一种助行器轮椅的随动助行控制系统的制作方法
本发明涉及康复辅助器具和移动助行,尤其涉及一种助行器轮椅的随动助行控制系统。
背景技术:
1、现有的电动助行器有辅助行走的功能,但是没有轮椅的乘坐移动功能;现有轮椅的控制系统可以满足使用者乘坐移动,但是对于腿脚不灵便、有行走需求的老年人,不能提供行走辅助,另外,控制系统安全控制还不完善,老年人容易跌倒。
2、为此,本发明提供了一种随动助行控制系统,用于助行器轮椅一体式设备,能够使助行器轮椅适应各种复杂路况,方便护理人员操作,可以满足各类残障者的出行需求。
技术实现思路
1、为实现本发明之目的,采用以下技术方案予以实现:
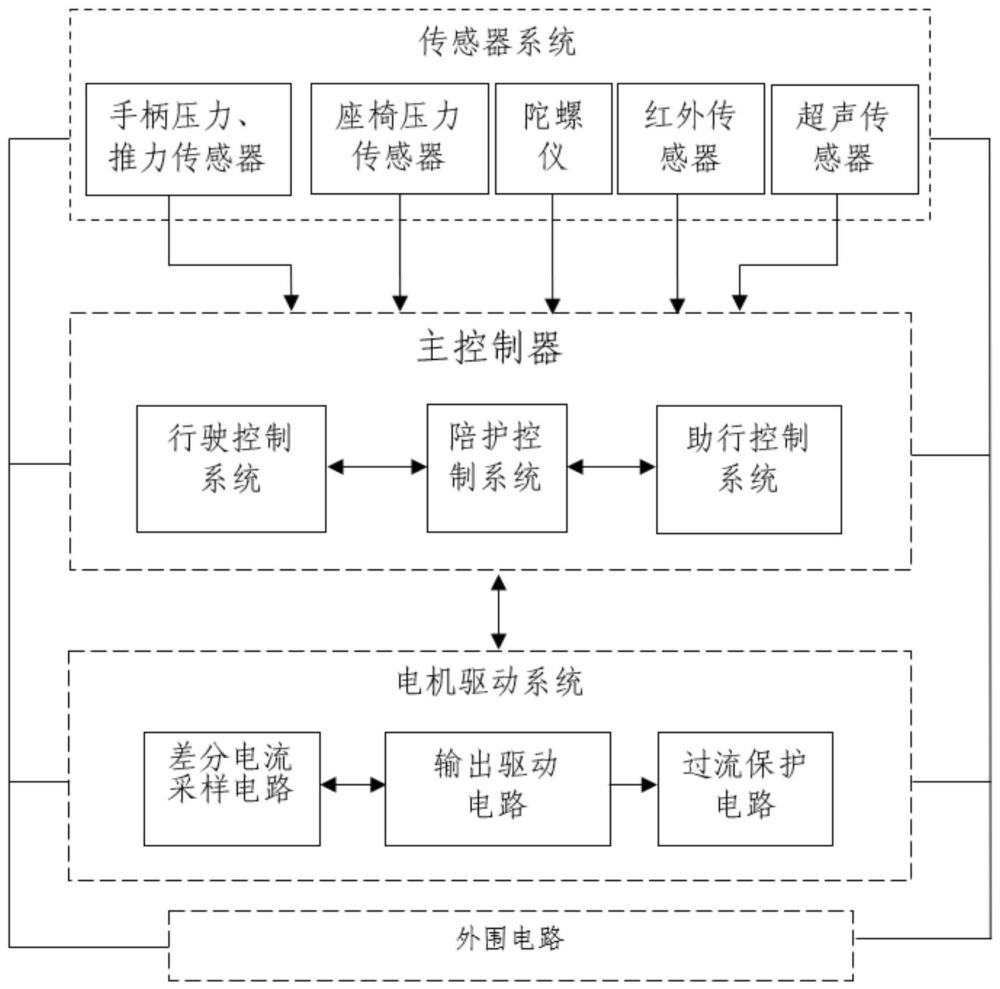
2、一种随动助行控制系统,包括主控制器、传感器系统和电机驱动系统,其中:主控制器包括行驶控制系统、助行控制系统、陪护控制系统;传感器系统包括手柄传感器、座椅压力传感器、红外传感器、陀螺仪、超声传感器;电机驱动系统包括输出驱动电路、过流保护电路、差分电流采样电路。
3、所述的随动助行控制系统,其中:手柄传感器位于助行器轮椅后端的手柄内,手扶着手柄产生压力,数值设为f1,手推手柄产生推力,数值设为f3;座椅压力传感器位于助行器轮椅座位上,有人坐下时,压力传感器产生电信号,数值设为f2;红外传感器有2个,分别位于后端扶手和座位,用于检测助行器轮椅的后端是否有人和检测助行器轮椅座位是否有人,设后端扶手的红外传感器数值为h1,座位上的红外传感器数值为h2;超声传感器位于助行器轮椅后端,用于检测助行器轮椅后方人员的距离,设超声传感器数值为c。
4、所述的随动助行控制系统,其中:当f1≠0,f2=0,h1=0,h2≠0,控制系统启动助行功能模式:
5、当手柄压力f1达到预设阈值f1a时,助行器轮椅的轮椅行驶状态为禁止,助行状态和陪护状态待启动,继续检测座位压力传感器数值f2,当f2=0时,助行状态启动;
6、f1≥f1a,电机启动,助行器轮椅向前行驶,此时再判断f3数值,当f3达到预设阈值f3a时,电机加速,按照f3大小同比例放大控制电机时速;
7、当f1达到预设阈值f1c时,f1a<f1c,随动助行控制系统判定此时状态为紧急情况,,手柄压力异常,系统制动;当f3达到预设阈值f3c时,f3a<f3c,随动助行控制系统判定此时状态为紧急情况,推力异常,摔倒风险加大,系统制动;
8、控制系统通过采样的手柄压力和推力数值,通过算法控制电机驱动系统,设陀螺仪测得受力方向与垂直线的夹角为φ,
9、设定此功能下的电机调速电流为it1,则有,
10、it1=π·a·f1/2arctanφ-b·f3
11、其中,a为电机驱动电流采样放大器放大系数,b为电机反馈电流采样放大器系数,f1为手柄压力,f3为手柄推力。
12、所述的随动助行控制系统,其中:当手柄压力传感器数值f1=0,f2≠0,h1≠0,h2=0,控制系统启动轮椅功能模式:
13、当座位压力f2达到预设阈值f2a时,助行器轮椅的助行状态为禁止,轮椅行驶状态和陪护状态待启动,继续检测手柄压力传感器数值f1,当f1=0时,行驶状态启动,当f1≠0时,陪护状态启动;
14、当f2达到预设阈值f2c时,f2a<f2c,随动助行控制系统判定此时状态为乘坐人坐轮椅的姿势不正确,系统制动;
15、f2≥f2a,电机启动,助行器轮椅向前行驶,此时再判断f1、f3数值,当f1和f3≠0,行驶控制器操作禁止;
16、控制系统通过采样的座位压力数值,根据算法控制电机驱动系统,设陀螺仪测得受力方向与垂直线的夹角为φ,
17、设定此功能下的电机调速电流为it2,则有,
18、it2=π·a·f2/2arctanφ=π·a·f2·cosφ/2arctanφ
19、其中,a为电机驱动电流放大器放大系数,f2为人体坐座位的压力,f2为f2垂直分力。
20、所述的随动助行控制系统,其中:当手柄压力传感器数值f1≠0,f2≠0,h1≠0,h2≠0,控制系统启动陪护功能模式:
21、当f2达到预设阈值f2c时,f2a<f2c,随动助行控制系统判定此时状态为乘坐人坐轮椅的姿势不正确,系统制动;
22、f2≥f2a,电机启动,助行器轮椅向前行驶,此时再判断f1、f3数值,当f1、f3≠0,行驶控制器操作禁止;
23、控制系统通过采样的手柄压力数值、座位压力数值,根据算法控制电机驱动系统,设陀螺仪测得受力方向与垂直线的夹角为φ,
24、设定此功能下的电机调速电流为it3,则有,
25、it3=π·a·f1/2arctanφ+π·a·f2·cosφ/2arctanφ-b·f3
26、其中,a为电机驱动电流采样放大器放大系数,b为电机反馈电流采样放大器系数,f1为手柄压力,f2为座位压力,f3为手柄推力。
27、所述的随动助行控制系统,其中:主控制芯片电路包括主控制器芯片u20。
28、所述的随动助行控制系统,其中:输出驱动电路包括驱动芯片u1和驱动芯片u3。
29、所述的随动助行控制系统,其中:差分电流采样电路包括第一差分电流采样电路和第二差分电流采样电路,第一差分电流采样电路和第二差分电流采样电路都包括运算放大器。
30、所述的随动助行控制系统,其中:过流保护电路包括比较器芯片。
技术特征:
1.一种助行器轮椅的随动助行控制系统,包括主控制器、传感器系统和电机驱动系统,其特征在于:主控制器包括行驶控制系统、助行控制系统、陪护控制系统;传感器系统包括手柄传感器、座椅压力传感器、红外传感器、陀螺仪、超声传感器;电机驱动系统包括输出驱动电路、过流保护电路、差分电流采样电路。
2.根据权利要求1所述的助行器轮椅的随动助行控制系统,其特征在于:差分电流采样电路包括第一差分电流采样电路和第二差分电流采样电路,第一差分电流采样电路和第二差分电流采样电路都包括运算放大器。
3.根据权利要求1所述的助行器轮椅的随动助行控制系统,其特征在于:过流保护电路包括比较器芯片。
4.根据权利要求1所述的助行器轮椅的随动助行控制系统,其特征在于:控制系统通过采样的手柄压力和推力数值,通过算法控制电机驱动系统。
5.根据权利要求1所述的助行器轮椅的随动助行控制系统,其特征在于:控制系统通过采样的座位压力数值,根据算法控制电机驱动系统。
技术总结
本发明公开了一种助行器轮椅的随动助行控制系统,包括主控制器、传感器系统和电机驱动系统,其中:主控制器包括行驶控制系统、助行控制系统、陪护控制系统;传感器系统包括手柄传感器、座椅压力传感器、红外传感器、陀螺仪、超声传感器;电机驱动系统包括输出驱动电路、过流保护电路、差分电流采样电路;控制系统通过采样的手柄压力和推力数值,通过算法控制电机驱动系统。
技术研发人员:王强,兰陟
受保护的技术使用者:国家康复辅具研究中心
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!