操控装置、手术机器人及手术机器人开合角度的校正方法
本发明涉及医疗设备领域,尤其涉及一种操控装置、手术机器人及手术机器人开合角度的校正方法。
背景技术:
1、手术机器人在进行微创伤手术的过程中,医生需要手持操控端(例如医生控制平台)的操控手柄完成手术动作,患者手术平台的器械端能够获取医生的手术动作进而对患者做出对应的术式动作,以实现手术的远程遥控。现有技术中,医生控制平台中的操控手柄能够通过传感器检测其开合角度,并依据开合角度遥控患者手术平台的器械端做出相应的开合动作。操控手柄的开合动作类似手指的张开和捏合的动作。现有的操控手柄上通常设置霍尔传感器,霍尔传感器可通过采集操控手柄中相对的捏合部位的开合距离改变引起的霍尔值变化,从而获取操控手柄的开合角度。由于霍尔传感器输出的信号为模拟量信号,信号种类单一,容错性差,该信号容易在传输时受到外界干扰而影响操控端和器械端之间动作的一致性,进而影响手术机器人运行时的安全性和可靠性。此外,手术机器人的操控手柄制备材料的批次不同和安装差异均会影响霍尔传感器的输出值,同时霍尔传感器长期运行时还会产生累积误差,故每台手术机器人在出厂前均需要具有复杂的标定过程,降低了手术机器人的生产效率,并提高了手术机器人的生产成本。
技术实现思路
1、本发明的目的在于提供一种操控装置、手术机器人及手术机器人开合角度的校正方法,该手术机器人采用数字传感器进行主端开合机构的开合角度测量,如此可增强信号传输时的抗干扰能力,降低装置功耗;该手术机器人无需出厂前的校正和标定,可降低制造工艺的复杂度,并提升手术机器人工作时的准确度和可靠性。
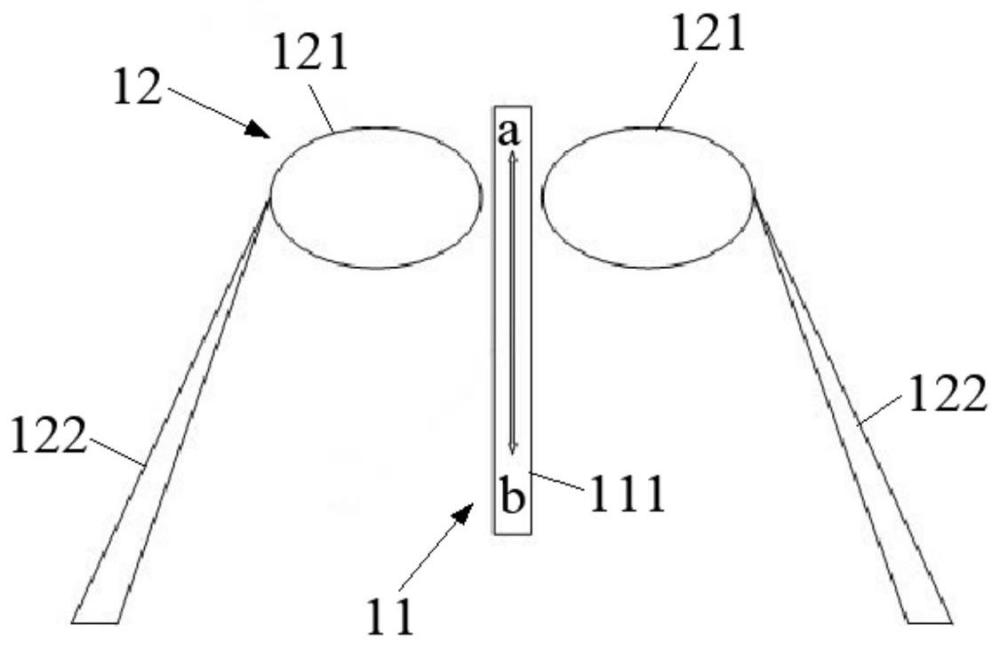
2、为实现上述目的,本发明提供一种操控装置,包括:传动机构、主端开合机构和数字传感器,所述主端开合机构用于在承受捏合力时改变开合角度,所述传动机构连接所述主端开合机构,并用于驱动所述主端开合机构产生抵抗捏合力的反作用力;所述数字传感器固定在所述主端开合机构和/或所述传动机构上,并用于检测所述主端开合机构的开合角度;所述主端开合机构包括两个齿轮,两个所述齿轮在自身径向上并排设置,所述传动机构用于驱动至少一个所述齿轮转动;所述数字传感器用于检测所述齿轮的转动角度。
3、可选的,所述主端开合机构还包括捏合手柄,所述捏合手柄的数量与所述齿轮的数量相同,每个所述捏合手柄与对应的一个所述齿轮连接;至少一个所述齿轮能够带动对应的一个所述捏合手柄转动,以使两个所述捏合手柄相互靠近或相互分离。
4、可选的,所述传动机构分别与两个所述齿轮连接,所述传动机构用于同步驱动两个所述齿轮朝相反的方向转动,两个所述齿轮转动后分别驱动对应的一个所述捏合手柄朝相互捏合或相互远离的方向转动。
5、可选的,所述传动机构与其中一个所述齿轮连接,所述传动机构用于驱动其中一个所述齿轮朝靠近或远离另一个所述齿轮的方向转动,所述齿轮转动后驱动对应的一个所述捏合手柄朝靠近或远离另一个所述捏合手柄的方向转动。
6、可选的,所述数字传感器包括相对位置编码器、绝对位置编码器和磁栅传感器中的至少一种。
7、可选的,所述操控装置还包括在所述捏合手柄的外表面上以矩阵方式分布的多个感应传感器,所述感应传感器设置在所述捏合手柄上,并用于检测所述主端开合机构与手指的接触情况。
8、为实现上述目的,本发明还提供一种手术机器人,包括主端设备和从端设备,所述主端设备包括任一项所述的操控装置,所述主端设备用于控制所述从端设备进行手术操作;所述从端设备包括从端开合机构,所述传动机构用于根据所述从端开合机构受到的阻力带动所述主端开合机构产生所述反作用力。
9、可选的,所述操控装置包括接触感应模块、冗余检测模块、角度校正模块、姿态监控模块和操控辅助模块;
10、所述接触感应模块用于根据所述主端开合机构与手指的接触情况判断所述操控装置的使用状态;
11、所述冗余检测模块用于通过所有所述数字传感器获取所述主端开合机构的开合状态;
12、所述角度校正模块用于校正所述主端开合机构和所述从端开合机构的角度偏差,以使所述主端开合机构的转动角度和所述从端开合机构的转动角度的比值始终满足初始映射比值;
13、所述操控装置设置在用于捏合的操作关节上,所述姿态监控模块用于判断所述操作关节是否处于正常操控状态;
14、所述操控辅助模块用于变更所述操控装置的控制模式。
15、为实现上述目的,本发明还提供一种手术机器人开合角度的校正方法,所述手术机器人开合角度的校正方法包括:
16、通过数字传感器获取主端开合机构的第一转动角度和从端开合机构的第二转动角度;设定所述从端开合机构跟随所述主端开合机构转动时的预定映射比值;
17、使所述从端开合机构依据所述预定映射比值与所述主端开合机构同步朝预定方向转动,直至所述主端开合机构和所述从端开合机构均到达预定位置;
18、使所述主端开合机构和所述从端开合机构依照初始映射比值同步转动。
19、可选的,使所述从端开合机构依据所述预定映射比值与所述主端开合机构同步朝预定方向转动的方法包括:
20、将所述预定映射比值设置为初始映射比值;根据所述第一转动角度和所述第二转动角度选择所述主端开合机构和所述从端开合机构转动时的预定方向,以使所述从端开合机构优先到达所述预定位置;使所述从端开合机构跟随所述主端开合机构同步运行,直至所述从端开合机构和所述主端开合机构相继到达所述预定位置;
21、或者,将所述预定映射比值设置为所述第一转动角度与所述第二转动角度的比值;使所述从端开合机构跟随所述主端开合机构同步运行,直至所述主端开合机构和所述从端开合机构同步到达所述预定位置。
22、本发明公开的操控装置包括传动机构、主端开合机构和数字传感器,主端开合机构用于在承受捏合力时改变开合角度,传动机构连接主端开合机构,并用于驱动主端开合机构产生抵抗捏合力的反作用力;数字传感器固定在主端开合机构和传动机构中的至少一个上,并用于检测主端开合机构的开合角度;主端开合机构包括两个齿轮,两个齿轮在自身径向上并排设置,传动机构用于驱动至少一个齿轮转动;数字传感器用于检测齿轮的转动角度。
23、本发明提供的操控装置、手术机器人及手术机器人开合角度的校正方法至少具有以下有益效果:
24、第一、本发明采用数字传感器进行主端开合机构的开合角度测量,使主端开合机构的检测信号为数字信号,如此可增强信号传输时的抗干扰能力,增加无线电供电系统和无线通信系统应用的可靠性,还可降低装置功耗。同时,由于数字传感器运行时不会产生积累误差,使手术机器人无需出厂前复杂地校正和标定环节,如此可降低手术机器人制造工艺的复杂度,提高手术机器人的生产效率,提升手术机器人主端设备和从端设备运行时的一致性,提升机器人工作时的精准度和可靠性。
25、第二、本发明提供的操控装置具有力反馈功能,能够在主端开合机构向医生的手部反馈从端开合机构手术时受到的反作用力,可真实模拟医生在捏合主端开合机构进行手术操作时的阻力,如此可使医生手术时具有较为舒适的手感,并增强医生在进行手术操作时的真实感和临场感。
26、第三、将数字传感器设置为相对位置编码器时,由于相对位置编码器能够使主端开合机构的开合角度实现增量式反馈数据,故可在手术机器人的操控端和器械端在任何状态下具可直接进入主从控制模式并进行增量角度匹配,而无需使主端开合机构和从端开合机构再次进入主从控制模式前做绝对开合角匹配。操控端可以直接利用相对位置编码器的转动角度增量值作为从端开合机构的开合指令,无缝隙地控制器械端从现有开合角度根据操控端的开合变化而运动,且器械端在开合角度的运动范围内无运动死区,这样做可简化主端开合机构或从端开合机构开合角度校正的步骤,降低操作者的操作难度,并提升操作者的操作体验。
- 还没有人留言评论。精彩留言会获得点赞!