用于喉部微创手术夹取操作的柔性机器人及系统
本发明涉及医疗机器人,尤其涉及一种用于喉部微创手术夹取操作的柔性机器人及系统。
背景技术:
1、喉部是人体的重要器官,在对喉部进行手术时,尽量减少手术过程对喉部组织的破坏、最大程度地保护器官已经成为共识。喉部微创手术由于其创伤小的特点,已经逐步成为主流。传统的喉部微创手术主要采用支撑喉镜建立手术通道,医生手持刚性器械从手术通道进入人体进行操作。然而,刚性器械自由度较少,难以进行灵活操作,且医生手持的手术方法存在精准操作困难等问题。因此,研制柔性喉部微创手术机器人十分有必要。
2、在一般的喉部微创手术过程中,如扁桃体切除,一般需要夹取、切割和内窥三种器械。其中,夹取是将组织进行固定,方便切割装置进行切割。现有相关技术中,一种喉部微创手术柔性机器人虽然具备柔性,但是其夹取器械依然依赖于目前已有的活检钳,不仅仍然依赖于医生手动操作,而且夹取力大小不可控,容易造成组织损伤。而现有能够进行自主夹取操作手术机器人,由于其多臂机构空间较大,无法适用于喉部狭小空间。
3、因此,有必要提供一种新的技术方案以解决上述技术问题。
技术实现思路
1、本发明的目的在于提供一种用于喉部微创手术夹取操作的柔性机器人及系统,通过控制柔性机器人的末端弯曲、旋转和移动,并结合夹取模块,可实现在喉部微创手术过程中的灵活自主夹取操作。
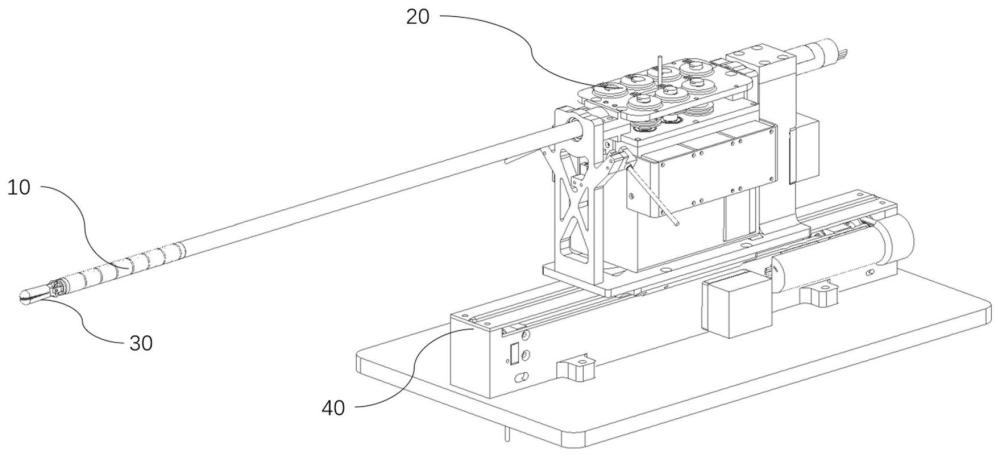
2、本发明提供一种用于喉部微创手术夹取操作的柔性机器人,包括柔性体模块、驱动模块、夹取模块和运动模块,所述夹取模块安装在所述柔性体模块的柔性末端,所述柔性体模块的首端安装在所述驱动模块上,所述驱动模块用于驱动所述柔性体模块向指定方向进行弯曲;所述柔性体模块和所述驱动模块安装在所述运动模块上,所述运动模块用于带动所述驱动模块、所述柔性体模块和所述夹取模块进行旋转和移动;
3、其中,所述夹取模块包括夹钳机构和夹钳牵引线,所述夹钳牵引线的一端与所述夹钳机构连接,所述夹钳牵引线的另一端贯穿所述柔性体模块并与所述驱动模块连接,所述驱动模块通过牵引所述夹钳牵引线移动以驱动所述夹钳机构进行夹取操作。
4、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,所述夹取模块还包括连接环,所述夹钳机构铰接在所述连接环上,所述连接环固设于所述柔性体模块的末端;
5、所述夹钳机构包括第一夹爪、第二夹爪、第一连杆、第二连杆、复位弹性件和驱动拉杆,所述第一夹爪和所述第二夹爪通过第一铰链互相铰接,所述第一铰链同时铰接在所述连接环上;所述复位弹性件的两端分别与所述第一夹爪和所述第二夹爪的相对侧固定连接,所述第一连杆和所述第二连杆的一端分别与所述第二夹爪和所述第一夹爪的一端铰接,所述第一连杆和所述第二连杆的另一端共同与所述驱动拉杆的一端铰接,所述驱动拉杆的另一端连接所述夹钳牵引线;
6、其中,当所述驱动模块牵拉所述夹钳牵引线时,所述夹钳牵引线带动所述驱动拉杆移动,所述第一连杆和所述第二连杆通过所述驱动拉杆的移动带动所述第一夹爪和所述第二夹爪闭合;当所述驱动模块松开所述夹钳牵引线时,所述复位弹性件带动所述第一夹爪和所述第二夹爪张开。
7、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,所述柔性体模块包括一个导管、若干弯曲控制环、若干柔性体牵引线、若干外部弹性体、一个内部弹性体、一个末端套筒和一个外部套筒;
8、所述内部弹性体为中空管状结构,若干所述弯曲控制环间隔的套设在所述内部弹性体的外表面,第一个所述弯曲控制环与所述导管的一端固定连接,最后一个所述弯曲控制环与所述末端套筒的一端固定连接,所述导管的另一端与所述驱动模块连接,所述末端套筒的另一端与所述夹取模块连接;若干所述柔性体牵引线的一端与若干所述弯曲控制环连接,若干所述柔性体牵引线的另一端与所述驱动模块连接;若干所述外部弹性体分别位于相邻两个所述弯曲控制环之间;所述外部套筒为薄壁弹性体,套设在若干所述弯曲控制环的外部;其中,所述驱动模块通过牵引所述柔性体牵引线移动以驱动所述柔性体模块向指定方向进行弯曲。
9、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,所述驱动模块包括若干第一牵引模组、一牵引固定部件、一理线部件和若干第一传感器,所述第一牵引模组和所述理线部件固设于所述牵引固定部件上;
10、每个所述第一牵引模组包括一个第一驱动电机和一个第一线轮,所述第一线轮的一端与所述第一驱动电机的输出端固定连接,所述第一线轮的另一端连接一所述第一传感器,所述第一传感器用于对所述第一线轮的旋转角度进行检测;
11、若干所述柔性体牵引线通过所述理线部件整理后按预设顺序依次固定连接在若干所述第一线轮上,所述第一驱动电机通过驱动所述第一线轮旋转以对相应的所述柔性体牵引线进行牵引。
12、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,所述柔性机器人还包括力传感器,所述力传感器安装在所述牵引固定部件上并与所述夹钳牵引线连接;所述驱动模块还包括第二牵引模组和第二传感器,所述第二牵引模组固设于所述牵引固定部件上,所述第二牵引模组包括第二驱动电机和第二线轮,所述第二线轮的一端与所述第二驱动电机的输出端固定连接,所述第二线轮的另一端连接所述第二传感器,所述第二传感器用于对所述第二线轮的旋转角度进行检测;
13、所述夹钳牵引线依次穿过所述末端套筒、所述内部弹性体、所述导管、所述理线部件和所述力传感器固定连接在所述第二线轮上,所述第二驱动电机通过驱动所述第二线轮旋转以对所述夹钳牵引线进行牵引。
14、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,所述柔性体模块至少包括两个弯曲单元,每个所述弯曲单元包括至少两个所述弯曲控制环和至少一个所述外部弹性体,并且每个所述弯曲单元的弯曲由至少两根所述柔性体牵引线控制,至少两根所述柔性体牵引线沿所述内部弹性体的周向间隔分布。
15、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,靠近所述导管的所述弯曲单元的所述外部弹性体的刚度大于靠近所述夹钳机构的所述弯曲单元的所述外部弹性体的刚度。
16、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,若干所述第一牵引模组划分为p组,每组所述第一牵引模组对应控制一个所述弯曲单元的弯曲,每组所述第一牵引模组中包括n个所述第一牵引模组,并且n个所述第一牵引模组沿所述导管的轴向并排设置;
17、其中,n个所述第一牵引模组的n个所述第一线轮对应连接n条所述柔性体牵引线,n个所述第一线轮在所述第一线轮的轴向上的位置不同,使得每组所述第一牵引模组中的n个所述第一线轮对应连接的n条所述柔性体牵引线各自位于不同的平面上;其中,p和n均为正整数,且p为所述柔性体模块上的所述弯曲单元的个数,n为控制一个所述弯曲单元对应的所述柔性体牵引线的条数。
18、根据本发明提供的用于喉部微创手术夹取操作的柔性机器人,所述运动模块包括底座、直线运动子模块、支架和旋转运动子模块,所述直线运动子模块包括第一驱动装置和直线运动机构,所述第一驱动装置安装在所述底座上,所述底座上设有滑轨,所述直线运动机构滑动的设置在所述滑轨上;所述支架安装在所述直线运动机构的运动端,所述旋转运动子模块包括第二驱动装置,所述第二驱动装置安装在所述支架上;
19、其中,所述柔性体模块、所述驱动模块以及所述夹取模块构成的整体铰接在所述支架上,并与所述第二驱动装置的输出轴固定连接,以在所述第二驱动装置的驱动下进行旋转运动。
20、本发明还提供一种用于喉部微创手术夹取操作的系统,包括总控单元、若干驱动器和如上任一项所述的用于喉部微创手术夹取操作的柔性机器人,其中,若干所述驱动器均与所述总控单元信号连接,并且若干所述驱动器分别与所述驱动模块和所述运动模块信号连接,所述总控单元通过控制若干所述驱动器以对所述驱动模块和所述运动模块进行控制。
21、本发明的上述技术方案具有以下有益效果:
22、本发明提供的用于喉部微创手术夹取操作的柔性机器人及系统,通过在柔性体模块的柔性末端设置夹取模块,并将柔性体模块的首端安装在驱动模块上,驱动模块用于驱动柔性体模块向指定方向进行弯曲;夹取模块包括夹钳机构和夹钳牵引线,夹钳机构通过夹钳牵引线连接至驱动模块,驱动模块还通过牵引夹钳牵引线移动以驱动夹钳机构进行夹取操作,因此本发明的柔性机器人能实现喉部手术过程中对人体喉部进行自动夹取操作,无需额外使用活检钳,可极大减轻医生在手术过程中的工作量和疲劳程度,提高手术精度。并且,本发明的夹取模块的夹钳牵引线是穿过柔性体模块的内部与驱动模块连接,无需额外增设机械臂机构,因此本发明的柔性机器人的空间占比小,适用于喉部狭小空间。
- 还没有人留言评论。精彩留言会获得点赞!