穿戴式手功能康复训练机器人的制作方法
本发明涉及医疗设备,具体为穿戴式手功能康复训练机器人。
背景技术:
1、目前市场上中风导致的手功能障碍患者缺乏康复设备,大约75%脑卒中者在发病后会留下不同程度的后遗症,在众多的后遗症中,以偏瘫发生率最高,在偏瘫的康复中,又以手功能的康复最为困难,市面上基本都是主机和手套是分开的,且市面上的手套屈伸时都会手指跑偏,同时,市面上的手套屈伸时都会脱落,为此,我们提出穿戴式手功能康复训练机器人。
技术实现思路
1、本发明的目的在于提供穿戴式手功能康复训练机器人,以解决上述背景技术中提出的问题。
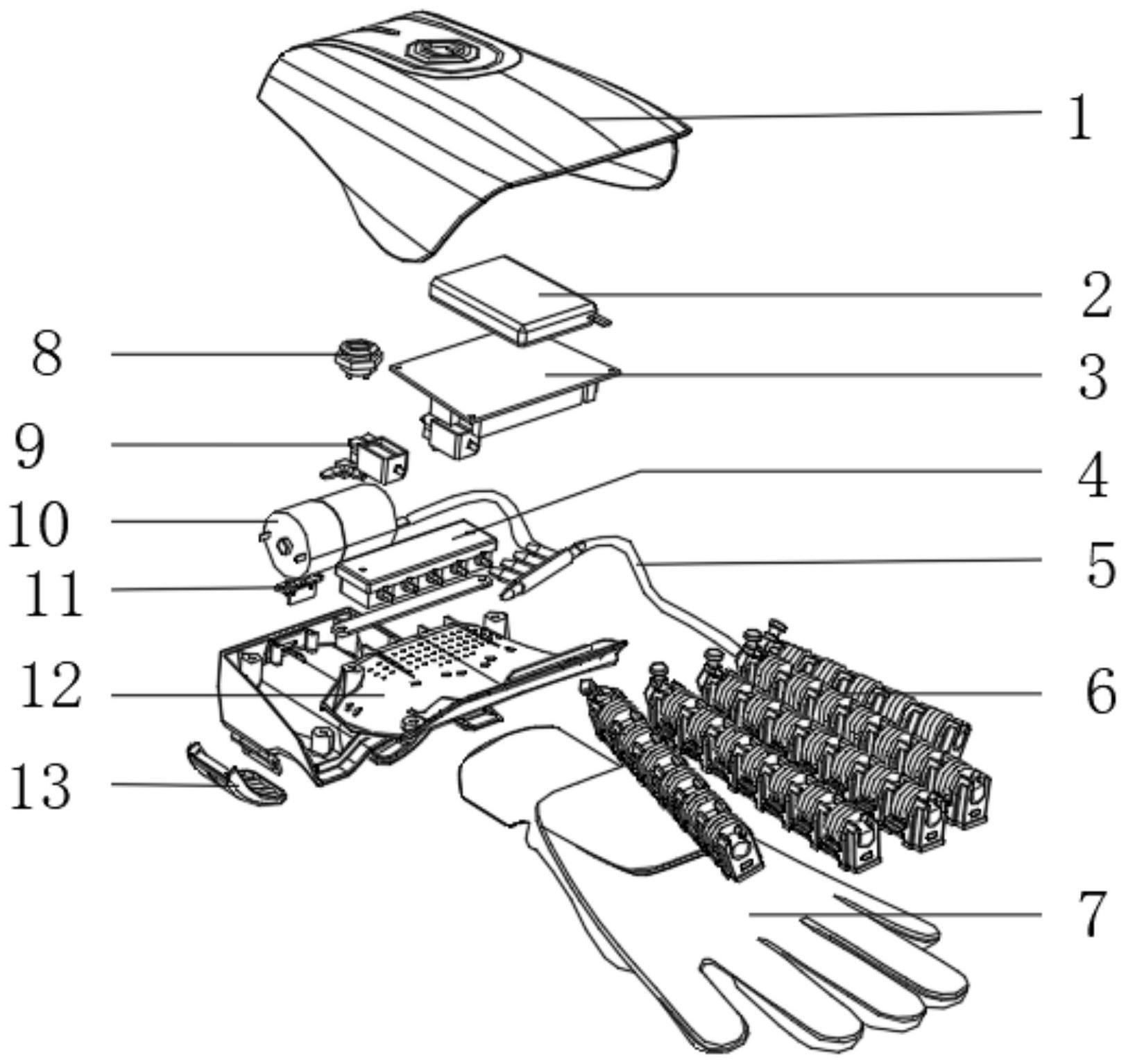
2、为实现上述目的,本发明提供如下技术方案:穿戴式手功能康复训练机器人,包括上盖和下盖,所述下盖的底部设置有手套,下盖的顶部固定连接有气泵,且气泵的输出端通过第一分流管连通有防止手指偏离塑料连轴机构及波纹管,所述下盖顶部的外侧固定连接有上盖,且下盖的外侧固定连接有固定的手腕的活页装置,且固定的手腕的活页装置包括阻尼活页和压住手腕结构。
3、优选的,所述防止手指偏离塑料连轴机构及波纹管包括第二分流管、塑料连轴结构、波纹管、手指和手套表面,第二分流管的末端与第一分流管连通,手指的表面设置有多个塑料连轴结构和波纹管,第二分流管延伸至最外侧的波纹管处,且手指的外侧设置有手套表面。
4、优选的,所述气泵与第一分流管之间设置有两位两通电磁阀和两位三通电磁阀。
5、优选的,所述上盖的顶部固定连接有电源开关,且上盖的外侧开设有充电口。
6、优选的,所述上盖的底部固定连接有电池,且下盖的顶部固定连接有电路板。
7、优选的,所述阻尼活页的外侧设置有压住手腕结构,且阻尼活页和压住手腕结构的数量均为两个。
8、与现有技术相比,本发明的有益效果如下:
9、本发明设置了上盖、第一分流管、防止手指偏离塑料连轴机构及波纹管、气泵、下盖和固定的手腕的活页装置,可带动手指弯曲使手指做屈伸运动实现康复,由于市面上基本都是主机和手套是分开的,而本发明做的是两者的结合,更加方便易用,并能做到随时随地可训练,既保证手指的正常屈伸,也可以防止跑偏,同时,还能防止训练时手套脱落。
技术特征:
1.穿戴式手功能康复训练机器人,包括上盖(1)和下盖(12),其特征在于:所述下盖(12)的底部设置有手套(7),下盖(12)的顶部固定连接有气泵(10),且气泵(10)的输出端通过第一分流管(5)连通有防止手指偏离塑料连轴机构及波纹管(6),所述下盖(12)顶部的外侧固定连接有上盖(1),且下盖(12)的外侧固定连接有固定的手腕的活页装置(13),且固定的手腕的活页装置(13)包括阻尼活页(131)和压住手腕结构(132)。
2.根据权利要求1所述的穿戴式手功能康复训练机器人,其特征在于:所述防止手指偏离塑料连轴机构及波纹管(6)包括第二分流管(61)、塑料连轴结构(62)、波纹管(63)、手指(64)和手套表面(65),第二分流管(61)的末端与第一分流管(5)连通,手指(64)的表面设置有多个塑料连轴结构(62)和波纹管(63),第二分流管(61)延伸至最外侧的波纹管(63)处,且手指(64)的外侧设置有手套表面(65)。
3.根据权利要求1所述的穿戴式手功能康复训练机器人,其特征在于:所述气泵(10)与第一分流管(5)之间设置有两位两通电磁阀(4)和两位三通电磁阀(9)。
4.根据权利要求1所述的穿戴式手功能康复训练机器人,其特征在于:所述上盖(1)的顶部固定连接有电源开关(8),且上盖(1)的外侧开设有充电口(11)。
5.根据权利要求1所述的穿戴式手功能康复训练机器人,其特征在于:所述上盖(1)的底部固定连接有电池(2),且下盖(12)的顶部固定连接有电路板(3)。
6.根据权利要求1所述的穿戴式手功能康复训练机器人,其特征在于:所述阻尼活页(131)的外侧设置有压住手腕结构(132),且阻尼活页(131)和压住手腕结构(132)的数量均为两个。
技术总结
本发明公开了穿戴式手功能康复训练机器人,包括上盖和下盖,所述下盖的底部设置有手套,下盖的顶部固定连接有气泵,且气泵的输出端通过第一分流管连通有防止手指偏离塑料连轴机构及波纹管,所述下盖顶部的外侧固定连接有上盖,且下盖的外侧固定连接有固定的手腕的活页装置。本发明设置了上盖、第一分流管、防止手指偏离塑料连轴机构及波纹管、气泵、下盖和固定的手腕的活页装置,可带动手指弯曲使手指做屈伸运动实现康复,由于市面上基本都是主机和手套是分开的,而本发明做的是两者的结合,更加方便易用,并能做到随时随地可训练,既保证手指的正常屈伸,也可以防止跑偏,同时,还能防止训练时手套脱落。
技术研发人员:颜国仁,梁权攀,陈风凯,罗晓涛,曾琳
受保护的技术使用者:广东今甲机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!