一种客车车底骨架梁截面厚度的多目标优化算法
本发明涉及一种客车车底骨架梁截面厚度的多目标优化算法,属于车辆骨架。
背景技术:
1、代理模型方法依靠计算硬件与软件的快速发展与数字模拟技术和优化理论的成熟而广泛应用于汽车轻量化领域。而目前在汽车领域中广泛使用的代理模型均为比较传统的kriging模型或者最为简单基础的多项式响应面模型。而对于客车模型而言,由于客车车底骨架中存在大量的梁结构,每一根梁结构的厚度以及截面形状都会对客车车底骨架的质量以及刚度、强度、模态等力学性能产生较大的影响,一方面大量的梁结构如果逐一优化将会造成巨大的工作量,另一方面对客车车底骨架大量的梁结构作为待设计的对象以及多种不同的厚度选择区间导致其显然是高维高度非线性的问题,大多数传统的代理模型在预测精度与预测稳定性两个方面下都很难得到保证,从而致使优化结果准确性不足等问题。
2、在灵敏度分析的过程中,由于客车车底骨架梁结构太多且排布复杂,如果采用传统的一次灵敏度分析并不能很好的筛选出需要优化的梁结构,故本方法采用了分步式灵敏度分析,能够更好的筛选出待优化的梁结构。另外,高斯过程回归模型相较于传统的代理模型,其能够通过置信区间直接反映出模型的精确程度。
3、同样的,在对客车骨架进行多目标优化时,搭建完成代理模型之后,涉及到对模型的寻优算法之抉择,由于客车结构优化属于高维度非线性的连续函数优化模型,遗传算法(ga)本身会由于整个种群均匀的朝向最优区域移动而导致其对最优解的搜索速度较慢,对于该种连续的函数优化模型而言,粒子群算法显然具备更加快速的最优解搜索能力,且不易于陷入局部最优解,显然可以被认为更加适合于模型本身。
4、故本发明通过对客车车底骨架的认识以及谨慎的考虑,认为分步式灵敏度分析对待优化梁结构的筛选是有效的。且高斯过程回归是高精度并具有高度稳定性的代理模型。通过对当前该领域内基于灵敏度分析以及传统代理模型以及配合优化算法使用的了解于调研,尚未有采用分步式灵敏度分析筛选梁结构后使用粒子群优化与高斯过程回归对客车结构实现多目标优化的优化方法。
技术实现思路
1、本发明设计开发了一种客车车底骨架梁截面厚度的多目标优化算法,在两次灵敏度分析的基础上利用高斯过程回归模型并结合粒子群算法对客车车底骨架进行多目标优化设计,降低客车车底骨架质量。
2、本发明提供的技术方案为:
3、一种客车车底骨架梁截面厚度的多目标优化算法,包括:
4、步骤一、将车底骨架中的前部与后部按照其厚度进行分组,并基于厚度分组进行第一次灵敏度分析,得到对质量敏感而对性能不敏感的梁组;
5、步骤二、对得到的梁组进行功能性分组,并对其进行第二次灵敏度分析,得到功能性相同的变量梁组;
6、步骤三、采用拉丁超立方设计对步骤二中得到的变量梁组进行采样,构建代理模型,设置添加具体的约束条件,依据目标以及约束进行多目标优化设计,采用高斯过程回归的模型并结合粒子群优化算法,在初始设计空间中对复杂系统进行最优拉丁超方试验生成初始样本点,并获得初始样本点处的目标函数f(x)和约束函数g(x);
7、步骤四、根据目标函数和约束函数,设置高斯随机过程核函数初始参数,模型训练方法为极大似然估计,依据初始样本进行回归模型超参数调优以及模型训练,采用共轭梯度法对超参数进行优化;
8、步骤五、基于粒子群算法进行寻优,得到优化后的设计变量取值。
9、优选的是,所述步骤一中,基于扭转柔度、弯曲柔度、一阶弯曲模态频率以及一阶扭转模态频率,以梁截面厚度的变化来观察上述参数的变化,设置灵敏度分析的目标函数为质量最小,约束最大应力小于客车车体骨架所用材料的许用应力进行直接灵敏度分析。
10、优选的是,所述步骤二中,将扭转工况柔度、弯曲工况柔度、一阶扭转模态、一阶弯曲模态的直接灵敏度分析结果与质量的灵敏度分析结果的比值作为相对灵敏度,求出了各个力学性能关于质量的相对灵敏度值。
11、优选的是,所述步骤三中,采样区间的下限设置为1mm,上限设置为各梁的原始厚度,设置添加具体的约束条件为:
12、客车整车骨架的一阶扭转模态频率大于等于4.5hz、及其一阶弯曲模态频率大于等于6.5hz;同时添加高斯过程回归模型预测值的置信区间以不小于0.95的概率包含fg(x)的期望,具体的变量分别为v2、v3、v8、v9、v10、v11、v12,得到如下的优化数学模型:
13、
14、式中,v为截面厚度,fm(v)为客车骨架与厚度的函数关系,ft(v)为客车整车骨架的一阶扭转模态频率与厚度的函数,fb(v)为客车整车骨架的一阶弯曲模态频率与厚度的函数关系,fkt(v)为客车骨架的扭转刚度与厚度的函数关系,fg(v)为高斯过程回归模型的预测函数设置,z0.025=1.96,t为矩阵的转置,s.t.为约束条件。
15、优选的是,还包括:
16、在初始设计空间中对复杂系统进行最优拉丁超方试验,生成初始样本点,并获得初始样本点处的目标函数f(x)和约束函数g(x);
17、f(x)=[f1(x),f2(x),...fj(x)...,fn(x)];
18、g(x)=[g1(x),g2(x),...gj(x)...,gt(x)];
19、在有限元求解后获得目标函数f(x)和约束函数g(x):
20、优选的是,所述步骤五包括:
21、设置粒子群规模为400,最大迭代次数800,并设置个体学习因子和社会学习因子均为2以及惯性因子为0.6,粒子的最大飞行速度为5;初始化粒子的飞行速度以及位置,使各粒子均匀分布在取值范围之内并且具有不同的速度方向进行寻优;
22、每一次迭代,都将会更新每个粒子的个体极值pbest以及全局极值gbest,并且下一轮迭代中每个粒子都将依据个体极值以及全局极值对自身的速度与位置进行调整,循环往复便可搜寻到全局最优解;
23、每个粒子的速度可以采用以下公式进行赋值迭代:
24、vi=vi+c1×rand()×(pbesti-xi)+c2×rand()×(gbesti-xi);
25、式中,第一项vi为惯性项,表达上一次迭代所使用的速度与位置对本次迭代的影响,第二项c1×rand()×(pbesti-xi)为自身认知项,为粒子的动作会收到自身极值的影响,第三项c2×rand()×(gbesti-xi)为群体认知项,为每一个粒子的下一步动作都会收到全局极值的影响,rand为介于(0,1)之间的随机数值,vi为i粒子当前的速度;c1和c2分别为个体学习因子和社会学习因子,取值为2。
26、优选的是,所述步骤五还包括:
27、在迭代完速度之后,使用下列公式对每个粒子的位置进行迭代:
28、xi=xi+vi;
29、式中,xi为i粒子当前的位置;当vi迭代到大于vmax时,vi=vmax;对于惯性项而言,通常会对惯性项vi乘以惯性因子,从而得到新的速度更新迭代式如下:
30、vi=ω×vi+c1×rand()×(pbesti-xi)+c2×rand()×(gbesti-xi)
31、设置惯性因子为:
32、
33、式中,gk为最大迭代次数,ωini为初始惯性次数,ωend迭代到最大进化代数为止的惯性权值;ωini=0.9,ωend=0.4;g为当前迭代次数。
34、本发明所述的有益效果:
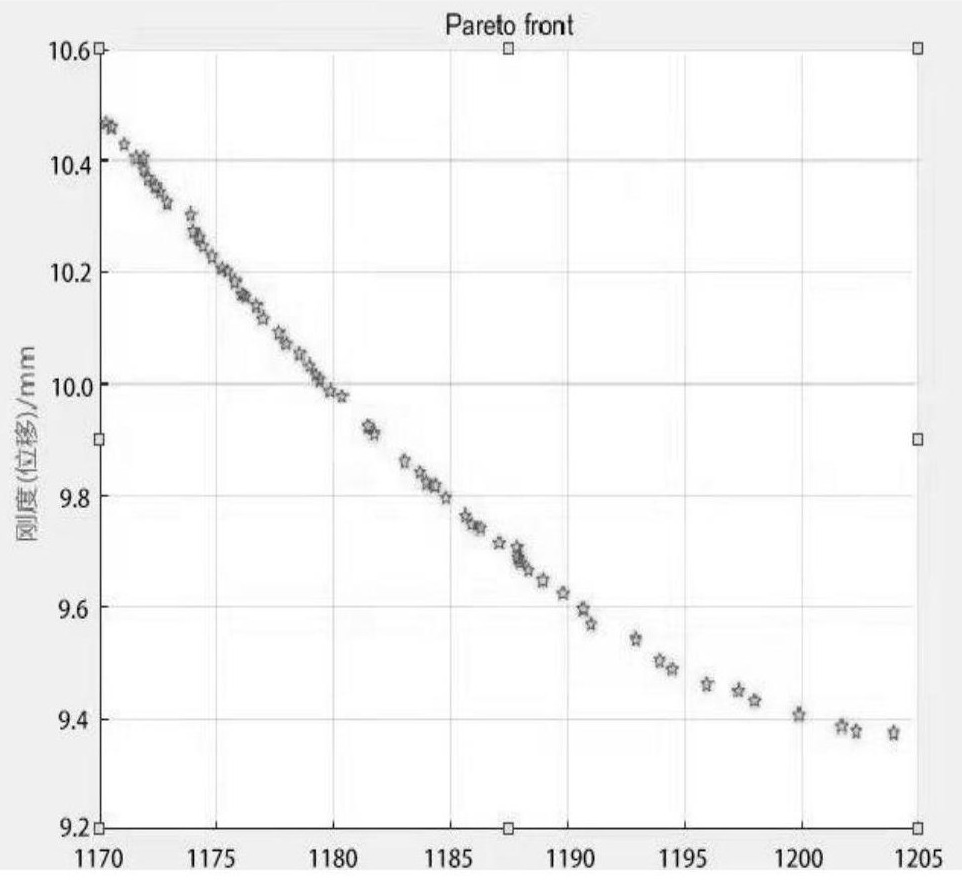
35、本发明设计方法研究了对于客车车底骨架采用分步式灵敏度分析,分两次对客车车底骨架的梁结构进行筛选,筛选出一批对质量敏感对性能不敏感的梁结构,并使用高斯过程回归模型作为代理模型建模并且使用粒子群优化算法进行寻优的厚度优化,只需获取少量抽样点,在逐步优化中更新样本点,加入样本点进行模型重构并进行多目标优化即可获得较为准确地pareto前沿。序列优化过程充分考虑了模型的误差信息,在多次建模的过程中实现优化结果的全局性提高;同时也缩短了仿真的时间和成本,且具备较好的准确率。最终,最终降低了客车车底骨架9.3%的质量。
- 还没有人留言评论。精彩留言会获得点赞!