一种面向本体感假肢的运动电刺激反馈感知系统及方法
本发明涉及假肢,尤其涉及一种面向本体感假肢的运动电刺激反馈感知系统及方法。
背景技术:
1、上臂截肢患者面临很多生活难点,完成一些简单的任务可能会变得更加困难。假肢对他们来说是一种重要的辅助工具,可以帮助他们实现日常功能、改善生活质量。为了建立截肢患者与假肢更强的身体连接感,需要足够的反馈信息来模拟自然肢体的感知能力和运动控制。通过感知假肢的运动和状态,并逐渐恢复对自身能力的信心。
2、目前假肢产生反馈的方式主要是振动、压力反馈和电刺激反馈。传统假肢一般使用机械运动方式产生振动、压力反馈,其效果一般且维护成本很高。而基于电刺激反馈方式的假肢,电刺激的感觉和强度由电流脉冲的幅度、频率和宽度等调制,调节这些参数中的一个或它们的组合,电流流经阳极和阴极之间的皮下区域,并刺激神经末梢(即皮肤的受体)和肌肉感受器,相较振动反馈,可以呈现更加细腻丰富的感觉,且刺激安静,私密性更好。电刺激装置相较于其他机械装置,其驱动器的尺寸更小,具有便携和可穿戴的优点,有更好的应用前景。
3、经文献检索发现,中国专利公开号为cn114177472a,专利名称为:一种应用于下肢假肢的植入式电刺激感知反馈系统,申请日为2022年3月15日。该发明提出了一种应用于下肢假肢的植入式电刺激感知反馈系统,通过该系统能够解决现有下肢假肢佩戴中患者无法真实感知假肢的运动状态,实现下肢残肢处肌肉群的收缩,增强患者使用假肢的真实感与自然感。但该假肢需要植入体内,不方便使用,且电刺激肌肉会产生较大不适感,需要很长时间适应。
4、经文献检索发现,中国专利公开号为cn111449813a,专利名称为:一种用于假肢手运动姿态感觉反馈的穿戴式电刺激系统,申请日为2020年7月28日。该发明提出了一种用于假肢手运动姿态感觉反馈的穿戴式电刺激臂环。能实时将假肢手手指的运动姿态信息,包括手指掌指关节的角度和手指运动角速度,来调节电刺激的通道、幅值和频率,输出电刺激信号反馈给用户。但是该系统缺乏人体感知的理论基础,只能输出几种由实验选择的固定的电刺激参数来对应手指的运动,在刺激参数转换时会有很明显的断层感,且只是对电刺激的原始感知和运动的简单一一对应,并没有真实手指运动的感觉,需要使用者学习训练后才能勉强使用。
5、总体来说,之前的电刺激可穿戴装备,植入式刺激肌肉的方式对人体有较大危害,且刺激方式缺乏人体感知的理论基础,电刺激参数由实验感觉选择,多采用单一分级刺激方式,不能模拟自然肢体的感知能力。因此,有必要设计一种结合人体感知机理的面向本体感假肢的运动电刺激反馈感知系统及方法来满足感知假肢的运动和状态的功能需求。
技术实现思路
1、针对现有技术的不足,本发明提供一种面向本体感假肢的运动电刺激反馈感知系统及方法,通过读取假肢运动信息,依据肌梭模型和人体神经感受机理,处理成实时调节频率的电刺激脉冲来刺激残肢皮肤,以解决上述背景技术提出的目前电触觉刺激装备不能模拟自然肢体的感知能力的问题。
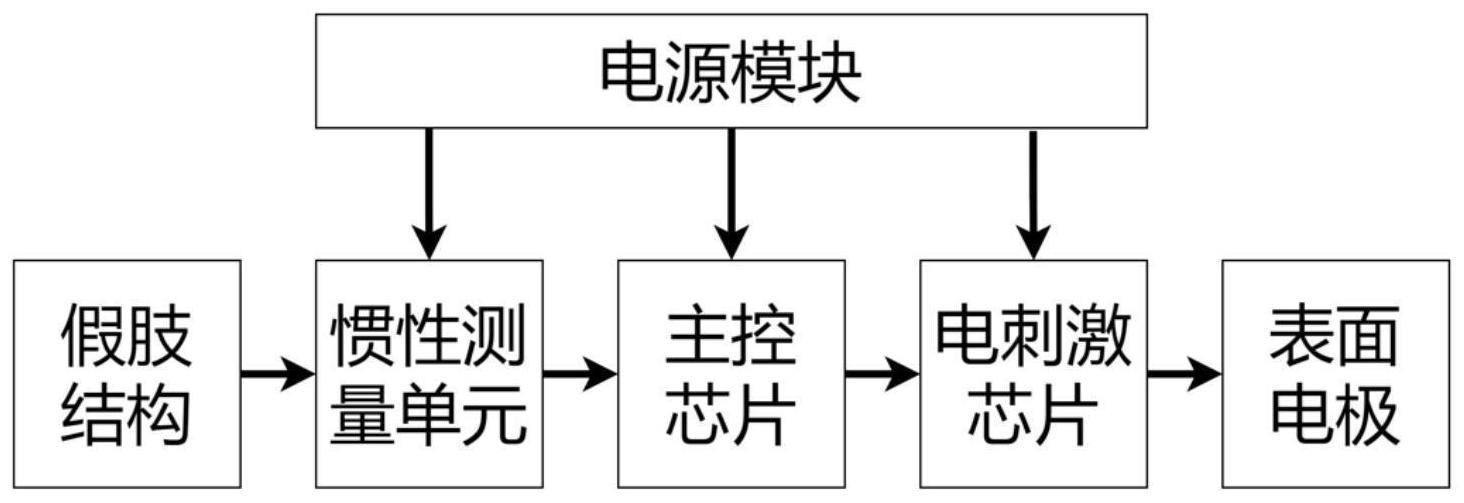
2、一方面,一种面向本体感假肢的运动电刺激反馈感知系统,包括:电源模块、控制电路、表面电极以及假肢结构;
3、所述假肢结构内部为中空结构,内壁嵌有所述表面电极,假肢结构外表面设置所述控制电路和电源模块;
4、所述控制电路包括惯性测量单元、主控芯片、电刺激芯片;
5、所述惯性测量单元为运动处理传感器,其输出端连接所述主控芯片的输入端。优选地,所述惯性测量单元模块为mpu6050;
6、所述主控芯片的输出端连接所述电刺激芯片的输入端;优选地,所述主控芯片为st公司基于arm cortex-m内核开发的32位微控制器stm32;
7、优选地,所述电刺激芯片为暖芯迦公司ens001-a全功能神经电刺激芯片;
8、所述表面电极为带水凝胶的3*3cm表面电极,内嵌于所述假肢结构内壁,与所述电刺激芯片电流输出接口相连;
9、所述电源模块包括充电模块、锂电池以及升降压模块;所述充电模块的输出端连接所述锂电池,锂电池的输出端连接所述升降压模块的输入端,升降压模块的输出端连接控制电路。
10、另一方面,一种面向本体感假肢的运动电刺激反馈感知方法,基于前述一种面向本体感假肢的运动电刺激反馈感知系统实现,包括以下步骤:
11、步骤1:假肢运动,惯性测量单元对假肢运动进行测量,并将假肢的运动信息传送至主控芯片;
12、步骤2:主控芯片读取假肢的运动信息;
13、步骤2.1:主控芯片获取运动信息,通过响应算法转换为初步控制调节电刺激芯片输出电刺激脉冲的频率参数;优选地,所述响应算法为基于肌梭模型的响应算法;
14、所述肌梭模型等效为电路模型,肌梭模型的公式表示为:
15、
16、其中ka,kb,kc为弹性元件的弹性系数,弹性元件可等效为电路模型中的电阻,其中db,dc为阻尼元件的阻尼系数,阻尼部件可等效为电路模型中的电容,a(t)、b(t)、c(t)为对应位置长度随时间的变化,拉普拉斯变换后为a(s)、b(s)、c(s)为对应电路模型对应位置电压变化,电阻两端的电压变化拉普拉斯变换后为kaa(s)、kbb(s)、kcc(s),电容两端电压变化拉普拉斯变换后为sdb(a(s)-b(s))和sdcc(s),其中s为拉普拉斯算子;
17、所述响应算法采用二阶iir滤波器实现,公式表示为:
18、y(n)=b0*x(n)+b1*x(n-1)+b2*x(n-2)-a1*y(n-1)-a2*y(n-2)
19、其中b0、b1、b2、a1和a2是滤波器的系数,分别对应h(z)各系数,x[n]是输入信号的当前样本,y[n]是输出信号的当前样本;
20、步骤2.2:将初步控制调节电刺激芯片输出电刺激脉冲的频率参数经激活函数转换为控制调节电刺激芯片输出电刺激脉冲的频率参数;优选地,所述激活函数为基于人体神经感受机理的激活函数,具体为tanh函数;
21、步骤2.3:根据电刺激参数调节策略,将控制调节电刺激芯片输出电刺激脉冲根据手臂肌肉与皮肤电刺激感知调节电刺激参数;优选地,所述电刺激参数调节策略为基于肌肉收缩活动信号与人体经皮电刺激响应特性调节电刺激的频率;
22、优选地,所述控制调节电刺激芯片输出电刺激脉冲为双向恒流电刺激,经所述响应算法和所述激活函数后调节所述控制调节输出电刺激脉冲的频率参数,其他参数如电刺激正负脉宽,正负电流幅值,正负脉冲间死区时间,电刺激阈值根据不同使用者自适应调节;
23、步骤3:主控芯片将假肢的运动信息经过所述响应算法和激活函数,并自适应调节电刺激脉冲参数后,将该参数实时传输给所述电刺激芯片,电刺激芯片根据该参数调节电刺激输出,该输出最终经位于假肢内壁并贴在截肢患者皮肤表面的表面电极,电刺激脉冲刺激皮下组织和肌肉,截肢患者将会感觉到假肢的运动。
24、采用上述技术方案所产生的有益效果在于:
25、本发明提供一种面向本体感假肢的运动电刺激反馈感知系统及方法,本发明结合肌梭感受模型和人体感知机理的电刺激反馈传递给残肢的神经末梢,可以模拟自然肢体的运动感觉功能。电刺激反馈提供实时的感觉反馈,使截肢患者能够更准确地控制假肢的运动。通过感知电刺激变化,患者可以调整肢体姿势和运动,从而提高运动控制的精确性和流畅度。通过刺激残肢神经,可以促使神经系统重新建立与肢体连接的神经路径,促进截肢患者的神经重塑和再适应,提高患者对假肢的感知和控制能力。将会极大提高截肢患者的生活质量和心理健康。使用频率调节的电刺激反馈,强度、模式和区域可以根据患者的感知和控制能力进行调整,可以根据患者的个体需求个性化定制,实现最佳的适应性和效果。
- 还没有人留言评论。精彩留言会获得点赞!