内窥镜手术辅助系统
本申请主要涉及医疗设备与医疗技术辅助,具体涉及一种内窥镜手术辅助系统。
背景技术:
1、消化道肿瘤是威胁人类健康的重大疾病,其早期发病隐匿,几乎无症状;而一旦有明显症状,则多已进入中晚期,患者预后极差,因此,早发现、早治疗是提高消化道肿瘤患者术后生存期的关键。消化内镜是筛查和治疗消化道早期肿瘤的一线工具,内镜下切除早期消化道肿瘤具备创伤较小、恢复较快的优点,避免了外科手术带来的显著创伤和痛苦。同时还可以通过内窥镜通过自然腔道或体内打孔的方式治疗胆囊结石、胆道结石,实现微创化治疗。
2、现有主流消化内镜具备柔性镜身、可插入额外器械孔道,联合外设治疗设备,可实现在内镜下手术过程,如对早期消化道肿瘤进行完整剥离,通过胃壁打孔以切除胆囊,以达到治疗目的。然而,消化道黏膜柔软、菲薄,病灶组织形态多变,组织血管结构交错复杂,这些因素大大增加了内镜下操作的难度,对医师的操作水平提出极高的要求。同时,在内镜介入手术过程中,内镜操作稍有不慎、病灶处理稍有不周,均会导致严重后果。另外,现有内镜结构的限制,使得手术过程存在手眼同步、仅限单器械操作等问题,手术空间局限、操作不够灵活,均影响内镜手术安全性。
3、因此,如何提高内镜的可操作性,降低内镜下手术操作难度,成为亟需解决的重大问题。
技术实现思路
1、本申请提供一种内窥镜手术辅助系统,旨在解决现有技术中内镜手术操作难度较高的问题。
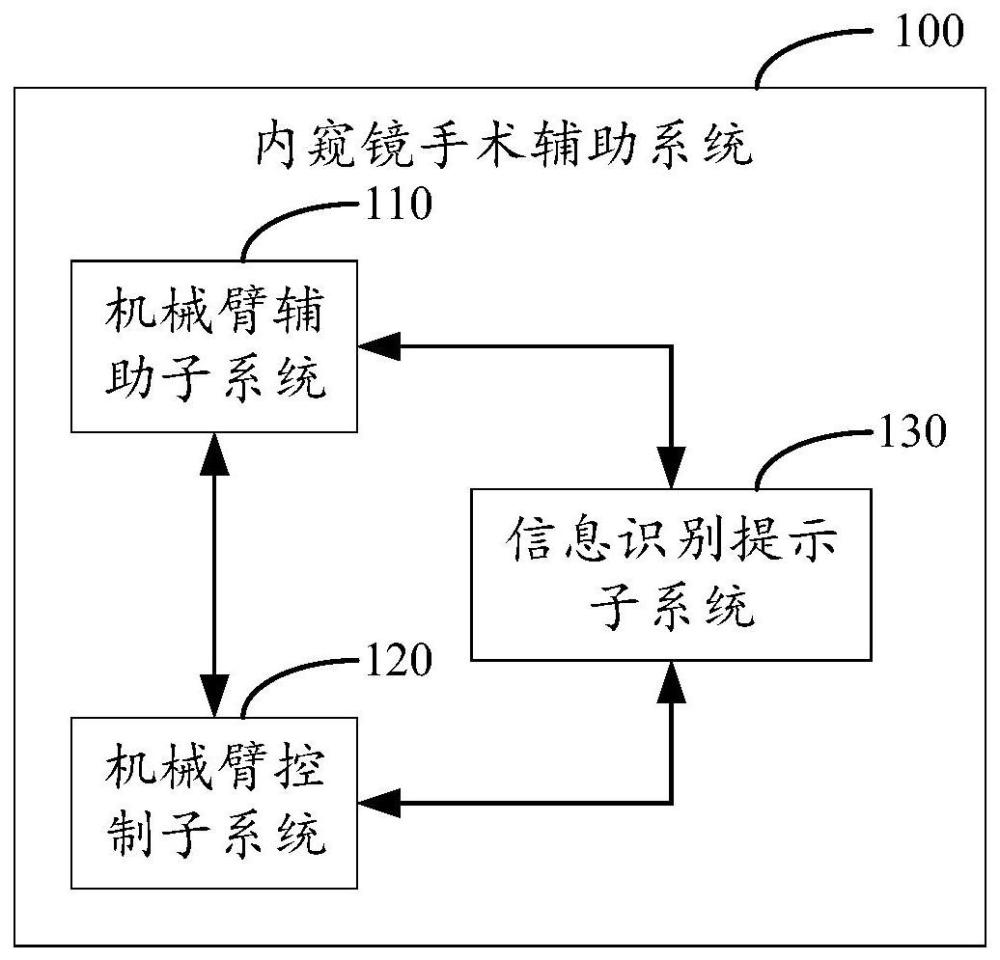
2、第一方面,本申请提供一种内窥镜手术辅助系统,包括:机械臂辅助子系统、机械臂控制子系统和信息识别提示子系统;
3、所述机械臂辅助子系统,用于固定和操控柔性机械臂;
4、所述机械臂控制子系统,用于获取输入的对所述柔性机械臂的操作信息,并基于所述操作信息控制所述柔性机械臂移动;
5、所述信息识别提示子系统,用于识别组织结构和确定手术区域,以及获取所述柔性机械臂所固定的手术工具的移动状态,其中,所述移动状态包括移动速度、移动方向以及所述手术工具的所处区域。
6、可选地,所述机械臂辅助子系统,还包括:
7、力度反馈模块,设置在所述柔性机械臂的一端,用于获取所述柔性机械臂在术中的应力值,并基于所述应力值进行计算和反馈;
8、触感反馈模块,设置在所述柔性机械臂的一端,用于获取所述柔性机械臂在术中的触感数据,并基于所述触感数据进行计算和反馈。
9、可选地,所述机械臂辅助子系统,包括:
10、柔性机械臂;
11、外套管装置,用于所述柔性机械臂和内窥镜通过进入体内,并固定所述内窥镜;
12、双气囊固定装置,与所述外套管装置联通,用于固定可充气柔性气囊。
13、可选地,所述外套管装置,包括:
14、主体腔道,用于内窥镜通过;
15、辅助孔道,用于所述柔性机械臂通过;
16、气体孔道,与所述可充气柔性气囊连通,用于基于所设置的压力指示器对所述可充气柔性气囊进行测压;
17、气囊装置,用于固定所述内窥镜。
18、可选地,所述信息识别提示子系统,包括:
19、解剖结构识别模块,用于获取内窥镜采集到的内镜图像,并对所述内镜图像进行结构识别,确定所述内镜图像所包含的结构信息;
20、可及范围确定模块,用于获取内窥镜采集到的内镜图像,并对所述内镜图像进行病灶分析和区域分割,确定所述内镜图像的手术区域。
21、可选地,所述解剖结构识别模块,包括:
22、第一标记子模块,用于对视频图像信息进行解码和归一化处理,并在完成处理时基于各图像所包含的结构进行分类和标注处理,得到第一样本图像;
23、第一建模子模块,用于构建结构识别模型,并基于所述第一样本图像对所述识别模型进行学习和训练,得到训练好的结构识别模型;
24、结构识别子模块,用于将内窥镜采集到的内镜图像输入至训练好的结构识别模型中,输出得到所述内镜图像所包含的结构信息。
25、可选地,所述可及范围确定模块,包括:
26、第二标记子模块,用于对视频图像信息进行解码和归一化处理,并在完成处理时基于各图像所包含的病灶信息进行标注处理,得到第二样本图像;
27、第二建模子模块,用于构建范围确定模块,并基于所述第二样本图像对所述范围确定模块进行学习和训练,得到训练好的范围确定模型;
28、范围确定子模块,用于将内窥镜采集到的内镜图像输入至训练好的范围确定模型中,输出得到所述内镜图像所对应的手术区域。
29、可选地,所述信息识别提示子系统,还包括:
30、数据分析子模块,用于根据识别处理得到的组织结果、手术区域和移动状态进行分析,生成提示信息;
31、提示反馈子模块,用于将所述提示信息进行反馈。
32、可选地,所述信息识别提示子系统,还包括:
33、信息显示子模块,用于将所述提示信息进行展示
34、可选地,所述柔性机械臂的主体结构为长管状。
35、本申请提供一种内窥镜手术辅助系统,该系统包括机械臂辅助子系统、机械臂控制子系统和信息识别提示子系统,在手术过程中通过机械臂辅助子系统将柔性机械臂进行固定,基于机械臂控制子系统获取相应的操作信息以对柔性机械臂移动,并且在手术过程中,利用信息识别提示子系统进行组织结构的识别和手术区域的确定,同时对柔性机械臂所固定的手术工具移动状态进行实时监控,以控制在手术区域内进行相关的处理,避免出现对其他正常组织的影响,提高了手术安全性和降低了手术操作的难度。
技术特征:
1.一种内窥镜手术辅助系统,其特征在于,所述系统包括:机械臂辅助子系统、机械臂控制子系统和信息识别提示子系统;
2.如权利要求1所述的系统,其特征在于,所述机械臂辅助子系统,还包括:
3.如权利要求1所述的系统,其特征在于,所述机械臂辅助子系统,包括:
4.如权利要求3所述的系统,其特征在于,所述外套管装置,包括:
5.如权利要求1所述的系统,其特征在于,所述信息识别提示子系统,包括:
6.如权利要求5所述的系统,其特征在于,所述解剖结构识别模块,包括:
7.如权利要求5所述的系统,其特征在于,所述可及范围确定模块,包括:
8.如权利要求1所述的系统,其特征在于,所述信息识别提示子系统,还包括:
9.如权利要求8所述的系统,其特征在于,所述信息识别提示子系统,还包括:
10.如权利要求1所述的系统,其特征在于,所述柔性机械臂的主体结构为管状。
技术总结
本申请提供一种内窥镜手术辅助系统,该系统包括:内窥镜手术辅助系统,其特征在于,该系统包括:机械臂辅助子系统、机械臂控制子系统和信息识别提示子系统;机械臂辅助子系统,用于固定和操控柔性机械臂;机械臂控制子系统,用于获取输入的对柔性机械臂的操作信息,并基于操作信息控制柔性机械臂移动;信息识别提示子系统,用于识别组织结构和确定手术区域,以及获取手术工具的移动状态,其中,移动状态包括移动速度、移动方向以及手术工具的所处区域。实现对解剖组织结构的识别以及手术区域的确定,通过对血管等正常组织的保护,提高手术安全性和降低手术操作难度。
技术研发人员:于红刚,董泽华,游航,吴练练,姚理文
受保护的技术使用者:武汉大学人民医院(湖北省人民医院)
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!