基于自制基准标记的模拟人体呼吸运动测量装置的制作方法
本发明涉及医疗机械,特别涉及一种基于自制基准标记的模拟人体呼吸运动测量装置及其控制方法。
背景技术:
1、在目前面向肝部恶性肿瘤的穿刺手术机器人开发技术中,肝脏穿刺介入手术机器人能代替医生执行复杂的肝部肿瘤放疗手术动作,并且可以精准高效的完成放疗全周期手术过程,其中,放疗手术的麻醉方式大体为局部麻醉,在手术过程中患者局部麻醉的临床表现导致医生操作机器人仍然会有一定的局限性,呼吸、咳嗽、身体移位等都会对肿瘤位置产生不同程度的干扰,进而影响了手术治疗的精度,故在进行手术前需要搭建出模拟人体呼吸运动测量装置,然后通过该装置测量出模拟人体的呼吸运动数据,建立出人体呼吸运动模型,进而通过该模型为人体呼吸运动状态监测提供一定的实验数据来源;
2、然而,现有的模拟人体呼吸运动测量装置一般系统较为复杂,安装速度不够便捷,需要较多的搭建时间,导致其维护和使用过程较为复杂,不便于用户转场使用的同时,也影响测量装置的准确性以及可靠性,且现有测量装置配件价格较高,经济性较差。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于自制基准标记的模拟人体呼吸运动测量装置及其控制方法,简化了测量装置的结构,使用户可以简单有效的通过呼吸运动模拟单元中自制基准标记的位置变化来模拟人体呼吸状态,通过呼吸运动测量单元获取所述自制基准标记的相对位置信息,建立呼吸运动模型,能有效保证模拟呼吸运动的测量装置的准确性以及可靠性,便于用户转场使用,使用户能有效的监测人体呼吸运动状态,且测量装置中配件价格较低,能有效提高测量装置的经济性。
2、第一方面,本发明实施例提供了一种基于自制基准标记的模拟人体呼吸运动测量装置,所述测量装置包括:
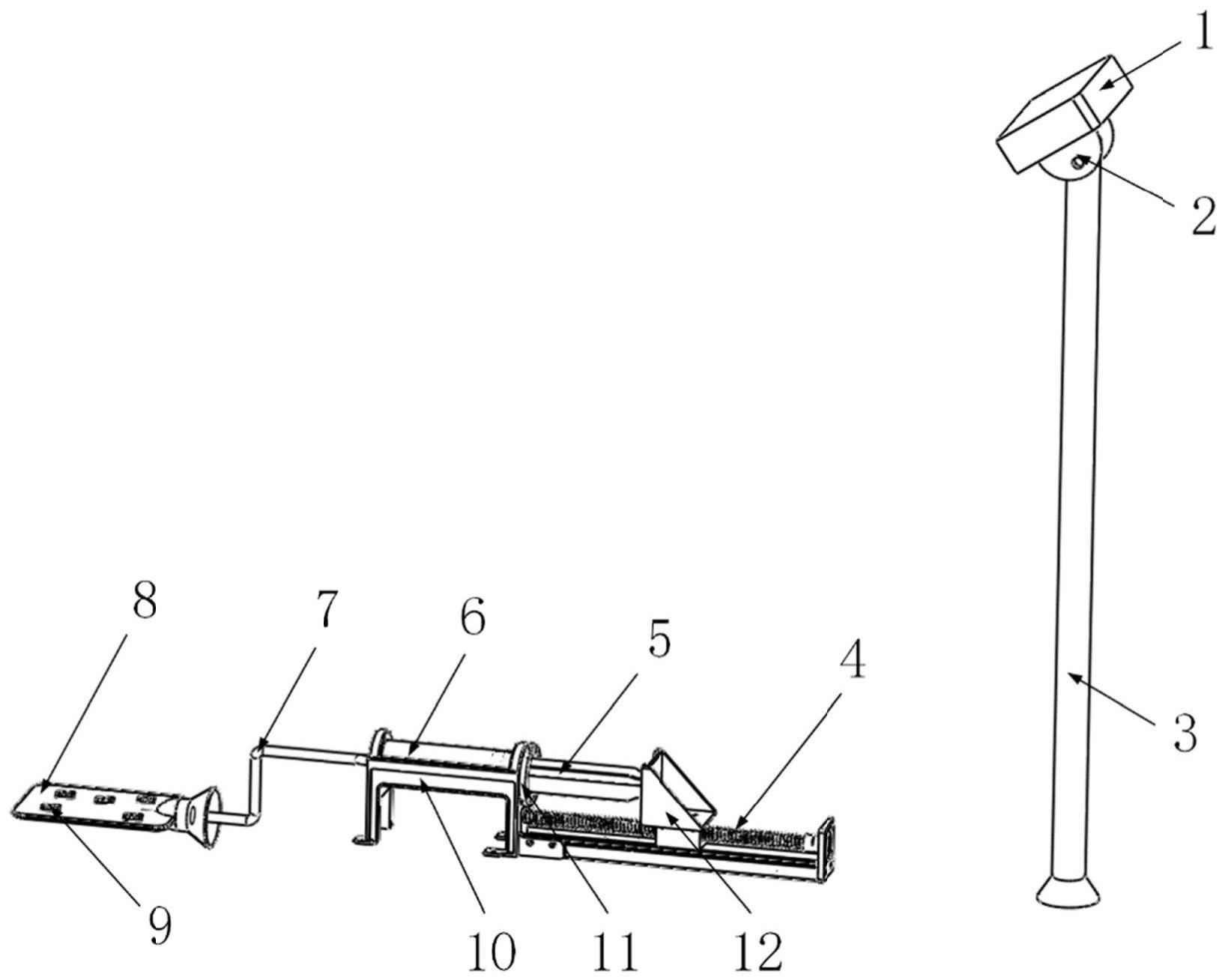
3、呼吸运动模拟单元,包括直线模组、活塞杆、空筒、导管、储气袋、自制基准标记、固定架、固定板和滑块,所述活塞杆的前端插入所述空筒的后端,所述空筒的前端通过所述导管与所述储气袋连接,所述储气袋外侧设置有所述自制基准标记,所述活塞杆的后端通过所述滑块与所述直线模组上的移动滑座连接,所述固定板设置在所述空筒的后端,所述固定架设置在所述空筒外侧;
4、呼吸运动测量单元,包括双目相机、固定座和相机支架,所述双目相机通过所述固定座与所述相机支架连接;
5、其中,在所述直线模组驱动所述移动滑座运动,使得所述活塞杆在所述空筒内往复运动时,所述相机支架用于将所述双目相机固定在目标位置,所述双目相机用于获取所述自制基准标记的相对位置信息,以使所述测量装置根据所述相对位置信息建立呼吸运动模型。
6、在一些实施例中,所述活塞杆包括位于前端的橡胶活塞和位于后端的活塞杆柄,所述空筒包括空筒套管、空筒底部和空筒顶部,所述空筒与所述活塞杆之间同轴布置,所述活塞杆通过所述橡胶活塞滑入到所述空筒套管内部,并在所述直线模组的驱动下,在沿所述活塞杆轴向方向进行往复运动。
7、在一些实施例中,所述固定架包括导向孔和限位槽,所述空筒顶部嵌入到所述导向孔内,所述空筒底部嵌入到所述限位槽内,所述固定板与所述空筒同轴布置,所述固定板上设置有螺钉孔,所述固定架上设置有螺纹孔,所述螺纹孔通过螺钉将所述固定板连接到所述固定架上,使得所述空筒在所述固定架和所述固定板之间形成腔体,以使所述空筒内的气体在所述活塞杆往复运动的作用下,进入所述储气袋,或者从所述储气袋被抽出。
8、在一些实施例中,所述滑块上设置有轴孔和导向滑槽,所述轴孔用于通过螺钉与所述移动滑座固定连接,所述导向滑槽用于嵌入所述活塞杆后端,以使在所述直线模组通过所述移动滑座和所述滑块驱动所述活塞杆在所述空筒内进行往复运动。
9、在一些实施例中,所述自制基准标记的中心位置设置有apriltag标记码,所述测量装置还包括所述呼吸运动建模单元,所述呼吸运动建模单元用于通过所述双目相机获取所述apriltag标记码的图像信息,并根据apriltag算法和三角测量方法对所述图像信息进行解析处理,得到所述apriltag标记码相对于所述双目相机的三维坐标信息,并进行傅里叶模型构建处理,得到所述呼吸运动模型,其中,所述相对位置信息包括多个时刻的所述三维坐标信息。
10、第二方面,本发明实施例提供了一种基于自制基准标记的模拟人体呼吸运动测量方法,所述方法运用于基于自制基准标记的模拟人体呼吸运动测量装置,所述测量装置包括:呼吸运动模拟单元,包括直线模组、活塞杆、空筒、导管、储气袋、自制基准标记、固定架、固定板和滑块,所述活塞杆的前端插入所述空筒的后端,所述空筒的前端通过所述导管与所述储气袋连接,所述储气袋外侧设置有所述自制基准标记,所述活塞杆的后端通过所述滑块与所述直线模组上的移动滑座连接,所述固定板在所述空筒的后端,所述固定架用于固定所述空筒的位置;呼吸运动测量单元,包括双目相机、固定座和相机支架,所述双目相机通过所述固定座与所述相机支架连接;
11、所述方法包括:
12、在所述直线模组驱动所述移动滑座运动,使得所述活塞杆在所述空筒内往复运动时,通过所述双目相机获取所述自制基准标记的相对位置信息;
13、根据所述相对位置信息建立呼吸运动模型。
14、在一些实施例中,所述自制基准标记的中心位置设置有apriltag标记码,所述通过所述双目相机获取所述自制基准标记的相对位置信息,包括:
15、通过所述双目相机获取所述apriltag标记码的图像信息;
16、根据apriltag算法对所述图像信息进行解析处理,得到所述apriltag标记码的方向位置信息;
17、根据所述方向位置信息进行三角测量处理,得到所述apriltag标记码相对于所述双目相机的三维坐标信息,所述相对位置信息包括多个时刻的所述三维坐标信息。
18、在一些实施例中,所述储气袋外侧设置有多个所述自制基准标记,所述获取所述自制基准标记的相对位置信息,包括:
19、通过所述双目相机获取多个所述apriltag标记码的图像信息,根据apriltag算法对多个所述图像信息进行解析处理,得到多个所述apriltag标记码的方向位置信息,根据多个所述方向位置信息进行三角测量处理,得到多个所述apriltag标记码相对于所述双目相机的三维坐标信息;
20、根据质心均值算法对多个时刻的多个所述三维坐标信息进行处理,得到多个时刻的深度值。
21、在一些实施例中,所述根据所述相对位置信息建立呼吸运动模型,包括:
22、根据多个时刻的深度值进行傅里叶模型构建处理,得到所述呼吸运动模型,以根据所述呼吸运动模型确定呼吸状态。
23、在一些实施例中,所述根据所述相对位置信息建立呼吸运动模型,还包括:
24、根据预设的多种电机转速控制所述直线模组驱动所述移动滑座的速度,以得到多个呼吸状态对应的深度值,所述呼吸状态包括正常呼吸、缓慢呼吸和急促呼吸;
25、分别根据多个呼吸状态对应的深度值进行傅里叶模型构建处理,得到正常呼吸运动模型、缓慢呼吸运动模型和急促呼吸运动模型;
26、获取所述正常呼吸运动模型、所述缓慢呼吸运动模型和所述急促呼吸运动模型的参数估计结果,以根据所述参数估计结果确定输入参数对应的所述呼吸状态。
27、第三方面,本技术实施例提供了一种控制器,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第二方面中任意一项实施例所述的基于自制基准标记的模拟人体呼吸运动测量方法。
28、第四方面,本技术实施例提供了一种计算机可读存储介质,存储有计算机可执行指令,计算机可执行指令用于执行如第二方面中任意一项实施例所述的基于自制基准标记的模拟人体呼吸运动测量方法。
29、本技术方案至少具有以下有益效果:测量装置包括:呼吸运动模拟单元,包括直线模组、活塞杆、空筒、导管、储气袋、自制基准标记、固定架、固定板和滑块,所述活塞杆的前端插入所述空筒的后端,所述空筒的前端通过所述导管与所述储气袋连接,所述储气袋外侧设置有所述自制基准标记,所述活塞杆的后端通过所述滑块与所述直线模组上的移动滑座连接,所述固定板设置在所述空筒的后端,所述固定架设置在所述空筒外侧;呼吸运动测量单元,包括双目相机、固定座和相机支架,所述双目相机通过所述固定座与所述相机支架连接;简化了测量装置的结构,使用户可以简单有效的通过呼吸运动模拟单元中自制基准标记的位置变化来模拟人体呼吸状态,通过呼吸运动测量单元获取所述自制基准标记的相对位置信息,在所述直线模组驱动所述移动滑座运动,便于用户转场使用,使得所述活塞杆在所述空筒内往复运动时,所述相机支架用于将所述双目相机固定在目标位置,所述双目相机用于获取所述自制基准标记的相对位置信息,以使所述测量装置根据所述相对位置信息建立呼吸运动模型,通过赋予模型参数值,可以判断出呼吸状态,有利于为后续呼吸运动监测以及预测呼吸提供一定的实验数据,进而能有效保证模拟呼吸运动的测量装置的准确性以及可靠性,使用户能有效的监测人体呼吸运动状态,且测量装置中配件价格较低,能有效提高测量装置的经济性。
30、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!