基于生化检验大数据的智能指挥车及其控制系统的制作方法
本发明属于健康查体,具体地说,涉及基于生化检验大数据的智能指挥车及其控制系统。
背景技术:
1、因突发意外事故时有发生,造成人员受伤后需要进行紧急救治,医院接收到事故信息后,立刻派遣医疗车前往事故地点,医疗车到达事故地点后,需要立即对患者进行身体检查,根据患者身体检查结果,医护人员可以在现场对患者进行急救处理,然后将患者迅速送往医院,或者医护人员可以根据医疗车内部的设施对患者进行手术,但是现实情况中,医疗车内部的设施较为简单,将患者送往医院进行手术是更好的选择,但是经常出现人员受伤的情况后,难以判断对患者直接进行手术,还是对患者进行简单处理后再送往医院,一般情况下,医生根据对患者的检测数据后进行判断是否送往医院,现有技术中,出现了帮助医生进行辅助诊断的系统。
2、例如,申请公开号为cn110136826a的专利公开了基于深度学习的智能医疗辅助诊断系统,该系统包括了ct仪器、血液化验检测仪和辅助诊断模块,辅助诊断模块根据ct影像和血检分析结果以及数据库分析患病概率,上述系统虽然可以帮助医生进行诊断,但是还存在以下缺陷:
3、上述专利应用在医院或诊所,这样相对稳定的环境中,不需要将患者进行转运,而医疗车在事故发生后,会快速的前往事故地点并且对患者进行救治,对于一些道路建设并不是十分完善的地区,那么医疗车到达事故地点后,医生根据自身经验以及检测出的数据判断出患者可以送往医院,以便得到更好的治疗后,医疗车将患者送往医院的过程中,由于路面凹凸不平,那么医疗车在行进过程中晃动的幅度较大,患者也会随着医疗车进行晃动,容易造成患者受到二次伤害,上述系统没有考虑患者晃动的因素,同时上述系统只能辅助医生进行初步诊断,无法做出将患者是否送往医院的决策。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、为解决上述问题,本发明采用如下的技术方案。
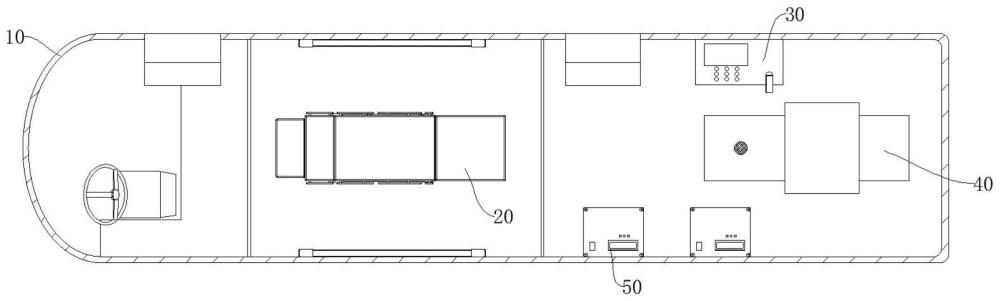
3、基于生化检验大数据的智能指挥车,包括指挥车主体,指挥车主体内部设置有手术台、x光检测台、尿液检测仪、血液检测仪、加速度检测模块、惯性系数生成模块、风险系数生成模块和指示模块;
4、振动检测器,设置于手术台的表面,用于获取智能指挥车行进过程中手术台的振动幅度值;
5、加速度检测模块,用于获取智能指挥车行进过程中的加速度值;
6、x光检测台,用于获取病患的x光图像;
7、体重检测器,设置于x光检测台的顶端,用于获取病患在平躺状态下的体重信息;
8、惯性系数生成模块,基于振动幅度值、加速度值和体重信息生成二次伤害系数;
9、尿液检测仪,用于获取病患的尿检数据,并生成尿液检测系数;
10、血液检测仪,获取病患的化验数据,并生成化验检测系数;
11、风险系数生成模块,将x光图像量化生成内部损伤系数,根据内部损伤系数、化验检测系数和尿检检测系数生成初始风险系数;
12、指示模块,将初始风险系数和二次伤害系数输入到风险分类模型中,输出指令类别。
13、优选地,二次伤害系数的生成公式包括:
14、
15、式中,sic为二次伤害系数,vad为振动幅度值,vae为加速度值,wit为体重信息,u1、u2和u3均为权重因子,且u1、u2和u3均大于0。
16、优选地,尿检数据包括尿液比重、尿液ph值和尿液透明度,生成尿液检测系数的公式包括:
17、
18、式中,uts为尿液检测系数,usg为尿液比重实测值,usgre为尿液比重标准值,urp为尿液ph实测值,urpre为尿液ph标准值,uty为尿液透明度实测值,utyre为尿液透明度标准值,w1、w2和w3均为权重因子,且w1、w2和w3均大于0。
19、优选地,化验数据包括血红蛋白浓度、白细胞计数和葡萄糖浓度,生成化验检测系数的公式包括:
20、
21、式中,ltp为化验检测系数,hb为血红蛋白浓度实测值,hbre为血红蛋白浓度标准值,wbc为白细胞计数实测值,wbcre为白细胞计数标准值,glu为葡萄糖浓度,glure为葡萄糖浓度标准值,f1、f2和f3均为权重因子,且f1、f2和f3均大于0。
22、优选地,将x光图像量化逻辑包括:
23、将x光图像进行预处理,所述图像预处理过程包括图像去噪和图像增强;
24、将预处理后的x光图像进行灰度处理,并获取x光图像中每个像素点的灰度值;
25、基于预设灰度阈值将每个像素点进行聚类,形成第一区域、第二区域、第三区域和第四区域;
26、遍历第一区域内的像素点和第三区域内的像素点,根据第一区域内像素点的数量形成肿块面积,根据第三区域内像素点的数量形成骨骼裂缝面积,基于肿块面积和骨骼裂缝面积生成内部损伤系数。
27、优选地,形成第一区域、第二区域、第三区域和第四区域的方法包括:
28、灰度阈值包括第一灰度阈值、第二灰度阈值和第三灰度阈值,将每个像素点的灰度值与第一灰度阈值、第二灰度阈值和第三灰度阈值进行对比;
29、若灰度值≥第一灰度阈值,则该像素点处于第一区域内;
30、若第一灰度阈值>灰度值≥第二灰度阈值,则该像素点处于第二区域内;
31、若第二灰度阈值>灰度值≥第三灰度阈值,则该像素点处于第三区域内;
32、若灰度值≥第三灰度阈值,则该像素点处于第四区域内。
33、优选地,内部损伤系数的生成公式为:
34、
35、式中,ijx为内部损伤系数、tma为肿块面积、bfa为骨骼裂缝面积。
36、优选地,生成初始风险系数的逻辑为:
37、irc=ln(a1×uts+a2×ltp+a3×ijx);
38、式中,irc为初始风险系数、uts为尿液检测系数、ltp为化验检测系数、ijx为内部损伤系数,a1、a2、a3均为权重因子,且a1、a2、a3均大于0。
39、优选地,指令类别包括手术指令和转运指令,风险分类模型的训练过程为:获取i组数据,i为大于1的正整数,数据包括初始风险系数、二次伤害系数和指令类别,将初始风险系数、二次伤害系数和指令类别作为样本集,将样本集划分为训练集和测试集,构建分类器,将训练集中的初始风险系数和二次伤害系数作为输入数据,将训练集中的指令类别作为输出数据,对分类器进行训练,得到初始分类器,利用测试集对初始分类器进行测试,输出满足预设准确度的分类器作为风险分类模型。
40、基于生化检验大数据智能指挥车的控制系统,配置于上述基于生化检验大数据的智能指挥车中,所述系统包括:
41、振动检测器,设置于手术台的表面,用于获取智能指挥车行进过程中手术台的振动幅度值;
42、加速度检测模块,用于获取智能指挥车行进过程中的加速度值;
43、x光检测台,用于获取病患的x光图像;
44、体重检测器,设置于x光检测台的顶端,用于获取病患在平躺状态下的体重信息;
45、惯性系数生成模块,基于振动幅度值、加速度值和体重信息生成二次伤害系数;
46、尿液检测仪,用于获取病患的尿检数据,并生成尿液检测系数;
47、血液检测仪,获取病患的化验数据,并生成化验检测系数;
48、风险系数生成模块,将x光图像量化生成内部损伤系数,根据内部损伤系数、化验检测系数和尿液检测系数生成初始风险系数;
49、指示模块,将初始风险系数和二次伤害系数输入到风险分类模型中,输出指令类别。
50、有益效果
51、相比于现有技术,本发明的有益效果为:
52、本发明根据振动幅度值、加速度值和体重信息生成二次伤害系数,接着通过对病患进行x光检测、尿液检测和血液检测分别计算了内部损伤系数、尿液检测系数和化验检测系数,并得出了初始风险系数,最后根据二次伤害系数和初始风险系数,得出了指令类别,指令类别包括手术指令和转运指令,若为手术指令,表明此时病患的身体状况结合路况并不适合进行转运,则医护人员需要在智能指挥车上直接对病患进行手术,若为转运指令,表明此时病患的身体状况结合路况能够进行转运,则医护人员可以对病患进行简单包扎后,再将病患转运至医院,这样将病患的身体状况和路况相结合,合理做出将患者是否送往医院的决策,既保证了病患能够得到更好的治疗机会,又能避免病患在转运的过程中,因为医疗车晃动而受到二次伤害,同时,若为转运指令,智能指挥车还能快速将其它伤员转运至医院,不必再等手术结束或者其它医疗车到达事故发生地,再进行后续的转运。
- 还没有人留言评论。精彩留言会获得点赞!