用于控制血管介入手术机器人的多端交互控制系统的制作方法
本申请涉及手术机器人,尤其涉及一种用于控制血管介入手术机器人的多端交互控制系统。
背景技术:
1、血管介入手术机器人是一种在血管介入手术中进行辅助的设备,由于血管介入手术需要在x射线环境中进行,因此血管介入手术机器人一般通过连接操控设备来进行远程控制。
2、在对血管介入手术机器人进行控制时,由系统将血管介入手术时的图像信息发送至主端显示器进行显示,再由操作者操作主端操作器以发送操作指令经主端显示器发送至从端显示器,再由从端显示器发送至器械递送控制器以完成主端操作器对血管介入手术机器人的操控。在实际通信时,主端操作器、主端显示器、从端显示器以及血管介入手术机器人之间均通过同一通信线路进行通信,由于主端操作器和血管介入手术机器人之间的通信线路距离较长,使得主端操作器传递到血管介入手术机器人的交互数据速度较慢,血管介入手术机器人在执行操作指令时的延迟较高,同时数据在传递过程容易出现数据发送错误的现象,不利于血管介入手术的顺利进行。
技术实现思路
1、本申请的目的在于提出一种用于控制血管介入手术机器人的多端交互控制系统,以解决手术时数据交互效率低,且容易产生交互错误的问题。
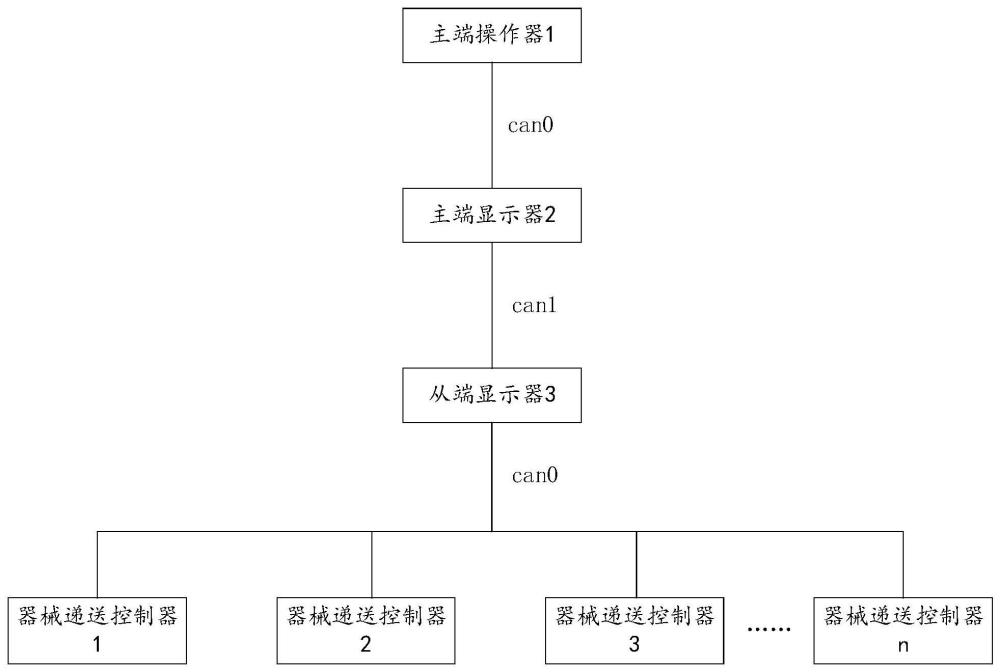
2、为了解决上述技术问题,本申请实施例提供一种用于控制血管介入手术机器人的多端交互控制系统,包括主端操作器、主端显示器、从端显示器、器械递送控制器;
3、所述主端操作器和所述主端显示器之间通过第一通信线路连接,所述主端显示器和所述从端显示器之间通过第二通信线路连接,所述从端显示器和所述器械递送控制器之间通过第三通信线路连接,使得数据交互过程中,所述主端操作器和所述主端显示器之间进行的数据交互,与所述从端显示器和所述器械递送控制器隔离;所述从端显示器和所述器械递送控制器之间进行的数据交互,与所述主端操作器和主端显示器隔离。
4、进一步的,在数据交互过程中,所述主端操作器、所述主端显示器、所述从端显示器、所述器械递送控制器中的任意一个作为源设备,生成交互数据,所述交互数据包括目标设备标识和源数据;所述源设备基于所述目标设备标识从连接的通信线路中确定目标通信线路,并通过所述目标通信线路将所述交互数据发送给当前接收设备,其中,所述当前接收设备为通过所述目标通信线路与所述源设备连接的设备;
5、所述当前接收设备接收到所述交互数据时,判断所述交互数据中的目标设备标识是否满足匹配结果;若所述目标设备标识满足匹配结果,则对所述源数据执行分发处理;若所述目标设备标识不满足匹配结果,则基于所述目标通信线路对所述交互数据进行转发处理。
6、进一步的,所述源设备还基于所述目标设备标识从所述主端操作器、所述主端显示器、所述从端显示器、所述器械递送控制器中确定目标通信设备,其中,所述目标通信设备为与所述目标通信标识对应的设备;
7、所述目标通信设备接收到所述交互数据时,根据所述源数据的数据操作类型以及注册的回调函数执行对应的数据处理操作。
8、进一步的,所述主端操作器设置有第一通信接口,所述器械递送控制器设置有第二通信接口,所述主端显示器和所述从端显示器均设置有第一通信接口和第二通信接口;
9、所述主端操作器的第一通信接口与所述主端显示器的第一通信接口之间连接第一通信线路;所述主端显示器的第二通信接口与所述从端显示器的第二通信接口之间连接第二通信线路;所述从端显示器的第一通信接口与所述器械递送控制器的第一通信接口之间连接第三通信线路。
10、进一步的,所述当前接收设备上设置有第一线程和/或第二线程对第一通信接口和/或第二通信接口进行数据监听;
11、所述当前接收设备根据所述目标设备标识确定数据接收接口和数据转发接口,并将与所述数据转发接口相连的通信线路作为目标通信线路,以通过所述目标通信线路转发所述交互数据至下一接收设备;所述下一接收设备重复所述当前接收设备的交互数据处理流程,直至所述交互数据中的目标设备标识满足匹配结果。
12、进一步的,所述交互数据按照第一传递方向或第二传递方向进行数据传递,其中,所述第一传递方向由所述主端操作器至所述主端显示器至所述从端显示器至所述器械递送控制器的顺序方向进行传递,所述第二传递方向由所述器械递送控制器至所述从端显示器至所述主端显示器至所述主端操作器的顺序方向进行传递。
13、进一步的,所述第一通信接口为can0接口,所述第二通信接口为can1接口;所述第一通信线路和第三通信线路为can0总线,所述第二通信线路为can1总线。
14、进一步的,在目标设备标识满足匹配结果时,所述当前接收设备对所述源数据执行分发处理,包括:所述当前接收设备对所述源数据进行数据提取处理,得到操作类型和操作信息;根据所述操作类型,对所述操作信息执行相应的操作;
15、其中,根据所述操作类型,对所述操作信息执行相应的操作,包括:
16、当所述数据操作类型为读类型,所述操作信息为目标地址,所述当前接收设备读取所述目标地址对应的操作数据;
17、当所述数据操作类型为写类型,所述操作信息为目标地址和变量信息,所述当前接收设备将所述变量信息写入所述目标地址。
18、进一步的,所述当前接收设备记录所述操作信息执行相应的操作的执行时间,并检测所述执行时间是否大于等于预设的响应阈值;
19、若所述执行时间大于等于所述响应阈值,则抛出响应超时结果;及
20、若所述执行时间小于所述响应阈值,则退出操作。
21、进一步的,判断所述目标设备标识是否满足匹配结果,包括:所述当前接收设备查询数据库,获取当前设备标识;对所述当前设备标识和所述目标设备标识进行匹配;若所述当前设备标识和所述目标设备标识相同,则所述目标设备标识满足匹配结果;若所述当前设备标识和所述目标设备标识不相同,则所述目标设备标识不满足匹配结果。
22、与现有技术相比,本申请实施例主要有以下有益效果:
23、本申请通过在主端操作器和主端显示器之间连接第一通信线路,在主端显示器和从端显示器之间连接第二通信线路,在从端显示器和器械递送控制器之间连接第三通信线路,从而使得数据交互过程中,主端操作器和主端显示器之间进行的数据交互,与从端显示器和器械递送控制器相隔离;从端显示器和器械递送控制器之间进行的数据交互,与主端操作器和主端显示器相隔离,以缩短数据传输时的传输距离,有效提高数据发送的效率,并且避免数据发送至无关设备对象,提高数据交互的准确性。
技术特征:
1.一种用于控制血管介入手术机器人的多端交互控制系统,其特征在于,包括主端操作器、主端显示器、从端显示器、器械递送控制器;
2.根据权利要求1所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,在数据交互过程中,所述主端操作器、所述主端显示器、所述从端显示器、所述器械递送控制器中的任意一个作为源设备,生成交互数据,所述交互数据包括目标设备标识和源数据;所述源设备基于所述目标设备标识从连接的通信线路中确定目标通信线路,并通过所述目标通信线路将所述交互数据发送给当前接收设备,其中,所述当前接收设备为通过所述目标通信线路与所述源设备连接的设备;
3.根据权利要求2所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,所述源设备还基于所述目标设备标识从所述主端操作器、所述主端显示器、所述从端显示器、所述器械递送控制器中确定目标通信设备,其中,所述目标通信设备为与所述目标通信标识对应的设备;
4.根据权利要求2所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,所述主端操作器设置有第一通信接口,所述器械递送控制器设置有第二通信接口,所述主端显示器和所述从端显示器均设置有第一通信接口和第二通信接口;
5.根据权利要求4所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,所述当前接收设备上设置有第一线程和/或第二线程对第一通信接口和/或第二通信接口进行数据监听;
6.根据权利要求2所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,所述交互数据按照第一传递方向或第二传递方向进行数据传递,其中,所述第一传递方向由所述主端操作器至所述主端显示器至所述从端显示器至所述器械递送控制器的顺序方向进行传递,所述第二传递方向由所述器械递送控制器至所述从端显示器至所述主端显示器至所述主端操作器的顺序方向进行传递。
7.根据权利要求4所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,所述第一通信接口为can0接口,所述第二通信接口为can1接口;所述第一通信线路和第三通信线路为can0总线,所述第二通信线路为can1总线。
8.根据权利要求2所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,在目标设备标识满足匹配结果时,所述当前接收设备对所述源数据执行分发处理,包括:所述当前接收设备对所述源数据进行数据提取处理,得到操作类型和操作信息;根据所述操作类型,对所述操作信息执行相应的操作;
9.根据权利要求8所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,所述当前接收设备记录所述操作信息执行相应的操作的执行时间,并检测所述执行时间是否大于等于预设的响应阈值;
10.根据权利要求1所述的用于控制血管介入手术机器人的多端交互控制系统,其特征在于,判断所述目标设备标识是否满足匹配结果,包括:所述当前接收设备查询数据库,获取当前设备标识;对所述当前设备标识和所述目标设备标识进行匹配;若所述当前设备标识和所述目标设备标识相同,则所述目标设备标识满足匹配结果;若所述当前设备标识和所述目标设备标识不相同,则所述目标设备标识不满足匹配结果。
技术总结
本申请属于手术机器人技术领域,涉及一种用于控制血管介入手术机器人的多端交互控制系统,包括主端操作器、主端显示器、从端显示器、器械递送控制器;所述主端操作器和所述主端显示器之间通过第一通信线路连接,所述主端显示器和所述从端显示器之间通过第二通信线路连接,所述从端显示器和所述器械递送控制器之间通过第三通信线路连接,使得数据交互过程中,所述主端操作器和所述主端显示器之间进行的数据交互,与所述从端显示器和所述器械递送控制器隔离;所述从端显示器和所述器械递送控制器之间进行的数据交互,与所述主端操作器和主端显示器隔离。本申请能够有效提高血管介入手术时数据交互的效率和准确性。
技术研发人员:黄军
受保护的技术使用者:深圳市爱博医疗机器人有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!