一种脊柱配准方法、装置、设备及存储介质与流程
本发明涉及医学图像处理领域,具体涉及一种脊柱配准方法、装置、设备及存储介质。
背景技术:
1、在机器人导航的脊柱微创手术中,脊柱配准是最为关键的一步,它可以得到从术前规划的坐标系(通常为术前ct的坐标系)到实际术中病人手术部位的坐标系的转换关系,为置钉导航的路径提供指引。然而脊柱配准在手术过程中往往需要考虑到很多实际因素,如配准时间、操作复杂度、手术创口、辐射剂量等,因此脊柱配准成为本领域亟待解决的问题。随着计算机技术以及图像处理技术的进步,现在较为先进的方式是利用计算机辅助进行手术,例如c型臂脊柱手术辅助设备,其主要原理是采用手术导航系统定位病患部位,精确定位,避免了医生依靠经验手术的误差。
2、专利cn 111429491 a提供了一种脊柱术前三维影像与术中二维影像配准的方法与系统,通过使用术前ct生成drr图像,并进行椎体分割,将术中c型臂拍摄的x光图像进行椎体分割,最后将术前、术中对应椎体进行配准。该方法通过对脊柱进行椎体分割,采用单椎配准的方法,解决了术前、术中整体脊柱姿态不一致的问题,但是该方法只能获得ct坐标系到x光图像坐标系之间的转换关系,而无法获得ct坐标系到待手术部位坐标系之间的转换关系,无法用来进行机器人手术导航,同时该方案必须提前获取c臂机的焦距、像素间距等参数信息,否则无法获得准确的ct坐标系到c臂机相机坐标系的转换关系,但并不是所有医院里配备的c型臂都能提供这些参数信息,因此无法适配所有的情况。
技术实现思路
1、本发明的目的在于解决上述背景技术中描述的现有技术方案的缺点,提供一种脊柱配准方法、装置、设备及存储介质,可以简便、快速、准确地获取坐标转换关系。本发明使用c臂机拍摄x光影像,具有辐射剂量低、操作简单、耗时短的优点,且通过影像标定模块建立起待手术部位阵列坐标系与x光片图像坐标系之间的关系,不依赖于c臂机本身的参数,因此可以适配任何厂商、任何型号的c型臂。
2、本发明通过以下技术方案予以实现:第一方面,本发明提供一种脊柱配准方法,包括以下步骤:
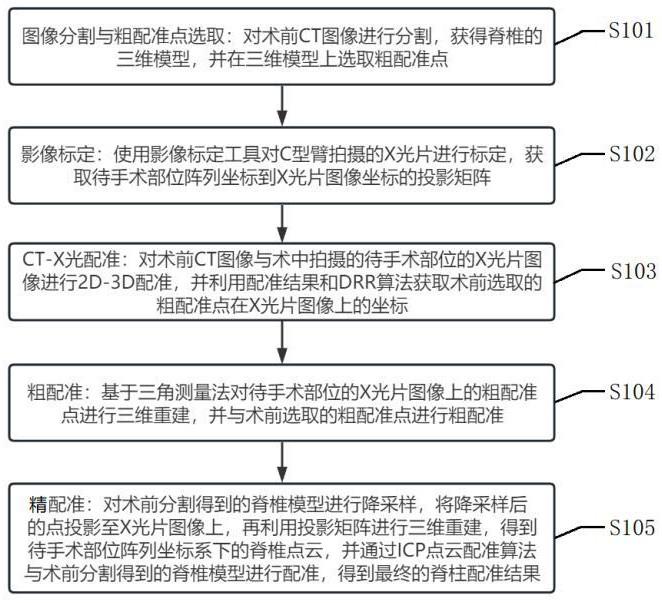
3、s101,图像分割与粗配准点选取:对术前ct图像进行分割,获得脊椎的三维模型,并在三维模型上选取粗配准点;
4、s102,影像标定:使用影像标定工具对c型臂拍摄的x光片进行标定,获取待手术部位阵列坐标到x光片图像坐标的投影矩阵;
5、其中,所述影像标定工具上至少有6个不共面且不被x射线穿透的标定点以及一个光学追踪阵列,所述光学追踪阵列能够被双目相机识别并定位;
6、s103,ct-x光配准:对术前ct图像与术中拍摄的待手术部位的x光片图像进行2d-3d配准,并利用配准结果和drr算法获取术前选取的粗配准点在x光片图像上的坐标;
7、s104,粗配准:基于三角测量法对待手术部位的x光片图像上的粗配准点进行三维重建,并与术前选取的粗配准点进行粗配准;
8、s105,精配准:对术前分割得到的脊椎模型进行降采样,将降采样后的点投影至x光片图像上,再利用投影矩阵进行三维重建,得到待手术部位阵列坐标系下的脊椎点云,并通过icp点云配准算法与术前分割得到的脊椎模型进行配准,得到最终的脊柱配准结果。
9、进一步地,s101中所述在三维模型上选取的粗配准点至少有3个。
10、进一步地,s102中所述影像标定,使用影像标定工具对c型臂拍摄的x光片进行标定,获取待手术部位阵列坐标到x光片图像坐标的投影矩阵,包括以下步骤:
11、使用c型臂拍摄影像标定工具,得到两张不同角度下的x光片;
12、通过图像处理方法识别两张x光片图像上影像标定工具的标定点,分别得到影像标定工具的标定点在两张x光片图像上的坐标;
13、在待手术部位安装阵列,并建立待手术部位阵列坐标系;其中,所述待手术部位阵列坐标系由阵列上的三个反光贴的位置来确定:根据三个反光贴圆心位置确定待手术部位阵列的中心点,并将中心点作为待手术部位阵列坐标系的原点,三个反光贴圆心点所在的平面为xoy平面,垂直该平面向外的轴为z轴,原点到任意一个反光贴圆心点的连线的延长线为y轴,通过叉乘确定x轴的方向;
14、双目相机识别待手术部位的阵列与影像标定工具上的光学追踪阵列,得到待手术部位的阵列与影像标定工具上的光学追踪阵列的位置转换关系,并计算影像标定工具上的标定点在待手术部位阵列坐标系下的坐标;
15、根据获取的影像标定工具上的标定点在两张x光片图像上的坐标与一组标定点在待手术部位阵列坐标系下的坐标,通过直接线性变换法分别得到标定点的待手术部位阵列坐标到两组x光片图像坐标的投影矩阵,也即待手术部位阵列坐标系到两个不同角度下的x光片图像坐标系之间的投影矩阵,分别记为p1,p2;
16、其中,影像标定工具上的标定点在x光片图像上的坐标为2d坐标,影像标定工具上的标定点在待手术部位阵列坐标系下为3d坐标。
17、进一步地,所述图像处理方法采用阈值分割或者连通域分析中的一种。
18、进一步地,s103中所述ct-x光配准,对术前ct图像与术中拍摄的待手术部位的x光片图像进行2d-3d配准,并利用配准结果和drr算法获取术前选取的粗配准点在x光片图像上的坐标,包括以下步骤:
19、使用c型臂拍摄待手术部位的x光片;
20、对术前ct图像与术中待手术部位的x光片图像进行2d-3d配准,得到rx,rx,ry,rz,tx,ty,tz 6个参数,其中,rx,ry,rz,tx,ty,tz分别代表术前ct图像在ct坐标系的x、y、z三个轴向上的旋转分量与平移分量;
21、通过drr算法以及配准结果,计算得到术前选取的粗配准点在当前x光片图像上的位置坐标,其中drr算法为数字重建放射影像;
22、拍摄另一角度的待手术部位的x光片,两次拍摄角度与影像标定中拍摄影像标定工具时保持一致,重复上述步骤,分别得到粗配准点在两张待手术部位的x光片图像上的坐标,也即粗配准点在两个不同角度下的x光片图像坐标系下的坐标,分别记为c1,c2。
23、进一步地,所述对术前ct图像与术中待手术部位的x光片图像进行2d-3d配准采用自动配准,包括以下步骤:
24、生成术前ct图像的drr图像,其中drr图像为数字重建放射影像图像;
25、以生成的drr图像与术中拍摄的待手术部位的x光片图像的相似度作为目标函数,使用优化算法来迭代优化rx,ry,rz,tx,ty,tz这6个参数,使得相似度达到某一设定的阈值时即认为配准成功;
26、其中,drr图像与术中拍摄的待手术部位的x光片图像的相似度函数采用互信息或者归一化互相关中的一种,迭代优化6个参数时采用的优化算法是powell算法或者nelder-mead算法中的一种。
27、进一步地,s104中所述粗配准,基于三角测量法对待手术部位的x光片图像上的粗配准点进行三维重建,并与术前选取的粗配准点进行粗配准,包括以下步骤:
28、根据待手术部位阵列坐标系到两个不同角度下的x光片图像坐标系之间的投影矩阵p1,p2和粗配准点在两个不同角度下的x光片图像坐标系下的坐标c1,c2,基于三角测量法对两张待手术部位的x光片图像上的粗配准点进行三维重建,得到粗配准点在待手术部位阵列坐标系下的坐标,记为cpatient;
29、将粗配准点在ct坐标系下的坐标记为cct,根据点对匹配计算得到粗配准的结果,即ct坐标系到待手术部位阵列坐标系的转换矩阵,记为tct2patient。
30、进一步地,计算粗配准的结果时采用的点对匹配采用最小二乘法。
31、进一步地,s105中所述精配准,对术前分割得到的脊椎模型进行降采样,将降采样后的点投影至x光片图像上,再利用投影矩阵进行三维重建,得到待手术部位阵列坐标系下的脊椎点云,并通过icp点云配准算法与术前分割得到的脊椎模型进行配准,得到最终的脊柱配准结果,包括以下步骤:
32、对术前分割得到的脊椎模型的顶点进行降采样;
33、将降采样后的点投影至两个不同角度下的x光片图像上,得到降采样后的点在两个不同角度下的x光片图像坐标系下的坐标,记为f1、f2;其中,两次投影角度与影像标定中拍摄影像标定工具时保持一致;
34、基于三角测量法对两张x光片图像上的降采样后的点进行三维重建,并根据待手术部位阵列坐标系到两个不同角度下的x光片图像坐标系之间的投影矩阵p1,p2,得到降采样后的点在待手术部位阵列坐标系下的坐标,记为fpatient;
35、使用icp点云配准算法,以ct坐标系到待手术部位阵列坐标系的转换矩阵tct2patient作为初始位姿,对fpatient和脊椎模型进行点云配准;
36、不断优化tct2patient,得到最终的配准结果,即ct坐标系到待手术部位阵列坐标系的转换关系tct2patient。
37、第二方面,本发明提供一种脊柱配准装置,该装置包括:图像分割与粗配准点选取模块、影像标定模块、ct-x光配准模块、脊柱配准模块,其中,脊柱配准模块包括粗配准模块和精配准模块。
38、图像分割与粗配准点选取模块,用于对术前ct图像进行分割,获得脊椎的三维模型,并在三维模型上选取粗配准点;
39、影像标定模块,使用影像标定工具对c型臂拍摄的x光片进行标定,获取待手术部位阵列坐标到x光片图像坐标的投影矩阵;
40、ct-x光配准模块,用于对术前ct图像与术中拍摄的待手术部位的x光片图像进行2d-3d配准,并利用配准结果和drr算法获取术前选取的粗配准点在x光片图像上的坐标;
41、粗配准模块,基于三角测量法对待手术部位的x光片图像上的粗配准点进行三维重建,并与术前选取的粗配准点进行粗配准;
42、精配准模块,用于对术前分割得到的脊椎模型进行降采样,将降采样后的点投影至x光片图像上,再利用投影矩阵进行三维重建,得到待手术部位阵列坐标系下的脊椎点云,并通过icp点云配准算法与术前分割得到的脊椎模型进行配准,得到最终的脊柱配准结果。
43、第三方面,本发明提供一种脊柱配准设备,所述设备包括:处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序指令,其中,所述处理器用于执行存储器中存储的计算机程序指令,以实现上述所述脊柱配准方法。
44、第四方面,本发明提供一种脊柱配准计算机存储介质,所述计算机存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现上述所述脊柱配准方法。
45、本发明提供一种脊柱配准方法、装置、设备及存储介质,与现有技术相比较,具有以下优点:
46、通过影像标定模块建立起待手术部位阵列坐标系与x光片图像坐标系之间的关系,不依赖于c臂机本身的参数,因此可以适配任何厂商、任何型号的c型臂;
47、对两个角度的x光上的匹配点进行三维重建,再进行点云配准获得ct坐标系到待手术部位阵列坐标系的转换关系,可以用于进行机器人手术导航;
48、术中使用c臂机拍摄x光影像,相比拍摄术中ct的方案,具有辐射剂量低、操作简单、耗时短的优点;
49、配准是基于单个脊椎进行的,因此避免了术前ct与术中x光拍摄时病人姿态发生变化的问题,同时由于脊椎是骨质结构,不会像软组织一样发生形变,可以视为刚性变换来进行配准,避免了形变带来的问题。
- 还没有人留言评论。精彩留言会获得点赞!