球管旋转角度显示方法、装置、存储介质和DR系统与流程
本技术涉及医疗系统,特别是涉及一种球管旋转角度显示方法、装置、存储介质和dr系统。
背景技术:
1、数字化x射线摄影(dr,digital radiography)系统是计算机数字图像处理技术与x射线放射技术相结合而形成的一种先进的医疗系统。dr系统因其辐射剂量小、影像质量高、疾病的检出率和诊断的准确性较高而被广泛的应用。
2、dr系统球管绕水平轴的旋转角度为rha,是临床技师在摆位时常需要参考的度数反馈。当前各种通用的dr系统的rha的角度定义为球管限束器开口方向垂直向下为0°,在某些检测场景下,例如检测对象采用立位进行检测时,此时rha角度的反馈与用户期望的x射线入射角度不匹配,若想满足所期望的x射线入射角度,需要在当前rha角度基础上进行计算,确定rha角度与x射线入射角度的关系,提高了rha角度计算时间长、计算出错的概率,导致机架摆位效率低。
3、因此,相关技术中存在着dr系统的机架摆位效率低的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高dr系统的机架摆位效率的球管旋转角度显示方法、装置、dr系统、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种球管旋转角度显示方法。所述方法包括:
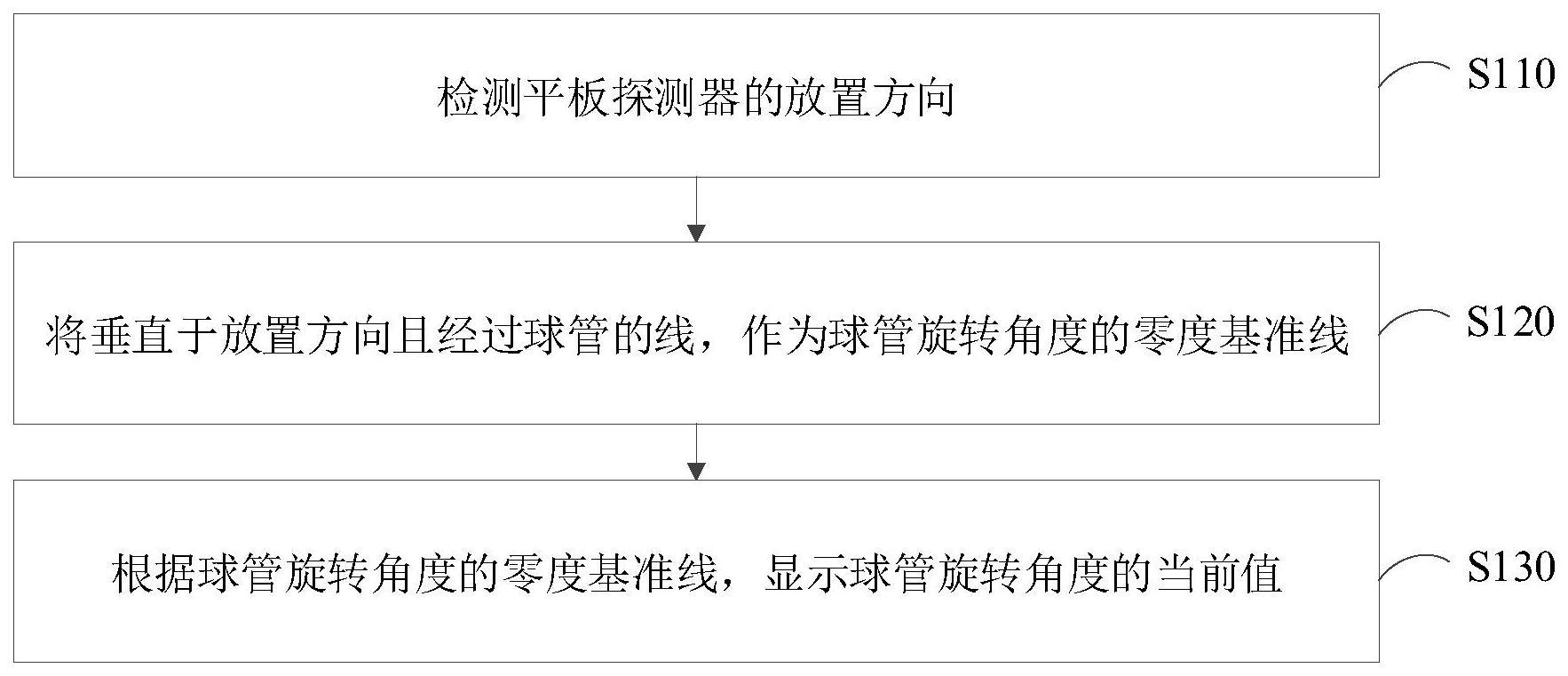
3、检测平板探测器的放置方向;
4、将垂直于所述放置方向且经过球管的线,作为球管旋转角度的零度基准线;所述球管旋转角度为所述球管绕水平轴的旋转角度;
5、根据所述球管旋转角度的零度基准线,显示球管旋转角度的当前值。
6、在其中一个实施例中,所述检测平板探测器的放置方向,包括:
7、响应于对角度显示界面中的角度反馈入口的触发操作,确定所述放置方向;所述角度反馈入口包括用于表征所述零度基准线的方向的图标。
8、在其中一个实施例中,所述角度反馈入口包括立位角度反馈入口和卧位角度反馈入口;所述响应于对角度显示界面中的角度反馈入口的触发操作,确定所述放置方向,包括:
9、当所述立位角度反馈入口被触发时,确定所述放置方向为竖直方向;
10、当所述卧位角度反馈入口被触发时,确定所述放置方向为水平方向。
11、在其中一个实施例中,所述方法应用于dr系统;当所述平板探测器位于片盒外时,所述平板探测器的表面上存在标记点;所述检测平板探测器的放置方向,包括:
12、获取图像采集设备对机架对准的所述平板探测器进行拍摄得到的待识别平板图像;
13、识别所述待识别平板图像中的所述标记点,确定所述平板探测器相对于dr系统零点的三维位置坐标;
14、根据所述三维位置坐标确定所述平板探测器相对于所述dr系统零点的旋转角度;
15、根据所述平板探测器相对于所述dr系统零点的旋转角度,确定所述平板探测器的放置方向。
16、在其中一个实施例中,当所述平板探测器位于片盒内时,所述检测平板探测器的放置方向,包括:
17、确定当前采用的角度采集系统;
18、若所述当前采用的角度采集系统为卧位角度采集系统,则判定所述放置方向为水平方向;
19、若所述当前采用的角度采集系统为立位角度采集系统,则判定所述放置方向为竖直方向。
20、在其中一个实施例中,所述根据所述球管旋转角度的零度基准线,显示球管旋转角度的当前值,包括:
21、确定所述球管对所述平板探测器的入射方向与所述零度基准线之间的偏移角度,作为所述球管旋转角度的当前值;
22、显示所述球管旋转角度的当前值。
23、在其中一个实施例中,所述放置方向与被检对象的检测体位匹配;所述显示所述球管旋转角度的当前值,包括:
24、确定与所述检测体位对应的目标象限区域;
25、在所述入射方向落入所述目标象限区域的情况下,以正值的形式显示所述球管旋转角度的当前值;
26、否则,以负值的形式显示所述球管旋转角度的当前值。
27、第二方面,本技术还提供了一种球管旋转角度显示装置。所述装置包括:
28、检测模块,用于检测平板探测器的放置方向;
29、确定模块,用于将垂直于所述放置方向且经过球管的线,作为球管旋转角度的零度基准线;所述球管旋转角度为所述球管绕水平轴的旋转角度;
30、显示模块,用于根据所述球管旋转角度的零度基准线,显示球管旋转角度的当前值。
31、第三方面,本技术还提供了一种dr系统。所述dr系统包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
32、检测平板探测器的放置方向;
33、将垂直于所述放置方向且经过球管的线,作为球管旋转角度的零度基准线;所述球管旋转角度为所述球管绕水平轴的旋转角度;
34、根据所述球管旋转角度的零度基准线,显示球管旋转角度的当前值。
35、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
36、检测平板探测器的放置方向;
37、将垂直于所述放置方向且经过球管的线,作为球管旋转角度的零度基准线;所述球管旋转角度为所述球管绕水平轴的旋转角度;
38、根据所述球管旋转角度的零度基准线,显示球管旋转角度的当前值。
39、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
40、检测平板探测器的放置方向;
41、将垂直于所述放置方向且经过球管的线,作为球管旋转角度的零度基准线;所述球管旋转角度为所述球管绕水平轴的旋转角度;
42、根据所述球管旋转角度的零度基准线,显示球管旋转角度的当前值。
43、上述球管旋转角度显示方法、装置、dr系统、存储介质和计算机程序产品,通过检测平板探测器的放置方向;将垂直于放置方向且经过球管的线,作为球管旋转角度的零度基准线;球管旋转角度为球管绕水平轴的旋转角度;根据球管旋转角度的零度基准线,显示球管旋转角度的当前值。如此,由于球管旋转角度是根据球管对平板探测器的入射方向与零度基准线之间的偏移确定的,而零度基准线与平板探测器的放置方向垂直,从而使得球管旋转角度的计算逻辑与x射线的入射角度的计算逻辑保持一致,实现了球管旋转角度定义满足平板探测器的实际摆位需求,实现了根据平板探测器的实际摆位自适应调整球管旋转角度计算逻辑,使得球管旋转角度的反馈与临床所需要的x射线的入射角度一致,进而在根据期望入射角度对机架摆位过程中,无需用户先在当前球管旋转角度基础上进行计算,确定当前球管旋转角度与期望入射角度的换算关系,减少了角度计算的过程和角度计算出错的概率,避免进行复杂的计算,可以直接根据显示的球管旋转角度的当前值对机架进行摆位,提高了机架摆位效率。
- 还没有人留言评论。精彩留言会获得点赞!