穿刺针控制方法、装置、介质及穿刺机器人与流程
本技术涉及机械控制,特别涉及一种穿刺针控制方法、装置、介质及穿刺机器人。
背景技术:
1、麻醉穿刺设备作为手术麻醉的医疗器械在临床上广泛的使用。目前医院进行的麻醉穿刺操作都由经验丰富的麻醉医生完成。其中超声引导局部麻醉穿刺手术是一种在超声成像的引导下进行的局部麻醉穿刺手术。这种手术通过超声成像技术实时观察患者的内部结构,引导医生准确地进行局部麻醉和穿刺操作。根据需要医生使用穿刺针或导管在局部麻醉下进入患者的皮肤和组织。
2、目前,实际手术中医生需要同时手持超声设备和穿刺针,两手同时配合使用,在超声图像的监视下,进行穿刺操作。但是人手存在抖动,轻微的抖动便容易造成视野丢失,同时由于存在人手对穿刺路径控制精度低等问题,导致该方法穿刺操作难度高,从而降低了穿刺的友好性和便捷性。
技术实现思路
1、本技术实施例提供了一种穿刺针控制方法、装置、介质及穿刺机器人。为了对披露的实施例的一些方面有一个基本的理解,下面给出了简单的概括。该概括部分不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围。其唯一目的是用简单的形式呈现一些概念,以此作为后面的详细说明的序言。
2、第一方面,本技术实施例提供了一种穿刺针控制方法,应用于穿刺机器人,方法包括:
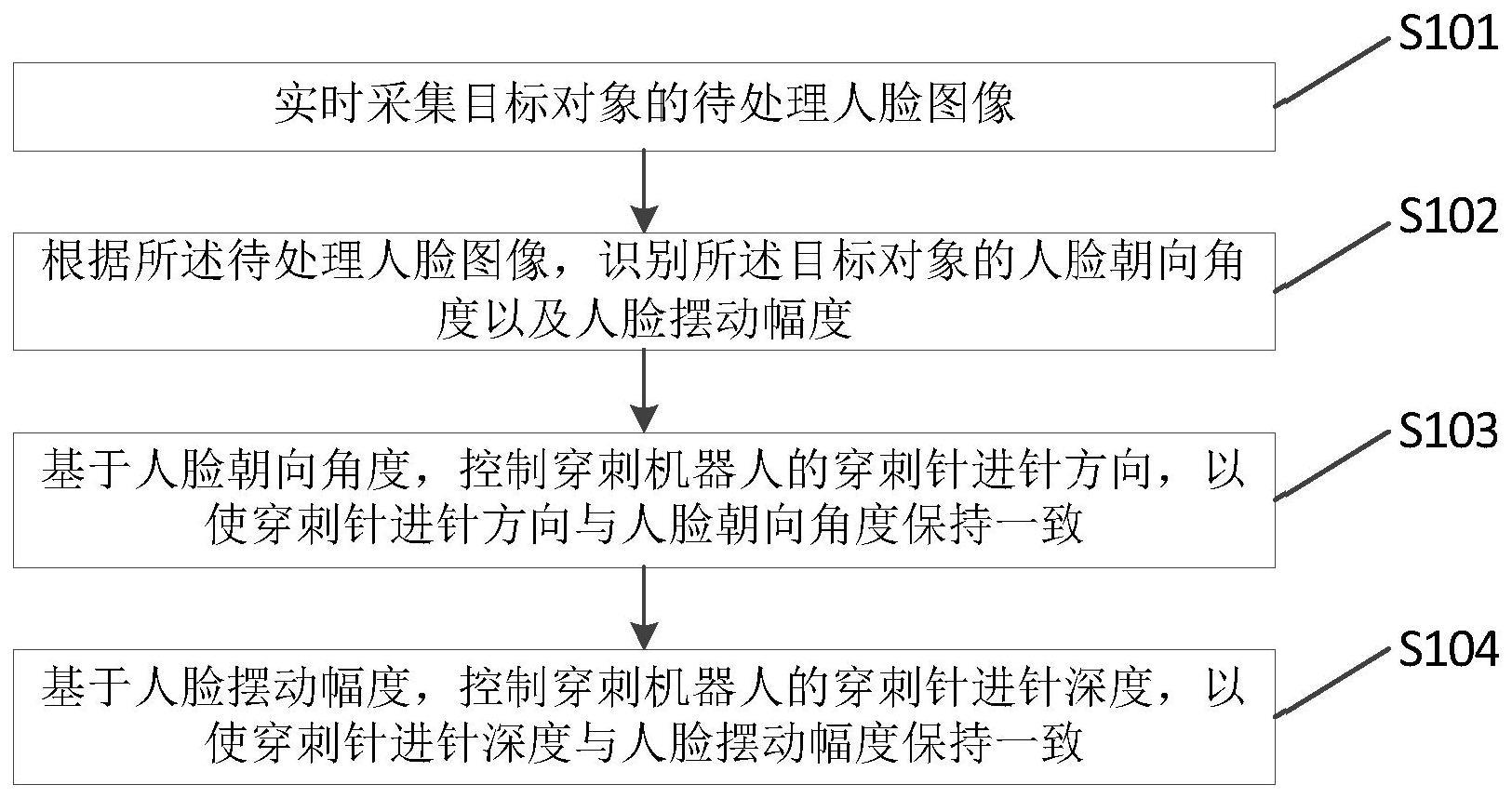
3、实时采集目标对象的待处理人脸图像;
4、根据待处理人脸图像,识别目标对象的人脸朝向角度以及人脸摆动幅度;
5、基于人脸朝向角度,控制穿刺机器人的穿刺针进针方向,以使穿刺针进针方向与人脸朝向角度保持一致;
6、基于人脸摆动幅度,控制穿刺机器人的穿刺针进针深度,以使穿刺针进针深度与人脸摆动幅度保持一致。
7、可选的,根据待处理人脸图像,识别目标对象的人脸朝向角度以及人脸摆动幅度,包括:
8、根据待处理人脸图像,生成各人脸关键点的像素坐标;
9、在各人脸关键点的像素坐标中,确定左眼关键点像素坐标以及右眼关键点像素坐标;
10、根据左眼关键点像素坐标以及右眼关键点像素坐标,计算眼睛中心坐标,并将眼睛中心坐标相对于水平方向的角度作为人脸朝向角度;
11、在各人脸关键点的像素坐标中,确定鼻子关键点和眼睛中心点的坐标;
12、根据鼻子关键点和眼睛中心点的坐标,计算人脸摆动幅度。
13、可选的,根据待处理人脸图像,生成各人脸关键点的像素坐标,包括:
14、将待处理人脸图像转换为灰度图像;
15、将灰度图像进行归一化处理,得到归一化图像;
16、计算归一化图像的梯度信息;
17、根据梯度信息,构建图像的纹理特征和边缘特征,得到归一化图像的hog特征向量;
18、根据hog特征向量,生成各人脸关键点的像素坐标。
19、可选的,计算归一化图像的梯度信息,包括:
20、对于归一化图像中的每个像素点,采用水平和垂直方向上的两个3x3的卷积核与每个像素点周围的像素值进行卷积操作,得到每个像素点的水平卷积结果和垂直卷积结果;
21、计算每个像素点的水平卷积结果和垂直卷积结果的平方和,并将平方和开根号,得到每个像素点的梯度强度;
22、计算每个像素点的垂直卷积结果和水平卷积结果的比值,并对比值进行反正切处理,得到每个像素点的梯度方向;
23、将每个像素点的梯度强度和梯度方向作为归一化图像的梯度信息。
24、可选的,根据梯度信息,构建图像的纹理特征和边缘特征,包括:
25、将归一化图像按照预设像素大小划分为多个小块,得到多个图像单元;
26、将每个图像单元内的像素梯度方向划分为预设数量的方向区间;
27、根据梯度信息,统计每个方向区间内梯度强度的累加和,得到每个图像单元的梯度直方图;
28、根据每个图像单元的梯度直方图,生成图像的纹理特征和边缘特征。
29、可选的,根据hog特征向量,生成各人脸关键点的像素坐标,包括:
30、将hog特征向量输入预先建立的滑动窗口中,以检测人脸像素点,得到图像的人脸区域;
31、将人脸区域输入预先训练的人脸关键点检测器中,以通过该检测器中的深度卷积神经网络提取人脸区域的特征,得到人脸特征;
32、采用级联回归模型对人脸特征进行回归处理,得到各人脸关键点的像素坐标。
33、可选的,基于人脸朝向角度,控制穿刺机器人的穿刺针进针方向,包括:
34、获取穿刺机器人的穿刺针的当前针角度;
35、将人脸朝向角度与当前针角度进行比较,以确定出需要调整的目标角度差值;
36、根据目标角度差值,控制穿刺机器人的角度电机进行转动,直到穿刺针的进针方向与人脸朝向角度一致的情况下,控制角度电机停止转动;
37、基于人脸摆动幅度,控制穿刺机器人的穿刺针进针深度,包括:
38、获取穿刺机器人的穿刺针的当前进针深度;
39、将人脸摆动幅度与当前进针深度进行比较,以确定出需要调整的目标进针深度差值;
40、根据目标进针深度差值,控制穿刺机器人的伺服电机进行转动,直到穿刺针的进针深度与人脸摆动幅度一致的情况下,控制伺服电机停止转动。
41、第二方面,本技术实施例提供了一种穿刺针控制装置,装置包括:
42、超声设备、机械臂、穿刺架以及可移动箱体;其中,
43、超声设备、机械臂、穿刺架与可移动箱体机械连接;其中,
44、超声设备上安装有摄像头,穿刺架包括穿刺针、超声探头、角度电机以及伺服电机;其中,
45、摄像头,用于实时采集目标对象的待处理人脸图像;
46、超声设备,用于根据待处理人脸图像,识别目标对象的人脸朝向角度以及人脸摆动幅度;基于人脸朝向角度,控制穿刺机器人的穿刺针进针方向,以使穿刺针进针方向与人脸朝向角度保持一致;基于人脸摆动幅度,控制穿刺机器人的穿刺针进针深度,以使穿刺针进针深度与人脸摆动幅度保持一致。
47、第三方面,本技术实施例提供一种计算机存储介质,计算机存储介质存储有多条指令,指令适于由处理器加载并执行上述的方法步骤。
48、第四方面,本技术实施例提供一种穿刺机器人,可包括:处理器和存储器;其中,存储器存储有计算机程序,计算机程序适于由处理器加载并执行上述的方法步骤。
49、本技术实施例提供的技术方案可以包括以下有益效果:
50、在本技术实施例中,穿刺针控制装置首先实时采集目标对象的待处理人脸图像;然后根据待处理人脸图像,识别目标对象的人脸朝向角度以及人脸摆动幅度;其次基于人脸朝向角度,控制穿刺机器人的穿刺针进针方向,以使穿刺针进针方向与人脸朝向角度保持一致;最后基于人脸摆动幅度,控制穿刺机器人的穿刺针进针深度,以使穿刺针进针深度与人脸摆动幅度保持一致。由于本技术基于实时采集的人脸图像确定人脸朝向角度以及人脸摆动幅度,该人脸朝向角度以及人脸摆动幅度准确度高,通过人脸朝向角度以及人脸摆动幅度自动控制穿刺针进针方向和进针深度,避免了人手抖动造成视野丢失的问题,从而提升了穿刺的友好性和便捷性。
51、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!