基于压电陶瓷的可自动对焦FF-OCT皮下指纹采集系统及方法
本发明涉及全场光学相干层析成像,尤其涉及基于压电陶瓷的可自动对焦ff-oct皮下指纹采集系统及方法。
背景技术:
1、指纹识别在许多面向安全的应用中是不可或缺的,但是部署在现实生活中的传统指纹传感器缺乏从外表面窥视手指内部的能力。皮下信息可以提供与手指相关的生物特征。当外部表面指纹的质量受到影响时,也可以使用亚表面指纹。全场光学相干层析成像(ff-oct)是最有前途的手指皮下成像技术之一。
2、ff-oct主要用于需要高各向同性分辨率(<1μm)和/或快速en-face成像的应用。ff-oct中的c扫描速率仅受相机帧速率的限制,帧速率通常在百分之一赫兹或更高的范围内。因此,带有百万像素相机的ff-oct系统可以实现与使用兆赫fdml激光光源的oct系统相同的a扫描速率,但ff-oct系统成本只有其很小的一部分。此外,ff-oct系统中的针孔有助于抑制多次散射光,从而更有效地利用可用探测带宽进行弹道光探测。
3、ff-oct使用高数值孔径的物镜,以获得高横向分辨率图像,因此在显微成像中,每个物点与像点也形成了点对点的公焦关系。为了获得从表皮到皮下更高质量的图像,开始采集图象时准确的聚焦在手指表皮是十分必要的。又因为在层析过程中,只有相干门处的光才能与参考光发生产生干涉信号,手指皮下有一定的折射率,为了确保相干门与焦平面相匹配,焦平面也需要随着相干门的位置进行移动。对手指表皮下进行自动聚焦可以更容易的获得质量更高的图像。
技术实现思路
1、为克服现有调焦技术的上述不足,,本发明提供一种基于压电陶瓷的可自动对焦ff-oct皮下指纹采集系统。
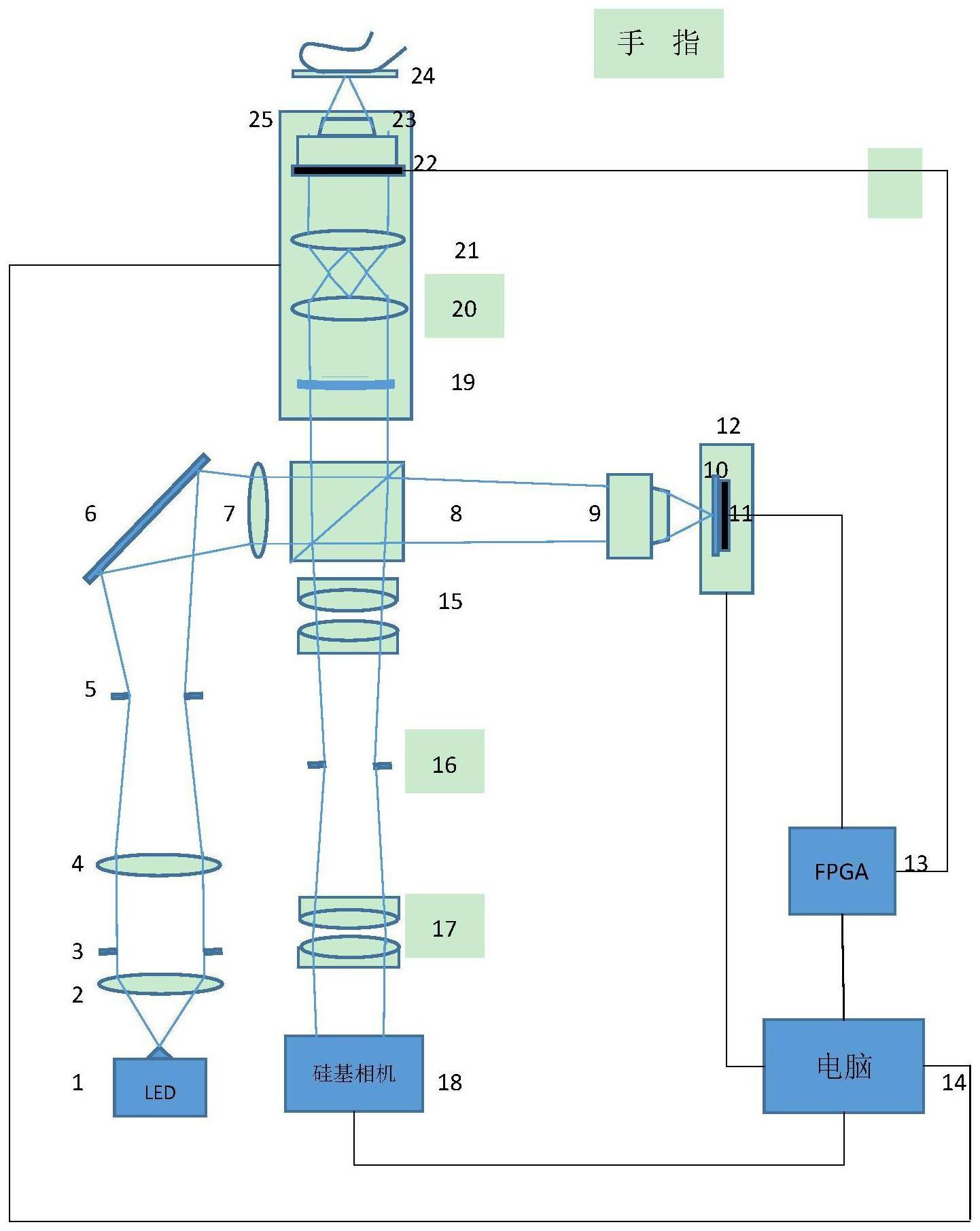
2、本发明的第一个方面提供一种基于压电陶瓷的可自动对焦ff-oct皮下指纹采集系统,包括空间低相干光源、科勒照明模块、分束立方棱镜(8)、样品臂模块、参考臂模块、探测臂模块、信号发生装置、控制系统、中继系统;
3、所述科勒照明模块均匀样本照明和控制杂散光,科勒照明模块包括led光源(1)以及沿着led光源(1)光路依次设置的第一单线透镜(2)、孔径光阑(3)、非球面单线透镜(4)、光阑(5)、光路转折反射镜(6)、第二单线透镜(7),经过第二单线透镜(7)准直的光束通过分束立方棱镜(8)平分到参照臂模块和样品臂模块;
4、所述样品臂模块包括样品臂轴向位移平台(25)和设置在样品臂轴向位移平台(25)上通过光路依次级联的中继系统、压电陶瓷(22)、样品臂显微物镜(23);所述中级系统包括前后设置的前置透镜(20)、后置透镜(21),前置透镜(20)和后置透镜(21)焦距相同;
5、所述参考臂模块包括通过光路依次级联的参考臂光路转折反射镜10、参考臂显微物镜(11)、参考镜(12)、压电陶瓷移相器(13)、参考臂轴向位移平台(14);参考镜(12)与压电陶瓷移相器(13)固定连接,且置于参考臂轴向位移平台(14)上;压电陶瓷移相器(13)带动参考镜(12)移动;
6、所述探测臂模块包括通过光路依次级联的探测臂物镜(15)、探测光圈(16)、镜筒透镜(17)、硅基相机(18);物镜(15)与镜筒透镜(17)都包含一对以配置排列的消色差双合透镜,以最大限度的减小离轴像差;硅基相机(9)位于探测臂镜筒透镜(8)的后焦面处,采集的信号接入计算机(23)实时显示图像,并根据ttl脉冲方波触发信号保存干涉图像信息;
7、所述参考臂显微物镜(9)、样品臂显微物镜(23)关于分束立方棱镜(8)的位置共轭;
8、所述信号发生装置采用运动控制卡来驱动pzt压电陶瓷改变物镜上下运动来寻找最佳对焦位置;
9、所述控制系统接收硅基相机反馈的图像数据,用于给参考臂轴向位移平台、样品臂轴向,pzt压电陶瓷位移平台提供控制信号;
10、所述中继系统位于样品臂显微物镜间位置;中继系统在pzt压电陶瓷对光束进行调谐的过程中,通过中继系统的中间焦平面移动,以保持样品臂显微物镜的远心成像条件,使系统在样品内不同聚焦深度成像时具有一致的视场,以避免不使用中继系统进行调焦会使不同聚焦深度处的成像视场发生改变。
11、进一步,其特征在于:所述空间低相干光源采用全场均匀照明方式。
12、进一步,所述中继系统中前置透镜(20)和后置透镜(21)采用胶合透镜,以减少系统的中体色差。
13、进一步,所述前置透镜(20)和后置透镜(21)采用100mm焦距的消色差透镜,在满足元件调节范围的同时保持系统的紧凑型。
14、进一步,所述分束立方棱镜(8)采用非偏振分束立方棱镜。
15、本发明的第二个方面提供一种基于压电陶瓷的可自动对焦ff-oct皮下指纹采集系统的指纹采集方法,包括以下步骤:
16、步骤1,将手指置于样品臂玻璃上;
17、步骤2,空间低相干光源发出的非准直光经过科勒照明模块准直后变为准直光束,然后经分束立方棱镜分成两束准直光束,分别进入样品臂模块和参考臂模块;
18、步骤3,进入样品臂模块的准直光束,依次经过补偿透镜、前置透镜、后置透镜、样品臂显微物镜后出射到手指,初始化通过控制系统调控样品臂轴向位移平台轴向移动,使得样品上表面与样品臂显微物镜头的距离为dmin,其中dmin表示在电控调焦镜头初始状态时显微物镜的标称工作距离;
19、步骤4,进入参考臂模块的准直光束,首先被参考臂光路转折反射镜转折,然后经参考臂显微物镜出射到参考镜;
20、步骤5,从样品和参照臂返回的光由相同的分束器重新组合,并通过物镜和透镜的组合以1:1的放大倍数成像到硅基相机上;
21、步骤6,调节pzt压电陶瓷使物镜缓慢下移,期间不断对图像质量进行评估,当指纹图像质量出现极大值时,物镜即聚焦到皮下指纹开始采集的最佳位置;
22、步骤7,pzt压电陶瓷控制物镜聚焦到手指皮下指纹开始的最佳位置后,开始采集不同聚焦深度断层图;
23、步骤8,重复采集不同聚焦深度断层图的4幅不同相位干涉图,进而重构出样品高质量图像。
24、进一步,步骤6中,对图像质量进行评估包括如下步骤:
25、步骤61,将整幅指纹图像以中心点分成的不重叠的图像子块;
26、步骤62,分别计算方向对比度、相关性、能量、嫡、局部均匀性4个统计纹理特征的标量;
27、步骤63,求均值m,标记为子块图像的质量得分;
28、步骤64,求其滤波方差s,标记为全局质量的得分;
29、步骤65,寻找手指指纹质量评估分数峰值,即为聚焦峰值,此时控制pzt压电陶瓷返回至聚焦峰值处所对应的位置,即聚焦到手指皮下指纹最佳位置。
30、进一步,步骤7采集不同聚焦深度断层图,具体包括:
31、步骤71,控制系统调控压电陶瓷的控制信号与移相器驱动信号的频率均为f,面阵探测器触发信号为频率为4f的ttl电平信号,同步信号控制相机采集样品不同深度处的4幅不同相位干涉图;其中频率为4f的相机触发信号在聚焦深度改变之前进行4幅不同相位干涉图的采集,干涉图采集过程中频率为f的驱动信号控制移相器进行移相,从而使采集的4幅干涉图具有不同的相位;
32、步骤72,信号发生器pzt压电陶瓷以频率f进行递增,进而改变焦距,使得样品臂显微物镜的光束被会聚或者发散;此时为了使焦平面与相平面相匹配,在采集图象时候始终保证光程差为0,控制参考臂上压电陶瓷进行对显微物镜的工作距离进行递增,距离为d′;
33、步骤73,改变样品臂显微物镜的工作距离d,dmin≤d≤dmax,用以实现待测样品内部聚焦深度的改变;其中dmax表示在电控调焦镜头调控下样品臂显微物镜的最大工作距离。
34、本发明的有益效果是:
35、(1)利用自动调焦技术实现准确的聚焦在手指皮下指纹开始进行图像采集的位置,快速呈现出样品的高质量图像。
36、(2)使用pzt压电陶瓷进行对手指皮下指纹进行自动聚焦,并采集一定深度的数据。在pzt压电陶瓷对光束进行调谐的过程中,通过中继系统的中间焦平面移动,以保持样品臂显微物镜的远心成像条件,使系统在样品内不同聚焦深度成像时具有一致的视场,以避免不使用中继系统进行调焦会使不同聚焦深度处的成像视场发生改变。
- 还没有人留言评论。精彩留言会获得点赞!