穿刺引导方法、设备及机器人系统与流程
本发明属于医疗器械,具体涉及一种穿刺引导方法、设备及机器人系统。
背景技术:
1、传统穿刺手术中,医生在ct影像的引导下将穿刺针刺破胸壁(或腹壁)并执行手术操作,可能的手术操作包括活检、粒子植入、放射消融等。ct成像因受扫描时间、成像方式、辐射等多种原因限制,通常无法与穿刺操作同步执行,因此,无法实时看到穿刺针位置变化。实际操作过程中,医生结合自身的临床经验来判断病灶的实际位置并进针,也就是说,整个穿刺过程依赖医生的技术水平、临床经验与团队的合作配合,这造成不同医疗机构之间的治疗效果存在较大差异。
2、近年来,穿刺机器人的应用实现了ct影像空间与手术空间的配准,其能够将病灶数字化,然后通过机械臂的定位后执行穿刺操作。这样的穿刺方式,可以减少ct的扫描次数和调针次数,能够提高穿刺成功率。但是,由于患者的呼吸运动会导致病灶移位,因此穿刺机器人在实现ct影像空间与手术空间统一的过程中会受到患者的呼吸运动的影响。如何保证机械臂定位穿刺位置与实际呼吸运动中病灶位置一致,一直是穿刺机器人应用技术中存在的难点。现有技术中,针对该问题的一般解决方案是在患者体表固定呼吸记录装置,通过呼吸记录装置采集患者在呼吸运动过程中的目标数据(例如腹压)变化来表征呼吸运动,之后在对ct影像空间与手术空间进行配准时,还与呼吸运动的目标数据关联,以确定实际中与ct影像相匹配的呼吸相位,进而确定最佳穿刺时间,使得机械臂定位的穿刺位置与实际呼吸运动中的病灶一致。
3、在患者体表固定呼吸记录装置,一方面影响患者的舒适度,另一方面还会对医生的操作空间产生干扰和限制,再一方面,呼吸记录装置通常为刚性或特定连接关系的标志物,其容易受到位移的影响而导致测量误差。
技术实现思路
1、本发明的目的在于提供一种穿刺引导方法、设备及机器人系统,旨在提供高精度的呼吸监测及穿刺引导的情况下,还改善患者的舒适度且减少对医生的操作空间的干扰和限制。
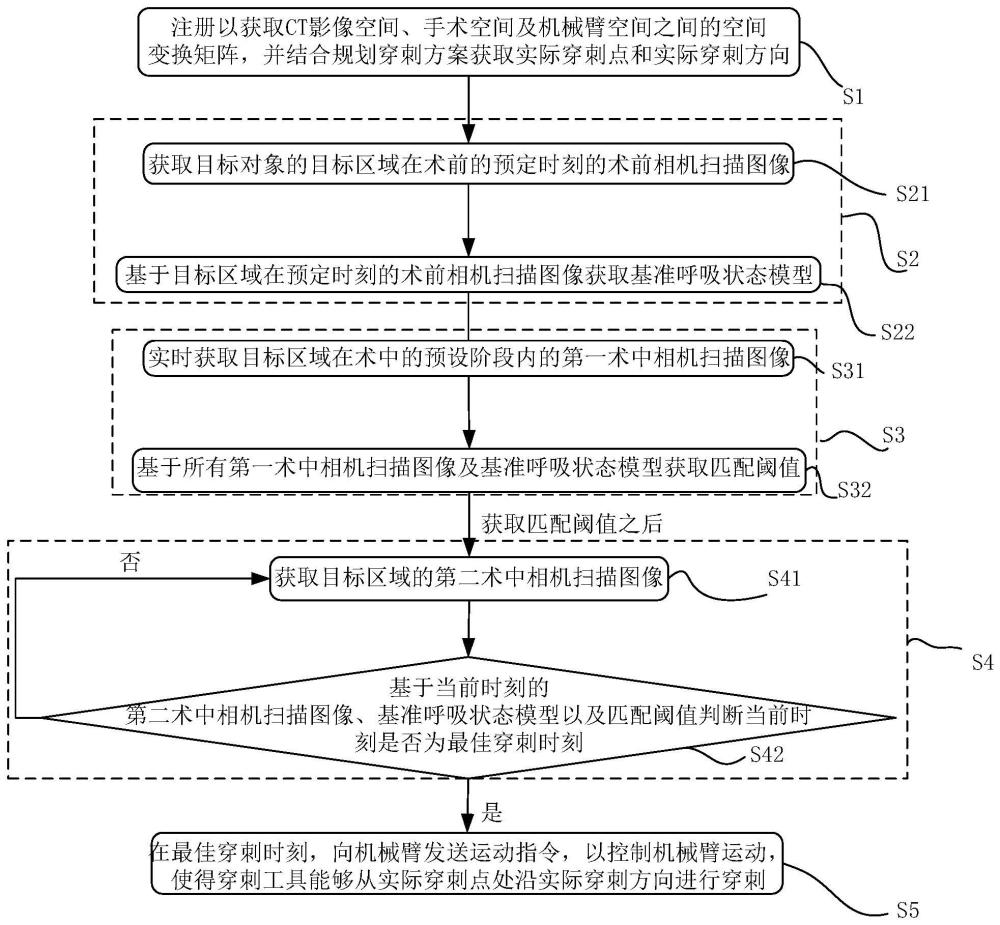
2、为实现上述目的,本发明提供了一种穿刺引导方法,包括:
3、采集目标对象的目标区域在术前的术前相机扫描图像,所述目标区域包括所述目标对象的肢体上随呼吸运动起伏的区域的至少一部分,所述术前相机扫描图像包括所述目标对象的呼吸状态数据;
4、基于所述术前相机扫描图像获取基准呼吸状态模型;
5、实时获取所述目标区域在术中的预设阶段内的第一术中相机扫描图像;
6、基于所有所述第一术中相机扫描图像及所述基准呼吸状态模型获取匹配阈值;
7、实时获取所述目标区域在获取所述匹配阈值之后的第二术中相机扫描图像;
8、基于当前时刻的所述第二术中相机图像、所述基准呼吸状态模型以及所述匹配阈值判断当前时刻是否为最佳穿刺时刻。
9、可选地,所述术前相机扫描图像包括术前扫描点云数据,所述术前扫描点云数据包括多个术前点对;
10、所述基于所述术前相机点云获取所述基准呼吸状态模型的步骤包括:
11、获取每个所述术前点对的点对特征;
12、基于所述点对特征对所有所述术前点对进行分类,得到多个点对集合,每个所述点对集合包括至少一个所述术前点对,且所有所述点对集合共同构成所述基准呼吸状态模型。
13、可选地,所述第一术中相机扫描图像包括第一术中扫描点云数据;所述基于所有所述第一术中相机点云及所述基准呼吸状态模型获取匹配阈值的步骤包括:
14、遍历所有所述第一术中扫描点云数据,获取每个所述第一术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数;
15、对所有所述第一术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数进行降序排列;
16、获取前n个所述第一术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数的平均值,以作为所述匹配阈值。
17、可选地,每个所述第一术中扫描点云数据包括多个术中点对;
18、获取所述第一术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数的步骤包括:
19、遍历所述第一术中扫描点云数据的所有所述术中点对,获取每个所述术中点对与所述基准呼吸状态模型之间的最优点对变换矩阵;
20、基于所述第一术中扫描点云数据的所有所述术中点对与所述基准呼吸状态模型之间的所述最优点对变换矩阵,获取所述第一术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数。
21、可选地,所述第二术中相机扫描图像包括第二术中扫描点云数据,所述第二术中扫描点云数据包括多个术中点对;
22、所述基于当前时刻的所述第二术中相机点云、所述基准呼吸状态模型以及所述匹配阈值判断当前时刻是否为最佳穿刺时刻的步骤包括:
23、遍历当前时刻的所述第二术中扫描点云数据的所有所述术中点对,获取每个所述术中点对与所述基准呼吸状态模型之间的最优点对变换矩阵;
24、基于所述第二术中扫描点云数据的所有所述术中点对与所述基准呼吸状态模型之间的所述最优点对变换矩阵,获取当前时刻的所述第二术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数;
25、比较当前时刻的所述第二术中扫描点云数据与基准呼吸状态模型之间的匹配参数是否大于所述匹配阈值,若是,则判定当前时刻为所述最佳穿刺时刻,若否,则判定当前时刻不是所述最佳穿刺时刻。
26、可选地,获取所述术中点对与所述基准呼吸状态模型之间的最优点对变换矩阵的步骤包括:
27、获取所述术中点对的点对特征;
28、基于所述点对特征,在所述基准呼吸状态模型中确定与所述术中点对相匹配的点对集合;
29、获取所述术中点对与对应的所述点对集合内的每个所述术前点对之间的点对变换矩阵;
30、获取每一种所述点对变换矩阵的出现次数,并以出现次数最多的所述点对变换矩阵作为所述术中点对与所述基准呼吸状态模型之间的最优点对变换矩阵;
31、基于术中扫描点云数据的所述术中点对与所述基准呼吸状态模型之间的所述最优点对变换矩阵获取所述术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数的步骤包括:
32、对所述术中扫描点云数据中的所有所述术中点对与所述基准呼吸状态模型之间的最优点对变换矩阵进行聚类,得到多个类;
33、对每个所述类中的每一种所述最优点对变换矩阵的出现次数进行累加,得到累加值;
34、对所有类的所述累加值进行比较,并以最大的所述累加值作为所述术中扫描点云数据与所述基准呼吸状态模型之间的匹配参数。
35、可选地,每个点对包括第一点和第二点;
36、所述点对特征包括所述第一点与所述第二点之间的距离、所述第一点的法向量与所述第二点的法向量所形成的夹角的角度、所述第一点的法向量与所述第一点及所述第二点的连线所形成的夹角的角度、所述第二点的法向量与所述第一点及所述第二点的连线所形成的夹角的角度中的至少一者。
37、可选地,在判定当前时刻为所述最佳穿刺时刻之后,所述穿刺引导方法还包括:
38、产生提示信息;以及,
39、使所述提示信息显示。
40、可选地,所述穿刺引导方法还包括:
41、在采集所述术前相机扫描图像的同时,还采集所述目标对象的所述目标区域的术前ct影像;
42、基于所述术前ct影像获取规划穿刺方案;
43、基于所述术前ct影像获取术前ct点云数据;
44、基于所述术前ct点云数据及所述术前相机点云数据,得到ct影像空间与手术空间之间的第一空间变换矩阵;
45、基于机械臂注册,获取所述手术空间与机械臂空间之间的第二空间变换矩阵;
46、基于第一空间变换矩阵、第二空间变换矩阵以及规划穿刺方案,确定实际穿刺点和实际穿刺方向;
47、在所述最佳穿刺时刻,基于所述实际穿刺点及所述实际穿刺方向控制机械臂运动。
48、为实现上述目的,本发明还提供了一种穿刺引导设备,包括相机和控制单元,其中:
49、所述相机用于对目标对象进行扫描,以获取所述目标区域的相机扫描图像;
50、所述控制单元与所述相机通信连接,并被配置用于执行如前所述的穿刺引导方法。
51、为实现上述目的,本发明还提供了一种穿刺引导机器人系统,包括相机、机械臂及控制单元;其中,
52、所述相机用于对目标对象的目标区域进行扫描,以获取所述目标区域的相机扫描图像;
53、所述机械臂的末端用于连接导向工具;
54、所述控制单元与所述相机及所述机械臂通信连接,被配置用于执行如前所述的穿刺引导方法。
55、与现有技术相比,本发明的穿刺引导方法、设备及机器人系统具有如下优点:
56、前述的穿刺引导方法包括:获取目标对象的目标区域在术前的术前相机扫描图像,所述目标区域为患者的肢体随呼吸运动起伏的区域的至少一部分,例如胸腹区域,所述术前相机扫描图像包括所述目标对象的呼吸状态数据;基于所述术前相机扫描图像获取基准呼吸状态模型;实时获取所述目标区域在术中的预设阶段内的第一术中相机扫描图像;基于所述第一术中相机图像及所述基准呼吸状态模型获取匹配阈值;实时获取所述目标区域在获取所述匹配阈值之后的第二术中相机扫描图像;基于当前时刻的所述第二术中相机扫描图像、所述基准呼吸状态模型以及所述匹配阈值判断当前时刻是否为最佳穿刺时刻。其中,术前相机扫描图像及术中相机扫描图像均可以直接反应目标对象的呼吸状态,利用与术前ct影像同时刻获取的术前相机扫描建立基准呼吸状态模型,然后在术中根据实时的术中相机扫描图像结合基准呼吸状态模型,可以找到与术前的预定时刻的呼吸状态最接近的呼吸态,从而确定与术前ct影像相匹配的时间以作为最佳穿刺时间,具有简单、直接且有效的优势,并且无需在患者体表固定呼吸记录装置,既提高患者的舒适度,也不会对手术空间造成干扰。此外,所述穿刺引导方法可存储于一计算机可读存储介质上,且应用有该计算机可读存储介质的穿刺引导系统中的各个设备均可直接采用现有设备,不需进行额外的附加工装,简化手术流程和场景,也避免额外工装对手术空间造成干扰。
- 还没有人留言评论。精彩留言会获得点赞!