一种冠脉介入手术成像处理方法和系统与流程
本技术涉及冠脉介入手术成像处理,特别是涉及一种冠脉介入手术成像处理方法和系统。
背景技术:
1、心脑血管微创介入疗法是针对心脑血管疾病的主要治疗手段。和传统外科手术相比,有着切口小、术后恢复时间短等明显优势。心脑血管介入手术是由医生手动将导管、导丝以及支架等器械送入病患体内来完成治疗的过程。
2、而要使用介入手法就必须要用到dsa(数字血管减影造影机),通过向冠脉血管内注入造影剂,可以从dsa的图像上看到血管形态。因为心脏在持续不断的跳动,外加人体也在不停的呼吸,因此在dsa图像下的冠脉血管是在不断晃动的图像。医生在对冠脉血管治疗时,要在不断晃动的图像下进行操作,操作难度大。
3、对于冠脉介入手术成像存在如下几个方面的问题:(1)在手术过程中,因为心脏不停跳动,dsa呈现的血管图像也是不停的晃动,医生操作中需要眼睛不断调整跟随图像晃动,难以精准定位;(2)患者不停的呼吸动作也会对血管图像位置产生影响,最终的图像是呼吸和心跳的符合叠加效果,呼吸和心跳在术中不会一直不变,患者的呼吸和心跳频率会出现随机变化,无法用统一的方法简单处理;(3)在做复杂手术中,医生需要准确判断位置,不停晃动的冠脉血管图像会影响医生的手术操作。
技术实现思路
1、本技术提供一种冠脉介入手术成像处理方法和系统,旨在解决现有技术dsa呈现的血管图像不停的晃动,难以精准定位的问题。
2、第一方面,一种冠脉介入手术成像处理方法,所述方法包括:
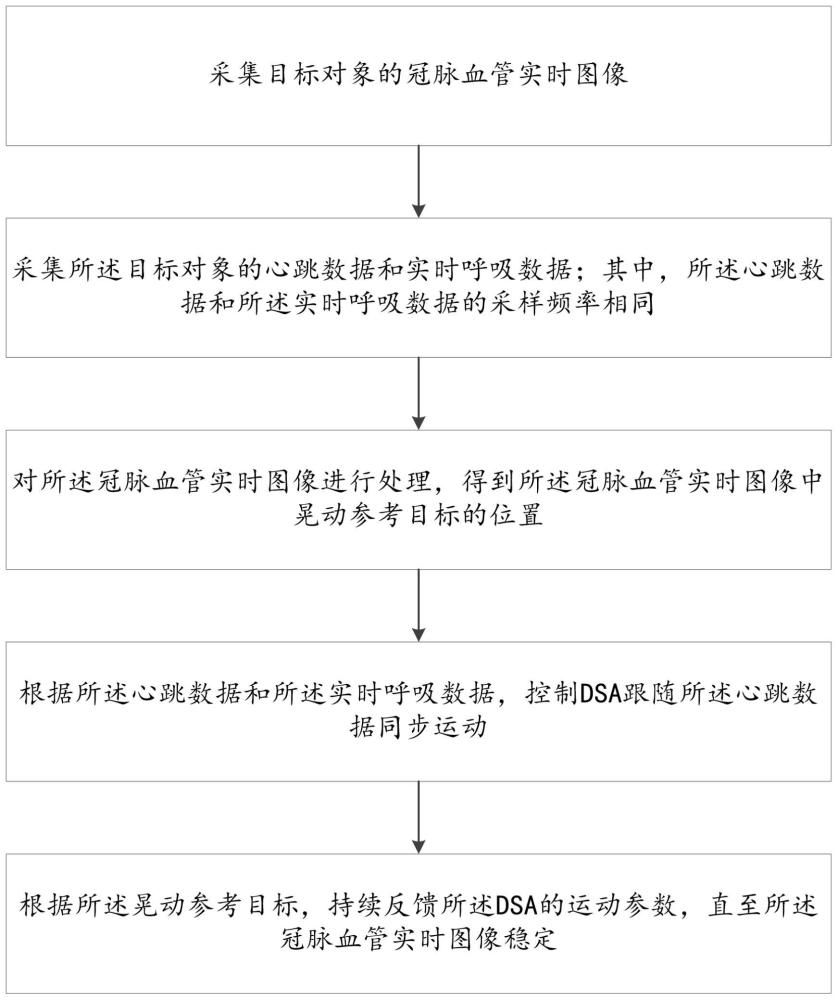
3、采集目标对象的冠脉血管实时图像;
4、采集所述目标对象的心跳数据和实时呼吸数据;其中,所述心跳数据和所述实时呼吸数据的采样频率相同;
5、对所述冠脉血管实时图像进行处理,得到所述冠脉血管实时图像中晃动参考目标的位置;
6、根据所述心跳数据和所述实时呼吸数据,控制dsa跟随所述心跳数据同步运动;
7、根据所述晃动参考目标,持续反馈所述dsa的运动参数,直至所述冠脉血管实时图像稳定。
8、上述方案中,可选的,所述根据所述晃动参考目标,持续反馈所述dsa的运动参数,直至所述冠脉血管实时图像稳定,包括:
9、判断所述冠脉血管实时图像中所述晃动参考目标的位置是否发生移动;
10、在所述冠脉血管实时图像中所述晃动参考目标的位置发生移动的情况下,反馈所述dsa的运动参数,并根据所述dsa的运动参数,控制所述dsa跟随所述心跳数据同步运动;
11、在所述冠脉血管实时图像中所述晃动参考目标的位置未发生移动的情况下,确定所述冠脉血管实时图像稳定。
12、上述方案中,可选的,所述采集所述目标对象的心跳数据和实时呼吸数据,包括:
13、通过设置在所述目标对象的目标部位上的多个电极片采集所述目标对象的心跳数据和实时呼吸数据;
14、通过监护仪获取所述多个电极片采集的所述心跳数据和所述实时呼吸数据。
15、上述方案中,可选的,所述dsa的运动参数包括呼吸运动系数r、呼吸运动幅值h、心跳运动系数p和心跳运动幅值q。
16、上述方案中,可选的,所述根据所述心跳数据和所述实时呼吸数据,控制dsa跟随所述心跳数据同步运动,包括:
17、在任一预设周期时长内,确定多个实时呼吸数据中的呼吸数据最大值x和呼吸数据最小值y;其中,所述预设周期时长包括多个采集时刻,每个所述采集时刻对应一个实时呼吸数据;
18、根据所述呼吸数据最大值x和所述呼吸数据最小值y,确定每个所述采集时刻的呼吸数据修正值m;
19、在所述预设周期时长内,确定所述预设周期时长的心跳数据中的时刻e和周期时长f,以及最大值时刻g;
20、根据所述时刻e和周期时长f,以及最大值时刻g,确定每个所述采集时刻的心跳数据修正值n;
21、根据所述呼吸数据修正值m和所述心跳数据修正值n,确定复合运动曲线t;
22、根据所述复合运动曲线,确定所述dsa的多个电机的运动数据;
23、根据所述多个电机的运动数据,控制所述多个电机运动,以控制所述dsa跟随所述心跳数据同步运动。
24、上述方案中,可选的,在所述冠脉血管实时图像中所述晃动参考目标的位置发生移动的情况下,反馈所述dsa的运动参数,并根据所述dsa的运动参数,控制所述dsa跟随所述心跳数据同步运动,包括:
25、根据历史数据,设定所述呼吸运动系数r、所述呼吸运动幅值h、所述心跳运动系数p和所述心跳运动幅值q;
26、根据所述晃动参考目标在所述冠脉血管实时图像上的运动轨迹,确定所述晃动参考目标在各个时刻的坐标;
27、根据所述晃动参考目标在各个时刻的坐标,确定所述晃动参考目标的第一变化幅值k;
28、在所述冠脉血管实时图像中所述晃动参考目标的位置发生移动的情况下,增大所述呼吸运动系数r、所述呼吸运动幅值h、所述心跳运动系数p和所述心跳运动幅值q;
29、根据增大后的呼吸运动系数r、增大后的呼吸运动幅值h、增大后的心跳运动系数p和增大后的心跳运动幅值q,计算所述dsa的多个电机控制所述dsa运动后所述晃动参考目标的第二变化幅值l;
30、在所述第二变化幅值l大于或等于所述第一变化幅值k的情况下,减小所述增大后的呼吸运动系数r、增大后的呼吸运动幅值h、增大后的心跳运动系数p和增大后的心跳运动幅值q,并重复执行上述根据增大后的呼吸运动系数r、增大后的呼吸运动幅值h、增大后的心跳运动系数p和增大后的心跳运动幅值q,计算所述dsa的多个电机控制所述dsa运动后所述晃动参考目标的第二变化幅值l的步骤;
31、在所述第二变化幅值l小于所述第一变化幅值k的情况下,对所述增大后的呼吸运动系数r、增大后的呼吸运动幅值h、增大后的心跳运动系数p和增大后的心跳运动幅值q进行再次增大,直至所述第二变化幅值l不再减小。
32、上述方案中,可选的,在所述根据所述晃动参考目标,持续反馈所述dsa的运动参数,直至所述冠脉血管实时图像稳定之后,所述方法还包括:
33、判断所述目标对象的体位是否发生变化;
34、在所述目标对象的体位发生变化的情况下,重复执行上述对所述冠脉血管实时图像进行处理,得到所述冠脉血管实时图像中晃动参考目标的位置的步骤;
35、在所述目标对象的体位未发生变化的情况下,完成所述冠脉血管实时图像的处理。
36、第二方面,一种冠脉介入手术成像处理系统,所述系统包括:
37、所述系统包括:成像设备和监护设备,以及dsa控制装置;
38、所述成像设备包括dsa和导管床;
39、所述监护设备包括监护仪和多个电极片,所述多个电极片均与所述监护仪连接,所述监护仪与所述dsa连接;
40、其中,所述dsa,用于采集目标对象的冠脉血管实时图像;
41、所述监护仪,用于通过所述多个电极片采集所述目标对象的心跳数据和实时呼吸数据;其中,所述心跳数据和所述实时呼吸数据的采样频率相同;
42、所述dsa控制装置,用于对所述冠脉血管实时图像进行处理,得到所述冠脉血管实时图像中晃动参考目标的位置;
43、所述dsa控制装置,用于根据所述心跳数据和所述实时呼吸数据,控制dsa跟随所述心跳数据同步运动;
44、所述dsa控制装置,用于根据所述晃动参考目标,持续反馈所述dsa的运动参数,直至所述冠脉血管实时图像稳定。
45、上述方案中,可选的所述dsa控制装置,具体用于:
46、判断所述冠脉血管实时图像中所述晃动参考目标的位置是否发生移动;
47、在所述冠脉血管实时图像中所述晃动参考目标的位置发生移动的情况下,反馈所述dsa的运动参数,并根据所述dsa的运动参数,控制所述dsa跟随所述心跳数据同步运动;
48、在所述冠脉血管实时图像中所述晃动参考目标的位置未发生移动的情况下,确定所述冠脉血管实时图像稳定。
49、本技术基于对现有技术问题的进一步分析和研究,认识到现有技术dsa呈现的血管图像不停的晃动,难以精准定位的问题。本方案通过dsa实时采集患者的冠脉血管实时图像,通过所述冠脉血管实时图像内定位导引导管头端位置;接收所述患者的实时心跳数据和实时呼吸数据;通过分析所述患者的实时心跳数据和实时呼吸数据,计算所述dsa跟随心动周期的运动指令,控制所述dsa运动以实现所述dsa和患者心脏同步运动;观察导引导管头端在所述患者的冠脉血管实时图像中是否移动;若是,视为配准未完成,系统将继续调整参数,重新计算后改变运动动作;若否,则配准完成。
50、通过本方法,在冠脉介入手术中,根据患者的实时心跳和呼吸,系统自动计算并控制dsa进行患者心脏部位的同步运动,使得dsa和患者的心脏保持相同频率和幅度动作,使得两者处于相对静止,结果可以在图像上呈现基本稳定的血管图像。可以方便医生分析与治疗血管疾病,提高手术效率。
- 还没有人留言评论。精彩留言会获得点赞!