基于移动开窗法的自适应卡尔曼滤波呼吸频率计算方法
本发明属于呼吸频率检测领域,具体涉及一种基于移动开窗法的自适应卡尔曼滤波的呼吸频率计算方法。
背景技术:
1、呼吸是人类维持生命的必需生理活动之一。呼吸频率(respiratory rate)作为重要的生理参数,直观反映人的即时身体状况。通过监测病患的呼吸频率,可以有效推算心率、细胞乳酸及二氧化碳的含量等生理指标,为后续医疗操作提供理论指导。
2、目前呼吸检测的方法主要包括针对气体成分、光学、声学、肌电、压力及胸部阻抗进行检测等,在野外救援、特种训练、战场作战等复杂环境下,现有的常用于呼吸频率检测方法存在如下缺点:1)基于呼吸道传感器的方法,需要将测量装置内置到上呼吸道,严重干扰复杂环境下的救援工作;2)二氧化碳检测法或容积描记术需要专用设备支持,在复杂环境下较难部署;3)基于声学、光学或电磁学的识别方法,容易受到环境干扰,稳定性和可靠性较低;4)通过心电信号的分析获取呼吸波形的方法,需要心电图的支持,而在复杂环境下心电图的实时跟踪和动态测量难以实现;5)使用压力传感器,必须保持对胸部的压力;6)使用阻抗测量的方法需要针织、镀银等复杂工艺,不便于患者行动或大规模量产推广。
3、随着传感技术的发展和惯性测量单元(inertial measurement unit,imu)分辨率的提高,使用其作为运动传感器测量呼吸运动的数据进行呼吸频率检测逐渐变得可行。惯性测量单元集成了三轴陀螺仪、三轴加速度计以及三轴磁力计,各测量元器件使用微机电方案:加速度计集成弹簧质量块和压电或压阻式器件;角速度计集成科里奥利力的测量器件和机械结构;磁力计集成霍尔效应传感器。由于各测量计分别将测量部件集成到一个芯片上,因此测量过程具有频率高、体积小、质量轻、成本低的特点。利用imu测量在静止或运动状态下的物体惯性物理量,如姿态角速度、加速度等,可以用于解算胸廓运动情况,实现直观反应呼吸运动的波形曲线以及对呼吸频率的计算。
4、现有技术中针对imu解算呼吸频率的方法比较少见,主要技术壁垒是对呼吸信号的捕捉。呼吸信号频率范围较小,而人作为传感器载体在运动时姿态范围显著,运动姿态变化可能淹没呼吸信号。另外,针对imu的姿态解算算法以传统卡尔曼滤波为主,传统卡尔曼滤波的噪声协方差阵均需要在滤波前预设并保持固定,因此其对初始位置敏感,不能针对各种环境的实时变化进行自动适应。现有针对呼吸曲线计算呼吸频率的方法中,主要采用峰值检测的方式,寻找峰值点的方法一般使用的是简单的阈值法或差分法,这两种方法都无法针对运动场景的变化进行自动适应,也容易受到噪声的干扰。
技术实现思路
1、本发明针对现有技术中传统呼吸频率检测方案对检测设备要求高,在变化的运动场景或复杂环境下稳定性和可靠性低等缺陷,提出一种基于移动开窗法的自适应卡尔曼滤波呼吸频率计算方法,以达到在特种训练等复杂环境下测量呼吸频率的目的。
2、本发明是采用以下的技术方案实现的:一种基于移动开窗法的自适应卡尔曼滤波的呼吸频率方法,包括以下步骤:
3、步骤a、运动姿态数据获取:
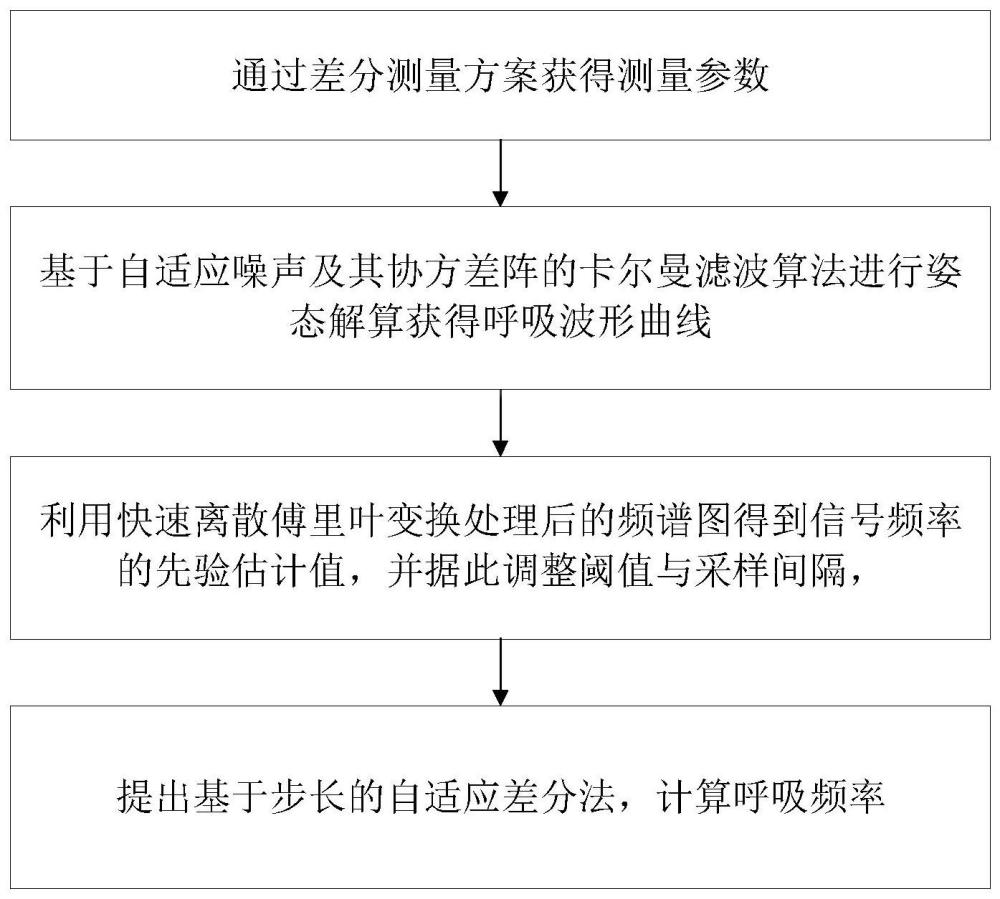
4、采用差分测量方案,使用胸带在前胸中心和后背中心固定两个imu(前imu和后imu),两个imu同时测量载体的运动参数,将地理坐标系作为导航坐标系(n系),记前imu所在的载体坐标系为b1,后imu所在的载体坐标系为b2,并取后imu所在的载体坐标系为标准载体坐标系,在胸廓运动时将前加速度计的值向后加速度计对准。记在载体坐标系(b系)中前加速度计采集的值向后加速度计对准所需的差分值为将加速度的差分值映射到后imu的坐标系,记从载体坐标系(b系)向导航坐标系(n系)转换时姿态转换矩阵为和则加速度的差分过程表示为:
5、
6、其中,为前imu在其所在的载体坐标系下测量的加速度;为后imu在其所在的载体坐标系下测量的加速度,和是过程量,分别指代前后imu在导航坐标系下的加速度值,也是过程量,代表在导航坐标系下前imu测量的加速度向后imu测量的加速度对准所需的差分值。
7、步骤b、运动姿态数据解算:
8、根据imu获得的传感器差分数据,基于自适应噪声及其协方差阵的卡尔曼滤波算法进行姿态解算,并结合移动开窗法和自适应补偿因子算法对协方差矩阵进行迭代最优估计,获得呼吸波形曲线;
9、在进行姿态解算时,具体采用以下方式。
10、(1)以自适应卡尔曼滤波为基准,对于系统噪声协方差阵,在系统开始运行时初始化系统噪声为环境值,然后固定系统噪声,每隔一定的时间(如1个呼吸窗口)更新一次,而非实时更新;对于测量噪声协方差阵,在近似静止以及呼吸频率过高时不进行实时补偿;
11、(2)为预防量测产生的异常或对异常进行纠正,对imu测量的原始信号进行低通滤波,以降低高频噪声分量的影响;滤波后利用移动开窗法对协方差矩阵进行迭代最优估计,提高对单次量测异常的健壮性;使用自适应补偿因子对协方差矩阵进行修正;在残差可能失配时调整自适应补偿因子纠正协方差阵,具体的姿态解算过程如下:
12、1)首先对系统噪声和观测噪声协方差阵进行估计:
13、系统噪声协方差矩阵的改变量如下式所示:
14、
15、系统噪声协方差矩阵的更新公式如下所示:
16、
17、观测噪声协方差矩阵的改变量如下式所示:
18、
19、观测噪声协方差矩阵的更新公式如下所示:
20、
21、其中,dk是更新参量,计算式为(0.95≤b≤0.995),b是遗忘因子,在滤波前进行设置;w(k)和v(k)表示的是第k个历元的系统的过程噪声和系统的观测噪声,记它们的统计特性关系为e(w(k))=qk,e(v(k))=rk;k(k)表示的是第k个历元的卡尔曼增益系数,a是对系统状态的参数矩阵,在卡尔曼滤波中它和对系统控制的参数矩阵b满足如下的关系x(k)=ax(k-1)+bu(k-1)+w(k);h是测量系统的参数矩阵,它和在k时刻的系统测量值z(k)满足z(k)=hx(k)+v(k);是每一轮的预测协方差阵,是每一轮的更新协方差阵。
22、2)引入自适应补偿因子αk,对预测协方差矩阵进行补偿,具体补偿过程如下:
23、
24、其中,q'是系统噪声协方差阵,此时已固定。αk的表示式如下:
25、
26、对于使用自适应的指数加权法,其求解公式如下:
27、
28、其中,ek表示残差,满足关系式是残差理论协方差的估计值,tr()表示对矩阵进行求迹运算,e[]表示对矩阵求期望。
29、步骤c、呼吸频率求解:
30、利用快速离散傅里叶变换处理后的频谱图得到信号频率的先验估计值,并据此调整阈值与采样间隔等自适应参数;根据调整好的自适应参数,利用基于步长的自适应差分法计算呼吸频率,实现更加准确的进行呼吸频率的求解,实现不同情景下的呼吸频率计算。
31、具体的步骤如下:
32、步骤c1、使用自适应差分算法求呼吸波形曲线的下一个峰谷(峰谷即波峰或波谷);
33、步骤c2、利用快速离散傅里叶变换得到频谱图,并由此计算信号频率的先验估计值,根据该先验估计值调整有效数据阈值与差分间隔(以下简称自适应参数),以给下一步自适应差分法提供相对应的自适应参数;
34、1)计算姿态解算得到的呼吸波形曲线上各点数据的移动开窗平均值;
35、
36、
37、其中,nl,nr为待计算的点两边的点数,cn为窗口大小,pi为姿态解算得到的数据,gi为经由移动开窗法计算得到的结果,此处计算窗长与自适应卡尔曼滤波处的窗长一致;
38、2)对gi进行1024点快速离散傅里叶变换,得到频谱数组,用下述公式计算最大幅值索引对应的信号频率作为呼吸频率的先验估计值;
39、
40、其中,n是最大幅值的索引值,f是信号的实际采样频率,n是采集点数;
41、步骤c3、采用基于步长的自适应差分法对数据进行差分、计数和筛选,最终计算呼吸频率,其具体步骤包括:
42、(1)根据上一步设置的采样间隔和自适应的差分阈值等自适应参数,对数据进行差分,以判断呼吸波形数据的每个离散点是否到达波峰和波谷;
43、(2)采用基于步长的呼吸峰谷判断法遍历计数呼吸窗口内呼吸曲线的呼吸波峰谷数,并分别计算当前呼吸步长、预测呼吸步长;根据实际呼吸步长和预测呼吸步长的偏差范围为呼吸峰谷赋值当前置信度和累积置信度,根据置信度的变化情况判断呼吸波峰谷的有效性;
44、(3)筛选得到有效的呼吸波峰谷数量,并据此计算呼吸频率。
45、与现有技术相比,本发明的优点和积极效果在于:
46、本方案采用差分测量方案,将两个imu传感器分别固定在前胸中心与后背中心进行同时测量,取加速度相对值(差分值)作为胸廓运动变化的依据,有效克服了运动姿态变化可能淹没呼吸信号的问题。另外,以自适应噪声及其协方差阵的卡尔曼滤波算法作为基准进行姿态解算,克服传统卡尔曼滤波对初始位置敏感和固定噪声协方差阵的限制,提高滤波解算对环境的适应性;
47、采用结合移动开窗法、自适应指数加权和自适应补偿因子的算法,一方面突出呼吸过程中的趋势变化,另一方面在检测到新息失配时调整补偿因子以抑制滤波发散,提高滤波算法在复杂环境中的稳定性,有效防止了自适应噪声滤波过程中可能出现的滤波发散问题;利用基于步长的自适应差分法和傅里叶变换方法实现根据呼吸曲线有效地计算呼吸频率,一方面根据步长预测和自适应差分减小了呼吸波形曲线中的毛刺影响和小幅震荡的干扰,有效提高了测量的灵活性和准确性;另一方面根据傅里叶变换对信号频率进行先验估计、阈值调整等方法,进一步增强计算结果的准确性。
48、本方案可以在室外运动训练、抢险救灾、战场作战等复杂环境场景下使用,适应复杂环境或特种训练等复杂或变化场景,测量方法具有较好的适应性和鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!