一种爬楼行走机构及具有其的轮椅、医护床的制作方法
本发明属于移动机器人,具体涉及一种爬楼行走机构及具有其的轮椅、医护床。
背景技术:
1、随着目前社会老龄化趋势越来越严重,年轻人逐渐减少,老年人越来越多,如何照顾好老人同时尽量减少适龄劳动力在养老事业的投入的矛盾逐渐成为社会矛盾的的一个主流。老年人因为身体原因出行不便,坐公交等出行工具,由于人数太多非常拥挤,容易造成身体受伤,现在设计的一些平衡车操作难度大,对于人体的平衡性要求过高,不适合老年人使用,另外其只能在平地使用,在老年人爬楼时无法使用,通用性较低,现有的轮椅无法爬楼或者下楼,在没有电梯的居民楼里,老年人出行较为不便。
2、因此,如何提供一种爬楼行走机构及具有其的轮椅、轮椅床是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种爬楼行走机构及具有其的轮椅、轮椅床,适用于有意识无行动能力的重病号和老人的自我护理或无意识的老人和重病号远程监护护理。
2、为了达到上述目的,本发明采用如下技术方案:一种爬楼行走机构,其包括:
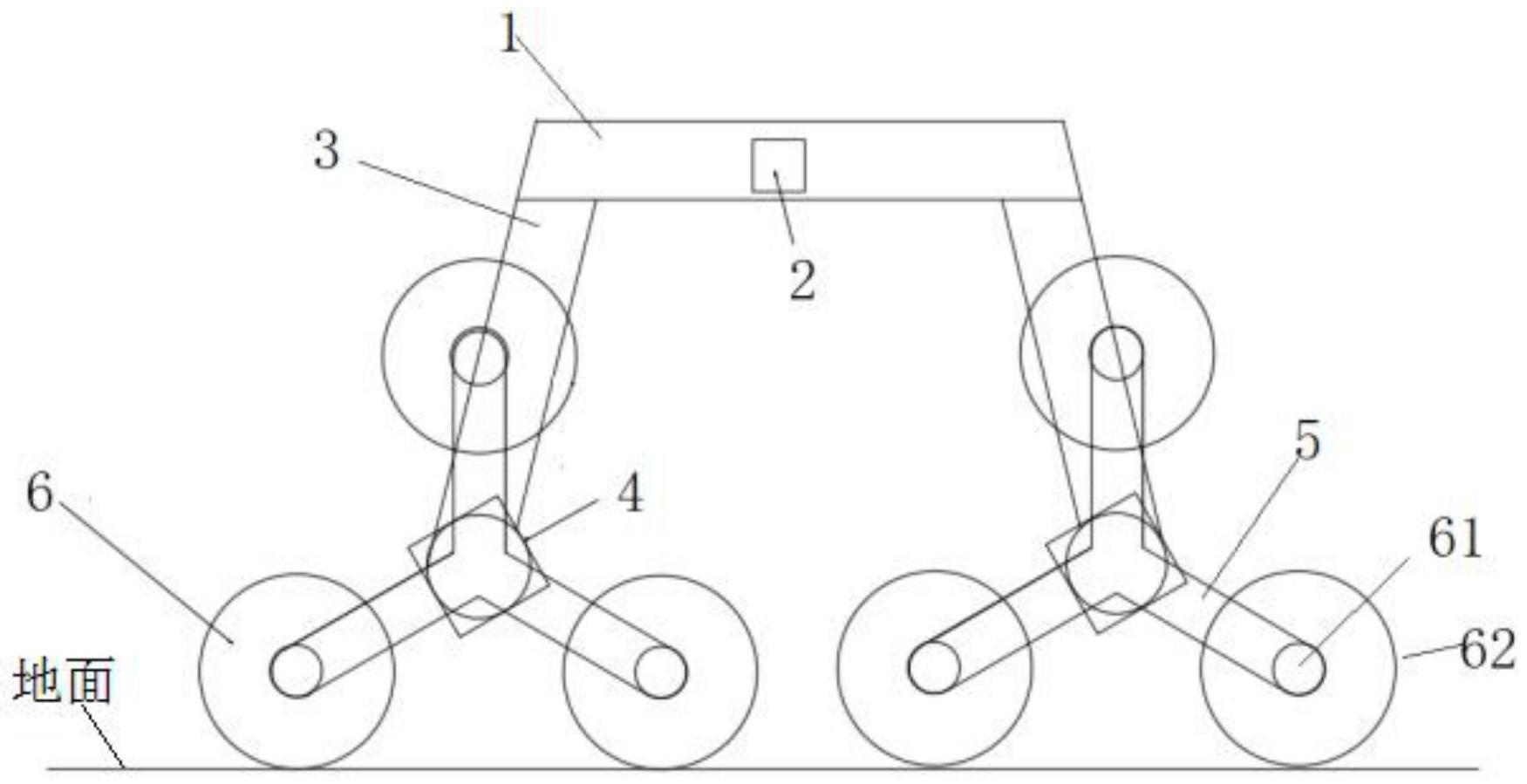
3、过渡安装支座,所述过渡安装支座的中部设有监测过渡安装支座平衡状态的陀螺仪;
4、伸缩承载杆,所述伸缩承载杆有四组且布置在所述过渡安装支座的底部四周,所述陀螺仪与伸缩承载杆电信号连接并控制伸缩承载杆的伸缩状态;
5、双头主轴电机,所述双头主轴电机有两组且分别水平固定在相邻两个伸缩承载杆的执行端;
6、三角轮架,所述三角轮架有多组,所述双头主轴电机的输出轴与对应侧的三角轮架中心固连;
7、行走轮组,每一个三角轮架的端部边缘均转动连接有行走轮组;
8、控制系统,所述控制系统分别与陀螺仪、伸缩承载杆、双头主轴电机、行走轮组电信号连接,所述控制系统控制行走轮组的转动状态。
9、本发明的有益效果是:爬楼行走机构是基于过渡安装支座、伸缩承载杆、双头主轴电机、三角轮架及行走轮组实现的,在平面行走时,三角轮架上的两个行走轮组触地,正常行走,此时双头主轴电机的输出轴是锁止不转的,爬楼时,行走轮组锁止不转,利用双头主轴电机控制三角轮架转动,完成爬楼、下楼过程,此过程中,由于陀螺仪的存在,能联动控制四个伸缩承载杆工作,保证过渡安装支座平衡稳定,方便后续的安装使用,避免倾翻。
10、优选的,所述行走轮组均包括无刷电机及行走轮,所述无刷电机固定在所述三角轮架的端部边缘,所述行走轮固定在所述无刷电机的输出轴上,所述三角轮架及其上配套的三个行走轮组构成三角轮系。
11、优选的,所述无刷电机分别与控制系统电信号连接,所述无刷电机采用零速全力矩控制方式控制行走轮运动状态。
12、优选的,所述双头主轴电机采用零速全力矩控制方式控制其输出轴的运动状态。
13、优选的,所述过渡安装支座的端部均布置有摄像头,所述摄像头分别与控制系统电信号连接,所述控制系统布置在所述过渡安装支座上。
14、本发明改公开了一种轮椅,其包括爬楼行走机构及椅座,所述椅座可拆卸连接在所述过渡安装支座的顶部,所述椅座为折叠椅座,所述椅座平铺状态对应形成床结构。
15、本发明还公开了一种医护床,其包括爬楼行走机构及床板,所述床板为折叠板,所述床板可拆卸连接在所述过渡安装支座的顶部,所述床板折叠状态对应形成椅结构,床板上布置有健康监测仪器,方便护理人员监测老人状态信息。
16、本发明的有益效果是:爬楼行走机构配合椅座或者床板可以自由转换形态,方便出行,可实现轮椅在各种崎岖不平路面和楼梯等特殊路面下的行走。
技术特征:
1.一种爬楼行走机构,其特征在于,包括:
2.根据权利要求1所述的一种爬楼行走机构,其特征在于,所述行走轮组(6)均包括无刷电机(61)及行走轮(62),所述无刷电机(61)固定在所述三角轮架(5)的端部边缘,所述行走轮(62)固定在所述无刷电机(61)的输出轴上,所述三角轮架(5)及其上配套的三个行走轮组构成三角轮系。
3.根据权利要求2所述的一种爬楼行走机构,其特征在于,所述无刷电机(61)分别与控制系统(8)电信号连接,所述无刷电机(61)采用零速全力矩控制方式控制行走轮(62)运动状态。
4.根据权利要求3所述的一种爬楼行走机构,其特征在于,所述双头主轴电机(4)采用零速全力矩控制方式控制其输出轴的运动状态。
5.根据权利要求4所述的一种爬楼行走机构,其特征在于,所述过渡安装支座(1)的端部均布置有摄像头(7),所述摄像头(7)分别与控制系统(8)电信号连接,所述控制系统(8)布置在所述过渡安装支座(1)上。
6.一种轮椅,其特征在于,包括权利要求1-5任意一项所述的爬楼行走机构及椅座,所述椅座可拆卸连接在所述过渡安装支座(1)的顶部,所述椅座为折叠椅座,所述椅座平铺状态对应形成床结构。
7.一种医护床,其特征在于,包括权利要求1-5任意一项所述的爬楼行走机构及床板,所述床板为折叠板,所述床板可拆卸连接在所述过渡安装支座(1)的顶部,所述床板折叠状态对应形成椅结构。
技术总结
本发明公开了一种爬楼行走机构及具有其的轮椅、医护床,其包括:过渡安装支座,过渡安装支座的中部设有监测过渡安装支座平衡状态的陀螺仪;伸缩承载杆,伸缩承载杆有四组且布置在过渡安装支座的底部四周,陀螺仪与伸缩承载杆电信号连接并控制伸缩承载杆的伸缩状态;双头主轴电机有两组且分别水平固定在相邻两个伸缩承载杆的执行端;三角轮架,三角轮架有多组,双头主轴电机的输出轴与对应侧的三角轮架中心固连;行走轮组,每一个三角轮架的端部边缘均转动连接有行走轮组;控制系统,控制系统分别与陀螺仪、伸缩承载杆、双头主轴电机、行走轮组电信号连接,控制系统控制行走轮组的转动状态,本发明通过性强,使用方便,适宜老年人出行。
技术研发人员:高翔
受保护的技术使用者:大连智云汇智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!