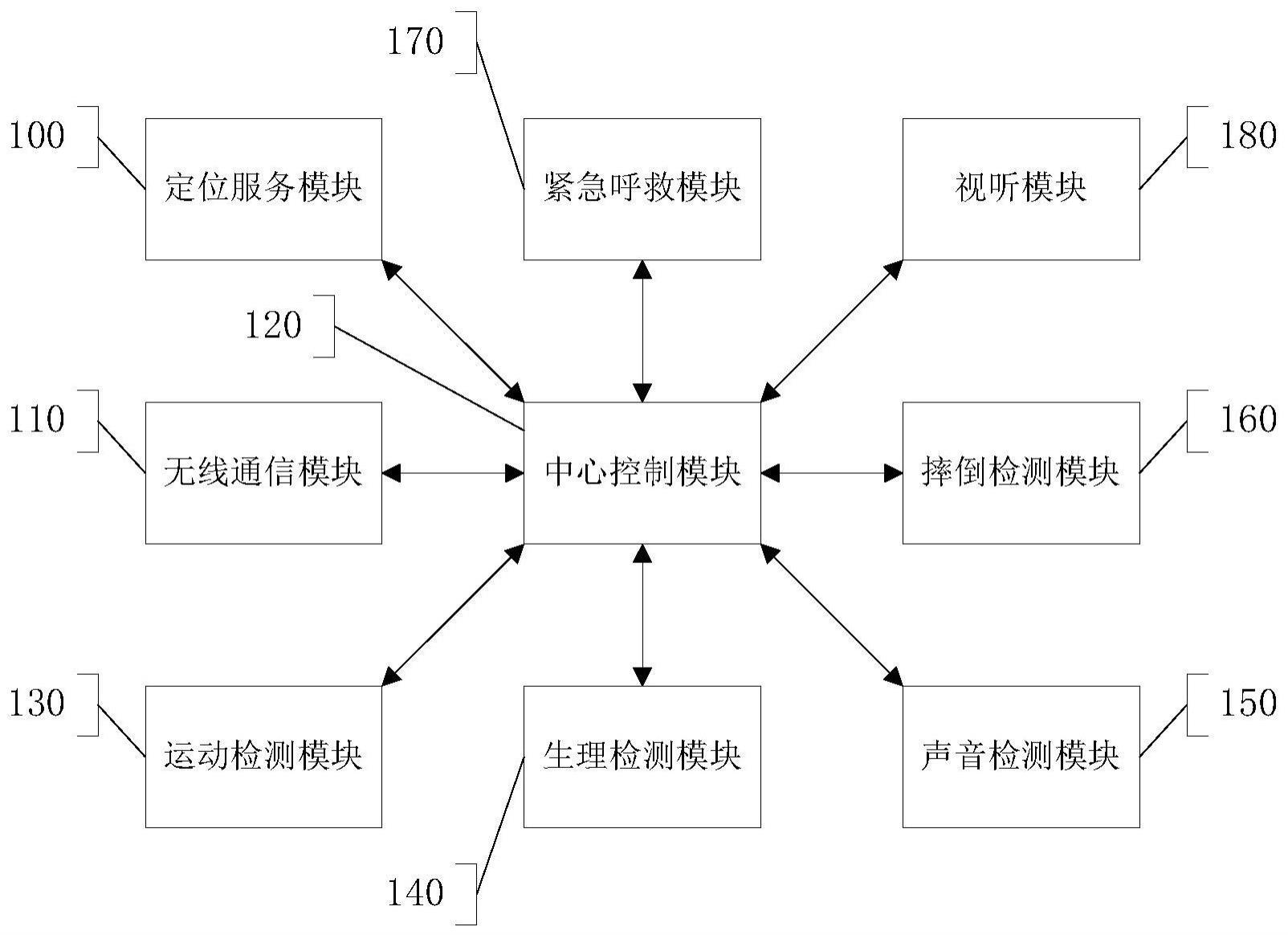
2、本发明的目的是提供一种新型的老人智能手环,包括定位服务模块、无线通信模块和中心控制模块,还包括以下模块:
3、运动检测模块、生理检测模块、声音检测模块、摔倒检测模块、紧急呼救模块和视听模块;
4、所述运动检测模块用于检测老人的三轴加速度和三轴角速度,并将检测结果传输给所述中心控制模块;
5、所述生理检测模块用于检测老人的心率、血氧和体温,并将检测结果传输给所述中心控制模块;
6、所述声音检测模块用于检测老人所处环境的声音强度,并将检测结果传输给中心控制模块;
7、所述摔倒检测模块用于依据所述运动检测模块、所述生理检测模块和所述声音检测模块采集的数据,运用基于多模态数据的老人摔倒检测方法判断老人是否摔倒;
8、所述视听模块用于呈现老人的运动信息、日常健康检测信息、远程关爱信息与个性化医疗服务信息。
9、优选的是,所述老人摔倒检测方法包括以下子步骤:
10、步骤1:基于隐马尔可夫模型的摔倒检测;
11、步骤2:基于阈值的心率异常检测;
12、步骤3:基于阈值的声音异常检测;
13、步骤4:基于步骤1至步骤3的检测结果,通过决策层融合得到最终的检测结果。
14、在上述任一方案中优选的是,所述步骤1包括以下子步骤:
15、步骤11:采用滑动时间窗口提取所述运动检测模块采集和传输过来的三轴加速度序列和三轴角速度序列作为训练阶段的训练样本;
16、步骤12:使用中值滤波器分别对所述三轴加速度序列和所述三轴角速度序列进行降噪处理;
17、步骤13:进行特征抽取和特征融合,得到用聚类中心表示的速度特征序列v;
18、步骤14:把所述训练样本中的每个速度特征序列v作为观测序列,用鲍姆-韦尔奇算法估算出hmm的参数λ=(π,a,b),其中,π表示初始状态概率向量,a表示状态转移矩阵,b表示观测概率矩阵;
19、步骤15:采用和训练阶段长度相同的滑动时间窗口提取运动检测模块采集和传输过来的老人三轴加速度序列和三轴角速度序列作为摔倒检测阶段的样本数据;
20、步骤16:采用所述步骤12和步骤13的方法对所述步骤15中的样本数据进行处理,得到待识别运动的速度特征序列vtest;
21、步骤17:将所述待识别运动的速度特征序列vtest作为观测序列,送入hmm模型,用前向后向算法计算得出该观测序列vtest在隐马尔可夫模型中出现的概率p(vtest|λ)。
22、在上述任一方案中优选的是,所述步骤12还包括消除因环境物体运动或传感器自身震动引发的噪声,得到降噪后的三轴加速度序列(a1,a2,…,at,…,aτ)和三轴角速度序列(w1,w2,…,wt,…,wτ),
23、其中,at=[αt,x,αt,y,αt,z]t,wt=[ωt,x,ωt,y,ωt,z]t,αt,x、αt,y和αt,z分别表示t时刻老人在x轴、y轴和z轴方向上的加速度,ωt,x、ωt,y和ωt,z分别表示t时刻老人在x轴、y轴和z轴方向上的角速度,t∈(1,τ),τ表示滑动时间窗口的长度。
24、在上述任一方案中优选的是,所述步骤13包括以下子步骤:
25、步骤131:分别计算出合加速度α′t和合角速度ω′t,得到合加速度序列(α′1,α′2,…,α′t,…,α′τ)和合角速度序列(ω′1,ω′2,…,ω′t,…,ω′τ);
26、步骤132:将对应时刻的合加速度和合角速度两两组合,形成二维特征向量序列(b1,b2,…,bt,…,bτ),其中,bt=[α′t,ω′t]t;
27、步骤133:将所述训练样本中的所有二维特征向量b进行k-means聚类,聚成l类,每个类别的聚类中心记为其中,表示第l个聚类中心在合加速度维度上的坐标,表示第l个聚类中心在合角速度维度上的坐标,l∈(1,l),l表示k-means聚类的类别数;
28、步骤134:判断训练样本中每个二维特征向量b所属的类别,生成用聚类中心表示的速度特征序列v=(v1,v2,…,vt,…,vτ),其中,vt∈c,c={c1,c2,…,cl,…,cl},表示第l个聚类的中心。
29、在上述任一方案中优选的是,所述合加速度α′t的计算公式为
30、
31、在上述任一方案中优选的是,所述合角速度ω′t的计算公式为
32、
33、在上述任一方案中优选的是,所述待识别运动的速度特征序列vtest的序列为其中,
34、在上述任一方案中优选的是,所述步骤2还包括当所述生理检测模块传输过来的老人心率数据不在设定的心率阈值范围之内时,则给出老人心率异常的判定,所述心率阈值的范围为60-100。
35、在上述任一方案中优选的是,所述步骤3还包括当所述声音检测模块传输过来的老人所处环境的声音强度数据高于设定的声音阈值时,则给出老人所处环境声音异常的判定。
36、在上述任一方案中优选的是,所述步骤4还包括将所述基于隐马尔可夫模型的摔倒检测、所述基于阈值的心率异常检测和所述基于阈值的声音异常检测的检测结果传输给所述中心控制模块中的决策层融合模块。
37、在上述任一方案中优选的是,所述步骤4还包括所述决策层融合模块对“老人未摔倒c0”和“老人摔倒c1”两种情况进行投票,得到最终的检测结果。
38、在上述任一方案中优选的是,所述投票方法为:
39、步骤41:初始化参数,c0=0,c1=0;
40、步骤42:判断概率p(vtest|λ)是否大于阈值,如果大于阈值,则c1=c1+d11;反之,则c0=c0+d10;
41、步骤43:判断心率是否异常,如果异常,则c1=c1+d21;反之,则c0=c0+d20;
42、步骤44:判断声音是否异常,如果异常,则c1=c1+d31,判定心率异常;反之,则c0=c0+d30;
43、步骤45:比较c0和c1的大小,如果c1<c0,得出老人未摔倒的最终检测结果;反之,得出老人摔倒的最终检测结果;
44、其中,d10、d20、d30、d11、d21和d31为投票的分值。
45、在上述任一方案中优选的是,所述定位服务模块能够随时随地检测老人的地理位置并将老人的位置信息发送给所述中心控制模块。
46、在上述任一方案中优选的是,当所述摔倒检测模块得出的最终检测结果是“老人摔倒”时,所述中心控制模块会立即将呼救信息和老人的地理位置信息发送给所述紧急呼救模块,并驱动所述紧急呼救模块发出现场呼救和远程呼救。
47、在上述任一方案中优选的是,当所述摔倒检测模块得出的最终检测结果是“老人摔倒”时,所述紧急呼救模块还将老人的呼救信息和地理位置信息通过所述无线通讯模块传送到子女手机app和社区健康管理平台上。
48、在上述任一方案中优选的是,当摔倒检测模块得出的最终检测结果是“老人摔倒”时,所述紧急呼救模块驱动所述视听模块,发出现场呼救声,并将老人的姓名、年龄、血型、基础疾病等有助于抢救治疗的基本信息通过视听模块呈现出来。
49、本发明提出了一种新型的老人智能手环,方便老人子女和社区医疗人员随时随地知晓老人的日常健康状况,进而为老人提供个性化的健康关爱和医疗服务。
50、hmm模型:hidden markov model,为隐马尔可夫模型。
- 还没有人留言评论。精彩留言会获得点赞!