一种多源CT系统的坏通道数据校正方法与流程
本发明属于x射线医学影像设备的应用领域,具体是一种多源ct系统的坏通道数据校正方法。
背景技术:
1、ct系统为了获得较好质量的重建图像,需要对采集到的投影数据进行预处理,涉及判断从ct探测器读取信号的准确性、可靠性,也包括探测器每个通道(也称为像素)本身的性能是否正常,如果数据异常,并且数量在一定的范围内,则需要对来自探测器异常通道的数据进行校正。如果完全抛弃含有坏通道的模块,将导致探测器成品率显著下降,成本显著上升。
2、随着ct探测器单元尺寸越来越小、排数越来越多,探测器和数据采集系统的集成度越来越高,这些因素导致探测器出现坏通道的情况也越来越多。
3、在光子计数ct系统中,除了上述因素外,探测器的半导体直接转换材料的瑕疵和缺陷,也导致坏通道的比例较间接转换的探测器显著增加。
4、在传统的单源ct系统中,坏通道的检测可通过探测器模块的响应平均值(cn112656435a)来判断,校正一般是通过相邻通道的数据差值(cn104939859a)来代替坏通道的数据,或者旋转180度其他通道的投影数据(cn201410428793.7)来代替坏通道的数据。
5、但是由于越靠近旋转中心(中心通道)的区域,其重建数据来源越单一,旋转中心处,其重建所需数据几乎完全来自于中心通道。并且,人体内结构比较复杂,被扫描区域内并不是均匀的或缓慢变化的,因此在靠近中心通道的探测器数据通过差值修复容易导致伪影的出现。
6、因此,传统的ct系统中,对坏通道的分布有较为严格的要求。例如:不能有相邻的坏通道;16cm视野范围内不能有坏通道;扫描的最外侧层不能有坏通道等要求。
7、为了减少或放松对坏通道分布的要求,可以采用对向的穿过相同路径投影数据来对当前通道做修正。图8显示,对于角度为α的扇束投影中偏离中心通道角度为β的投影与角度为α+180°-2β的投影中偏离中心通道为-β的投影线穿过的路径是相同的,因此可以用来彼此补偿。(其中β以焦点为中心、以穿过中心通道的直线为0度的角度,前面的-符号表示和β处于相反的方向,假设扇角为fan,则β的取值范围为)
8、对于探测器较宽的ct系统,由于锥角的影响,探测器z方向上的外侧排,不适合采用这种方式进行补偿,但靠近探测器z方向中心的若干排的误差是足够小的。
9、利用α和α+180°-2β的两个投影的数据相互补偿,虽然带来了更多可以补偿的数据,但也存在着局限性,在医疗ct中,患者本身存在各种运动,如呼吸、心跳、患者体内胃肠道的蠕动等。
10、α和α+180°-2β,由于β的取值范围为因此二者的间隔最大为180°+fan,假设机架转速为r秒/转,则这两个投影的时间间隔为在扇角为52度的情况下间隔为0.64r,因此,时间间隔比较大,采用时间间隔较大的数据补偿易受患者运动的影响产生伪影。
技术实现思路
1、本发明为了解决上述现有技术中存在的缺陷和不足,提供了一种用于保证图像质量、提高探测器成品率、降低系统成本的多源ct系统的坏通道数据校正方法。
2、本发明解决其技术问题所采用的技术方案是:一种多源ct系统的坏通道数据校正方法,步骤如下:
3、步骤1.对系统采集多次不同管电流的数据,通过线性检查确定坏通道的位置及分布;
4、步骤2.如果坏通道的分布满足:
5、a)相邻通道均为良好通道;
6、b)坏通道不处于一定视野范围内;
7、c)坏通道不处于系统支持的若干探测器采集模式的最外侧排;
8、则采用当前探测器的当前采样周边通道的数据插值来修正目标坏通道的数据;
9、步骤3.如果坏通道的分布不满足步骤2的条件,则根据如下方案检查上一组或下一组球管+探测器组合是否能提供对向投影数据用来修正目标坏通道的数据;
10、步骤4.若可以采用上一组或下一组球管+探测器的对向投影数据来修正当前坏通道,则对数据进行修正,然后进入后续的预处理流程,根据ct系统的球管+探测器数量进行对向投影数据的选取;
11、步骤5.确定对应的球管+探测器组合及采样角度后,根据通道与中心通道的张角计算对应的通道,假设通道间隔为dβ度,则对应通道为ch=-β/dβ,若ch为非整数,可以采用线性插值方法计算对应的投影值。
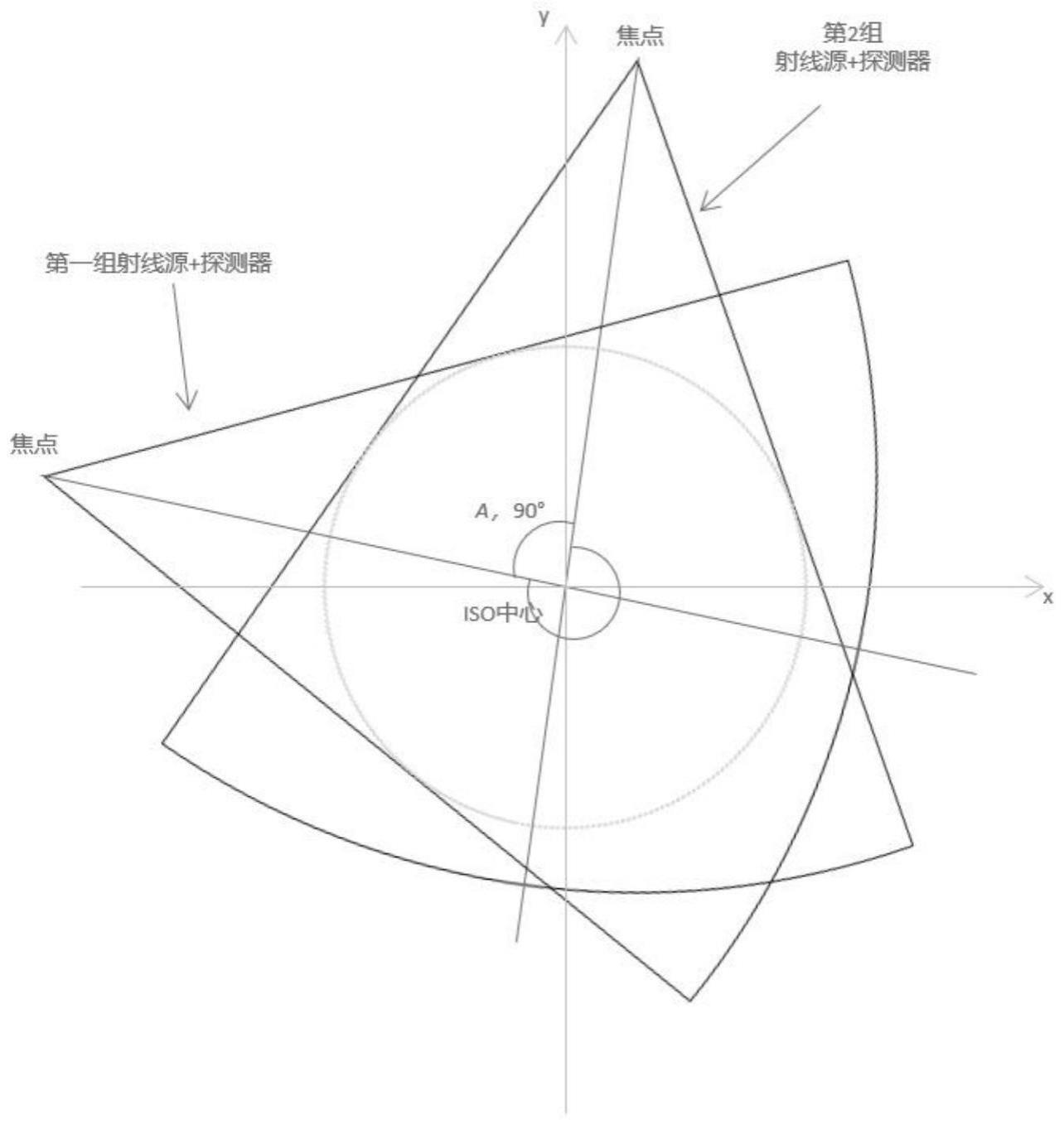
12、优选地,在多源ct系统中,存在1组以上的射线源和探测器,在双源ct系统中,两组射线源+探测器的夹角约为90度;在三源ct系统中,三组射线源+探测器相邻两组之间的夹角约为120度。
13、优选地,对于某一组球管+探测器,若坏通道位于角度为α的投影中偏离中心通道β的数据,靠近中心的探测器排数上,则:
14、a)使用与机架旋转方向相同的相邻的下一个探测器的数据进行补偿,对应的通道数据为α+180°-2β的投影中偏离中心通道-β数据;假设这两组相邻的球管+探测器组合的夹角为a,则用于补偿的球管+探测器组合转过的角度为:α+180°-2β-(α+a)=180°-a-2β;
15、b)使用与机架旋转方向的相邻的上一个探测器的数据进行补偿,对应的通道数据为α-180°+2β的投影中偏离中心通道-β数据;假设这两组相邻的球管+探测器组合的夹角为a,则用于补偿的球管+探测器组合转过的角度为:α-180°-2β–(α-a)=-2β+a-180°。
16、优选地,在双源系统中:
17、a)夹角a分别近似为90度和270度,如果用旋转方向上下一个相邻的球管+探测器组合的数据来校正当前组合的数据,球管转过的角度间隔为(180°-90°-2β),时间间隔为:(180°-90°-2β)/360°·r,当转速r为1秒/转、扇角fan为52度时,β取值范围为[-26°,26°],因此用相邻球管+探测器组合数据校正当前数据的时间差在[0.11r,0.39r]之间,显著低于0.64r;
18、b)同样的,采用相邻的上一组球管+探测器组合的数据,可以得到相同的时间差范围,但为负值,即上一个球管+探测器组合的对应数据产生时间更早;c)如果保证两个球管+探测器组合不重复扫描,则处于旋转方向上后面的组合在经过两组射线源+探测器的夹角a后应停止曝光和数据采集,这也会导致仅有a范围内的数据可以采用相邻球管+探测器组合的数据校正。
19、优选地,在三源系统中:
20、a)夹角a分别为近似120度,因此如果用旋转方向上下一个相邻的球管+探测器组合的数据来校正当前组合的数据,球管转过的角度间隔为(180°-120°-2β),时间间隔为:(180°-120°-2β)/360°·r,当转速r为1秒/转、扇角fan为52度时,β取值范围为[-26°,26°],用相邻球管+探测器组合数据校正当前数据的时间差在[0.02r,0.31r]之间,显著低于单源的最长值0.64r,以及双源的最长值0.39r;
21、b)同样的,采用相邻的上一组球管+探测器组合的数据,可以得到相同的时间差范围,但为负值,即上一个球管+探测器组合的对应数据产生时间更早;
22、c)对于三源系统而言由于在不重复的覆盖全部扫描角度的情况下,三个球管+探测器组合都分别转过120度,所有角度的数据均可以找到上一个或下一个球管+探测器组合的数据来修正当前球管+探测器通道出现的坏数据;
23、d)当起始角度为0时,α的取值范围为[0,120),对向射线所在的投影的角度α+180°-2β可能的取值范围[180°-2β,300°-2β),当β<60°时,没有落在下一组球管+探测器组合可获取的数据角度[120°,240°)范围内,而是落在了上一组(也可以认为是间隔240度的往后第2组)的角度范围[240°,360°)内,可以使用下一组球管+探测器补偿方法使用240度角度间隔,或使用上一组球管+探测器补偿方法使用120度间隔,二者的角度间隔和时间间隔结果是一致的,都是-2β–60°,以及
24、e)当起始角度s不为0度时,可以将上述描述中的α替换为从起始角度开始球管+探测器转过的角度。也就是使用α-s替换上述描述中的α。即算法仅和相对起始角度转过的角度有关。
25、本发明用于保证图像质量、提高探测器成品率、降低系统成本。
- 还没有人留言评论。精彩留言会获得点赞!