术中地图拓展方法、存储介质及电磁导航支气管镜系统与流程
本发明属于手术导航,涉及一种支气管镜导航方法,尤其涉及一种术中地图拓展方法、存储介质及电磁导航支气管镜系统。
背景技术:
1、支气管镜是呼吸系统疾病的重要诊疗器械之一,用于对支气管腔进行观察以及进行肺部组织活检等。支气管镜手术由支气管镜镜体和器械耗材配合完成。器械耗材包括可视探头、活检钳等(后文简称“器械”), 可由母镜的器械通道伸出。支气管镜导航技术可以在支气管镜手术过程中指明器械末端在患者支气管中的位置,并引导到待观察目标以及活检目标处。
2、目前的支气管镜导航技术,按照利用的信息模态,可分为电磁导航支气管镜、图像导航支气管镜,以及混合模态导航支气管镜等。电磁导航支气管镜是相对可靠并被广泛使用的技术。
3、电磁导航支气管镜在器械中装有磁定位传感器,其实现过程包括:
4、1)对器械进行手眼标定,得到器械末端坐标系和磁定位传感器坐标系之间的坐标变换矩阵(以下简称“手眼标定坐标变换矩阵”)。两个坐标系的示意图如图1所示。
5、和分别是手眼标定中对支气管镜末端位姿和磁定位传感器位姿的采样信息,n为收集的位姿数量。对的求解如公式(1)所示。
6、 (1)
7、的计算方式为首先用奇异值分解的方法进行初始估计,然后用迭代最近点的方法进行优化求解。
8、若已知器械末端的位姿,即可由公式(2)计算出磁定位传感器的位姿
9、 (2)
10、2)对术前ct数据进行处理,得到支气管树的三维形态描述信息(以下简称“地图信息”),其形式为支气管树的表面信息,或支气管树的表面信息和支气管树中各气道中心线信息。根据地图信息,可以在计算机图形界面上显示支气管树的三维形态图(以下简称“地图”)。由于ct的分辨率限制,以及受到支气管局部狭窄或被痰及粘液堵塞等情况影响,ct得到的地图信息可能无法做到肺外周气道的重建。
11、3)手术开始时,进行初始配准。用支气管镜携带器械在支气管中移动,将器械末端依次放置在多个位置,按照磁定位传感器记录的多个坐标,以及与器械末端放置位置最接近的地图特征的坐标,和手眼标定坐标变换矩阵,计算出初始配准坐标变换矩阵。其坐标变换关系如公式(3)所示。
12、 (3)
13、m为初始配准收集的坐标数量。的计算方式与的计算方式相同。
14、初始配准坐标变换矩阵描述磁定位传感器位姿和地图坐标系中的磁定位传感器位姿之间的变换,如公式(4)所示,为器械末端位姿。
15、 (4)
16、4)在手术过程中,由公式(5-6)进行实时配准。
17、得到手眼标定坐标变换矩阵和初始配准坐标变换矩阵后,即可根据公式(5),由手术过程中磁定位传感器输出的实时坐标(以下简称“磁导航轨迹点”),和支气管树中各气道中心线上的点进行配准,得到配准坐标变换矩阵。k为参与配准的点数量。使用icp算法求解公式(5),以作为的初始估计。
18、得到后,由公式(6)计算得到当前磁导航轨迹点对应的配准后的地图坐标系坐标(以下简称“配准点”),并在计算机的图形界面显示。此配准点在地图中的坐标,即代表器械末端在患者支气管腔中的位置。
19、 (5)
20、 (6)
21、电磁导航支气管镜使用的配准技术有多种,例如构建代价函数来计算最佳的配准坐标变换矩阵,或者综合磁定位传感器输出的坐标和角度信息,与支气管树中各气道中心线信息进行icp配准等。另有一些抗呼吸运动干扰的技术,可以在患者呼吸引起支气管形态变化的情况下进行相对有效的配准。
22、在电磁导航支气管镜手术中,器械由母镜的器械通道伸出,可以携带磁定位传感器进入更细的支气管。如果器械能够进入对ct数据进行三维重建时无法分辨的气道,就能够在手术中记录新的地图信息(以下简称“新气道信息”)。
23、新气道信息可以指示已经探索过的区域;在需要到达某目标位置的情况下,它还可以指示距离目标位置更近的路径。本发明提出一种能够在术中拓展地图信息的电磁导航支气管镜系统。其实现方式是根据配准点,在术中记录新气道信息,并据此更新地图信息。
技术实现思路
1、本发明实施例提供了一种术中地图拓展方法、存储介质及电磁导航支气管镜系统,可以根据经配准坐标变换矩阵变换后的磁导航轨迹,在术中记录新气道信息,更新地图信息。
2、第一方面,本发明实施例提供了一种术中地图拓展方法,该方法包括:
3、针对电磁导航支气管镜,在手术开始时进行初始配准得到配准坐标变换矩阵;
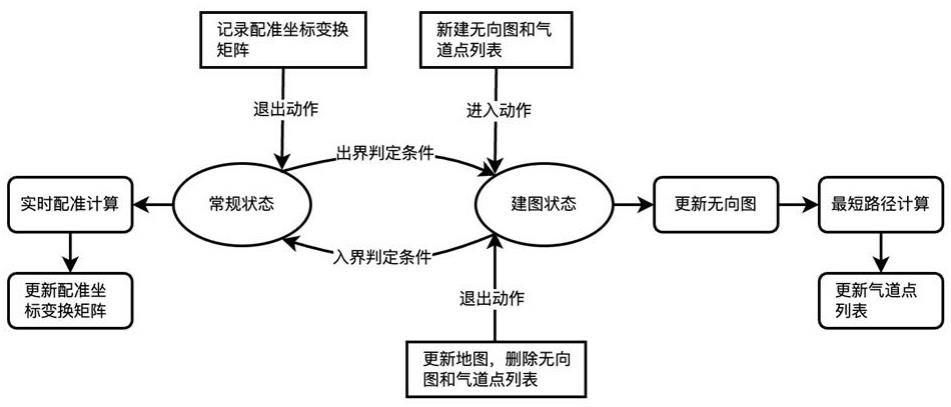
4、在常规状态下,进行实时配准并实时更新配准坐标变换矩阵;由实时的配准坐标变换矩阵及磁导航轨迹点确定当前配准点在地图中的坐标;
5、当满足出界判定条件,记录满足出界判定条件之前最后时刻的配准坐标变换矩阵,并新建一个无向图和一个气道点列表,转移到建图状态;
6、在建图状态下,不再更新配准坐标变换矩阵,基于地图信息中的起始点和所记录的配准点对所述无向图和气道点列表进行更新;每次更新气道点列表后将其与地图信息进行融合,得到新的地图信息;所述气道点列表的更新由所述无向图中最长的最短路径决定;
7、当满足入界判定条件,停止对当前无向图和气道点列表的更新,将气道点列表和地图信息最后一次融合的结果作为新的地图信息,转移到常规状态,恢复对配准坐标变换矩阵的更新。
8、第二方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现任一实施例所述的术中地图拓展方法。
9、第三方面,本发明实施例提供了一种电磁导航支气管镜系统,所述系统包括:
10、一个或多个处理器;
11、存储器,用于存储一个或多个程序;
12、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如任一实施例所述的术中地图拓展方法。
13、本发明实施例所提供的技术方案,通过将电磁导航支气管镜在工作过程中的状态分为两种,即常规状态和建图状态,通过出界判定条件和入界判定条件来确定状态是否转移;且在常规状态中进行实时配准,更新配准坐标变换矩阵,在建图状态中更新无向图和气道点列表,将更新的气道点列表与地图信息进行融合,得到新的地图信息;由配准坐标变换矩阵和磁导航轨迹点可实时确定配准点在地图中的坐标,从而可对新的地图及配准点进行显示。本发明实施例的技术方案能够根据经配准坐标变换矩阵变换后的磁导航轨迹在术中记录新气道信息,并据此更新地图信息。而且在手术中拓展的地图信息可以指示已经探索过的区域。此外,本发明实施例的技术方案由于采用无向图中最长的最短距离来更新气道点列表,可以在需要到达某目标位置的情况下,还可以指示距离目标位置更近的路径。
- 还没有人留言评论。精彩留言会获得点赞!