一种呼吸随动控制方法、装置和控制器
本申请涉及机器人控制,尤其涉及一种呼吸随动控制方法、装置和控制器。
背景技术:
1、传统的肝脏、胸腔等部位的微波穿刺消融手术通常需要医师和患者同时暴露在放射环境中。为了避免医师遭受大规模的辐射环境影响,医师通常需要穿着极厚的金属铅制防护服。近年来,伴随着医疗机器人技术的发展,一些远程微波穿刺消融手术开始逐渐走进实际应用中。
2、用于远程微波穿刺消融手术的机器人通常由机械臂挂载穿刺针来执行消融手术。但是由于手术过程中,机器人末端的穿刺针通常为刚性的,而治疗部位通常位于胸腔、肝脏等部位。这样,在肝脏、胸腔等部位的远程微波穿刺消融手术过程中,由于人体的呼吸运动、以及潜在的因麻醉、温度等因素导致的人体肌肉痉挛抽动现象,容易造成刚性的穿刺针附近的皮肤撕伤,使得患者造成二次伤害。
3、因此,如何避免穿刺针与胸腔皮肤之间的相对运动对周围皮肤造成的二次伤害成为当前亟待解决的问题。
技术实现思路
1、有鉴于此,本申请提供一种呼吸随动控制方法、装置和控制器,用以实现呼吸随动,以避免穿刺针与胸腔皮肤之间的相对运动对周围皮肤造成的二次伤害。
2、具体地,本申请是通过如下技术方案实现的:
3、本申请第一方面提供一种呼吸随动控制方法,所述方法应用于控制器,所述控制器用于对机器人进行控制,所述机器人的机械臂的末端连接有多维力传感器,所述多维力传感器上设置有末端负载,所述末端负载包括夹持装置和夹持在所述夹持装置上的穿刺针;所述方法包括:
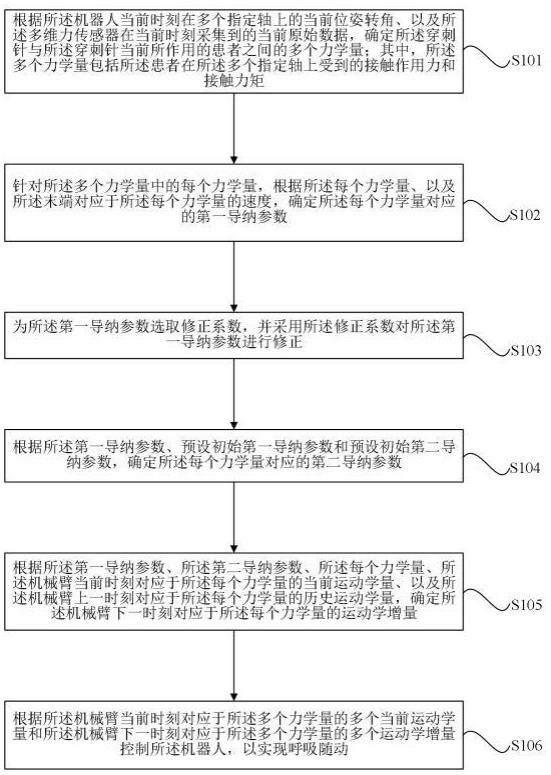
4、根据所述机器人当前时刻在多个指定轴上的当前位姿转角、以及所述多维力传感器在当前时刻采集到的当前原始数据,确定所述穿刺针与所述穿刺针当前所作用的患者之间的多个力学量;其中,所述多个力学量包括所述患者在所述多个指定轴上受到的接触作用力和接触力矩;
5、针对所述多个力学量中的每个力学量,根据所述每个力学量、以及所述末端对应于所述每个力学量的速度,确定所述每个力学量对应的第一导纳参数;
6、为所述第一导纳参数选取修正系数,并采用所述修正系数对所述第一导纳参数进行修正;
7、根据所述第一导纳参数、预设初始第一导纳参数和预设初始第二导纳参数,确定所述每个力学量对应的第二导纳参数;
8、根据所述第一导纳参数、所述第二导纳参数、所述每个力学量、所述机械臂当前时刻对应于所述每个力学量的当前运动学量、以及所述机械臂上一时刻对应于所述每个力学量的历史运动学量,确定所述机械臂下一时刻对应于所述每个力学量的运动学增量;
9、根据所述机械臂当前时刻对应于所述多个力学量的多个当前运动学量和所述机械臂下一时刻对应于所述多个力学量的多个运动学增量控制所述机器人,以实现呼吸随动。
10、本申请第二方面提供一种呼吸随动控制装置,所述装置应用于控制器,所述控制器用于对机器人进行控制,所述机器人的机械臂的末端连接有多维力传感器,所述多维力传感器上设置有末端负载,所述末端负载包括夹持装置和夹持在所述夹持装置上的穿刺针;所述装置包括确定模块、修正模块和控制模块:其中,
11、所述确定模块,用于根据所述机器人当前时刻在多个指定轴上的当前位姿转角、以及所述多维力传感器在当前时刻采集到的当前原始数据,确定所述穿刺针与所述穿刺针当前所作用的患者之间的多个力学量;其中,所述多个力学量包括所述患者在所述多个指定轴上受到的接触作用力和接触力矩;
12、所述确定模块,还用于针对所述多个力学量中的每个力学量,根据所述每个力学量、以及所述末端对应于所述每个力学量的速度,确定所述每个力学量对应的第一导纳参数;
13、所述修正模块,用于为所述第一导纳参数选取修正系数,并采用所述修正系数对所述第一导纳参数进行修正;
14、所述确定模块,还用于根据所述第一导纳参数、预设初始第一导纳参数和预设初始第二导纳参数,确定所述每个力学量对应的第二导纳参数;
15、所述确定模块,还用于根据所述第一导纳参数、所述第二导纳参数、所述每个力学量、所述机械臂当前时刻对应于所述每个力学量的当前运动学量、以及所述机械臂上一时刻对应于所述每个力学量的历史运动学量,确定所述机械臂下一时刻对应于所述每个力学量的运动学增量;
16、所述控制模块,用于根据所述机械臂当前时刻对应于所述多个力学量的多个当前运动学量和所述机械臂下一时刻对应于所述多个力学量的多个运动学增量控制所述机器人,以实现呼吸随动。
17、本申请第三方面提供一种控制器,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本申请第一方面提供的任一项所述方法的步骤。
18、本申请第四方面提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现本申请第一方面提供的任一项所述方法的步骤。
19、本申请提供的呼吸随动控制方法、装置和控制器,应用于控制器,所述控制器用于对机器人进行控制,所述机器人的机械臂的末端连接有多维力传感器,所述多维力传感器上设置有末端负载,所述末端负载包括夹持装置和夹持在所述夹持装置上的穿刺针。本申请提供的呼吸随动控制方法、装置和控制器,通过根据所述机器人当前时刻在多个指定轴上的当前位姿转角、以及所述多维力传感器在当前时刻采集到的当前原始数据,确定所述穿刺针与所述穿刺针当前所作用的患者之间的多个力学量;其中,所述多个力学量包括所述患者在所述多个指定轴上受到的接触作用力和接触力矩,并针对所述多个力学量中的每个力学量,根据所述每个力学量、以及所述末端对应于所述每个力学量的速度,确定所述每个力学量对应的第一导纳参数,进而为所述第一导纳参数选取修正系数,并采用所述修正系数对所述第一导纳参数进行修正,从而根据所述第一导纳参数、预设初始第一导纳参数和预设初始第二导纳参数,确定所述每个力学量对应的第二导纳参数,并根据所述第一导纳参数、所述第二导纳参数、所述每个力学量、所述机械臂当前时刻对应于所述每个力学量的当前运动学量、以及所述机械臂上一时刻对应于所述每个力学量的历史运动学量,确定所述机械臂下一时刻对应于所述每个力学量的运动学增量,最后根据所述机械臂当前时刻对应于所述多个力学量的多个当前运动学量和所述机械臂下一时刻对应于所述多个力学量的多个运动学增量控制所述机器人,以实现呼吸随动。这样,可通过多维力传感器实时采集原始数据,并基于原始数据计算出机器人的多个当前运动学量和下一时刻的多个运动学增量,进而基于当前运动学量和运动学增量控制机器人运动,可实现呼吸随动,以避免穿刺针与胸腔皮肤之间相对运动对周围皮肤造成的二次伤害。
技术特征:
1.一种呼吸随动控制方法,其特征在于,所述呼吸随动控制方法应用于控制器,所述控制器用于对机器人进行控制,所述机器人的机械臂的末端连接有多维力传感器,所述多维力传感器上设置有末端负载,所述末端负载包括夹持装置和夹持在所述夹持装置上的穿刺针;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述机器人当前时刻在多个指定轴上的当前位姿转角、以及所述多维力传感器在当前时刻采集到的当前原始数据,确定所述穿刺针与所述穿刺针当前所作用的患者之间的多个力学量,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述每个力学量、以及所述末端对应于所述每个力学量的速度,确定所述每个力学量对应的第一导纳参数,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述第一导纳参数、所述第二导纳参数、所述每个力学量、所述机械臂当前时刻对应于所述每个力学量的当前运动学量、以及所述机械臂上一时刻对应于所述每个力学量的历史运动学量,确定所述机械臂下一时刻对应于所述每个力学量的运动学增量,包括:
5.根据权利要求1所述的方法,其特征在于,所述为所述第一导纳参数选取修正系数,包括:
6.根据权利要求2所述的方法,其特征在于,所述多维力传感器的零力、以及所述末端负载在所述机器人坐标系下在所述多个指定轴上的第一重力分量的确定过程,包括:
7.一种呼吸随动控制装置,其特征在于,所述装置应用于控制器,所述控制器用于对机器人进行控制,所述机器人的机械臂的末端连接有多维力传感器,所述多维力传感器上设置有末端负载,所述末端负载包括夹持装置和夹持在所述夹持装置上的穿刺针;所述装置包括确定模块、修正模块和控制模块:其中,
8.根据权利要求7所述的装置,其特征在于,所述确定模块,具体用于:
9.一种控制器,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1-6任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现权利要求1-6任一项所述方法的步骤。
技术总结
本申请提供的呼吸随动控制方法,包括:根据机器人的当前位姿转角、以及多维力传感器的当前原始数据,确定穿刺针与穿刺针当前所作用的患者之间的多个力学量;针对每个力学量,根据每个力学量、以及末端对应于每个力学量的速度,确定第一导纳参数;为第一导纳参数选取修正系数,并采用修正系数对第一导纳参数进行修正;根据第一导纳参数、预设初始第一导纳参数和预设初始第二导纳参数,确定第二导纳参数;根据第一导纳参数、第二导纳参数、每个力学量、机械臂的当前运动学量、以及机械臂上一时刻的历史运动学量,确定机械臂下一时刻的运动学增量;根据机械臂的多个当前运动学量和机械臂下一时刻的多个运动学增量控制所述机器人,以实现呼吸随动。
技术研发人员:陶永,韩栋明,王奕儒,万嘉昊,高赫,刘海涛,薛蛟
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!