潮气量控制方法及麻醉呼吸机与流程
本发明涉及呼吸机,尤其涉及一种潮气量控制方法及麻醉呼吸机。
背景技术:
1、根据麻醉呼吸机的结构差异,主要可分为两种类型:风箱式与活塞式。其中风箱式多使用压缩气体作为驱动风箱运动的动力源。近年来,以电控涡轮为动力源驱动风箱运动的技术逐步成熟,在以婴幼儿和小动物为主要适用对象的风箱式麻醉呼吸机市场取得一定市场份额。活塞式麻醉呼吸机使用电机驱动活塞运动,对呼吸循环回路内的气体施加压力,进而驱动气体进入动物的肺内完成吸气过程。
2、动物呼吸所需的潮气量与其自身的体重成比例。使用麻醉呼吸机通气时,过高的潮气量将导致肺部过度通气、肺泡过度扩张,造成肺泡和胸膜破裂。过低的潮气量将导致氧合不足或酸中毒。宠物保健市场的快速发展提升了麻醉医生对小动物开展气体麻醉时需要精准实现低潮气量的需求。
3、以压缩气体为动力源的风箱式麻醉呼吸机一般以电控比例阀控制压缩气体进入风箱外腔的速率。比例阀开度越大,风箱受压变形越快。电控比例阀的开关存在一定延时,且阀门开启瞬间气压差比较大,气体流速快,实现较高精度的低潮气量通气对其阀门开度的控制、延迟时间的要求极高。使用压缩气体驱动的风箱式麻醉呼吸机难以实现低潮气量通气的同时维持较高的潮气量精度,目前行业内没有宣称20ml以下低潮气量通气的压缩气体驱动风箱式麻醉呼吸机。
技术实现思路
1、本发明的主要目的是提供一种潮气量控制方法及麻醉呼吸机,旨在解决低潮气量通气精度低的问题。
2、为实现上述目的,本发明提出的潮气量控制方法,所述方法包括
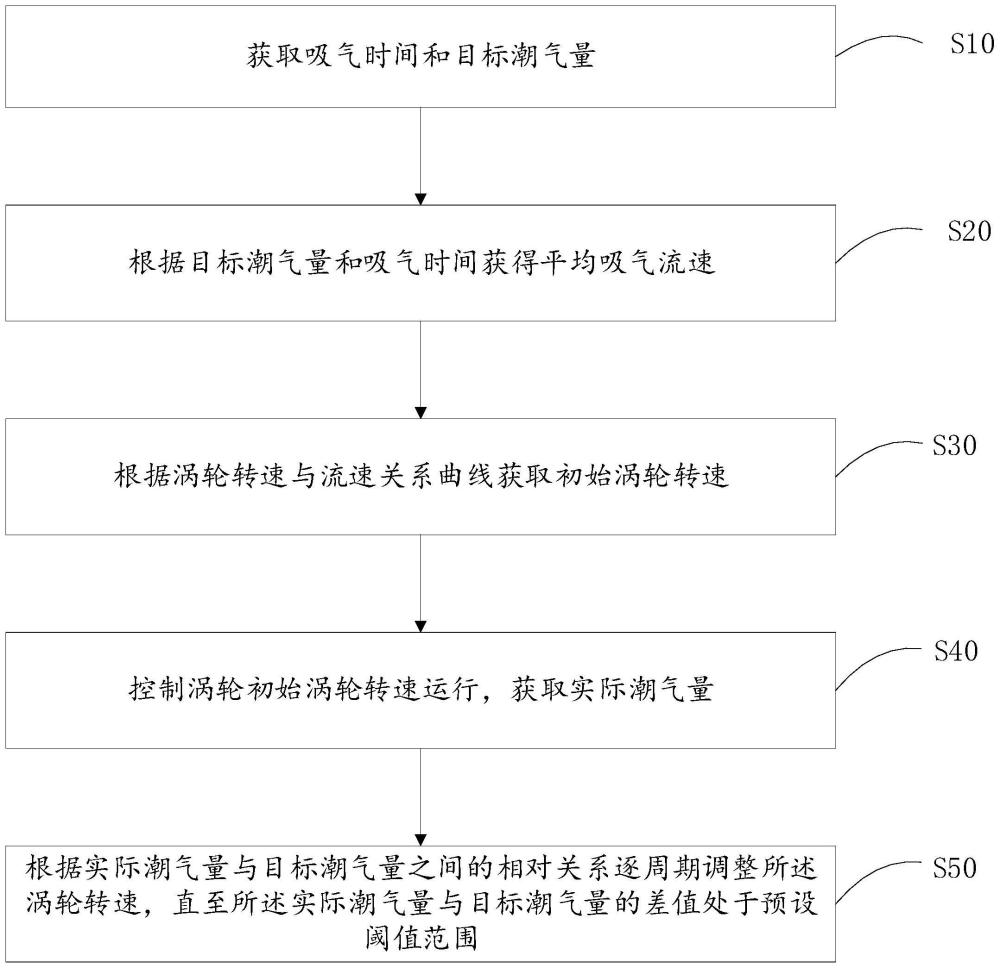
3、获取吸气时间和目标潮气量;
4、根据目标潮气量和吸气时间获得平均吸气流速;
5、根据涡轮转速与流速关系曲线获取初始涡轮转速;
6、控制涡轮初始涡轮转速运行,获取实际潮气量;
7、根据实际潮气量与目标潮气量之间的相对关系逐周期调整所述涡轮转速,直至所述实际潮气量与目标潮气量的差值处于预设阈值范围。
8、可选地,所述根据实际潮气量与目标潮气量之间的相对关系逐周期调整所述涡轮转速,直至所述实际潮气量与目标潮气量的差值处于预设阈值范围的步骤包括:
9、计算预设周期内所述实际潮气量与所述目标潮气量之间的差值;
10、根据所述差值调节涡轮转速,并累计调节次数;
11、当所述调节次数大于预设值时,根据历史周期内涡轮转速与潮气量对涡轮转速与流速关系曲线进行校正获得拟合曲线;
12、根据所述拟合曲线获得所述目标潮气量对应的涡轮转速,并控制涡轮按所述涡轮转速运行。
13、可选地,采用稳健回归、泰尔森回归、随机采样一致性算法中至少一种对涡轮转速与流速关系曲线进行校正。
14、可选地,所述获取吸气时间和目标潮气量的步骤之前还包括:
15、校准麻醉呼吸机;
16、逐步调整涡轮转速增加或减少,同时获取涡轮在对应转速下的驱动气流流速;
17、存储涡轮转速与驱动气源流速之间的对应关系相关数据,并建立涡轮转速与其产生的驱动气源流速之间的对应关系。
18、可选地,所述麻醉呼吸机的吸气接口连通气体流量分析仪的进气口,所述所述麻醉呼吸机的呼气接口连通气体流量分析仪的出气口,建立气体流量分析仪与所述麻醉呼吸机的通讯通路以校准所述麻醉呼吸机。
19、可选地,对涡轮转速进行呼吸管路顺应性补偿、气体压缩补偿和泄露补偿中的至少一种。
20、可选地,所述潮气量控制方法还包括:
21、监测所述呼吸管路的压力;
22、结合所述呼吸管路的压力和管路泄漏检测过程评估的呼吸管路顺应性,对实际进入动物肺内的潮气量进行补偿;
23、可选地,根据通气周期压力的变化对气体体积的压缩进行补偿。
24、可选地,所述潮气量控制方法还包括:
25、根据通气周期内流量积分数值计算系统泄漏值;
26、根据吸气阶段与呼气阶段压力的幂函数值分别进行积分,确定吸气阶段与呼气阶段泄漏量的比例系数;
27、根据系统泄漏值和吸气阶段泄漏量的比例系数对呼吸面罩的泄漏进行补偿。
28、另外,本发明还提供了一种麻醉呼吸机,所述麻醉呼吸机用于执行如上述所述的潮气量控制方法;
29、所述麻醉呼吸机包括呼吸回路结构,所述呼吸回路结构包括:
30、供气模块,包括气源装置和供氧通路,所述气源装置与所述供氧通路连通以向所述供氧通路输入功能性气体;
31、第一驱动模块,包括涡轮驱动通路、供气通路和风箱;所述风箱具有驱动腔和储气腔,所述涡轮驱动通路与所述驱动腔连通,所述供气通路的一端与所述储气腔连通;所述涡轮驱动通路上串设有涡轮;
32、呼吸模块,包括吸气支路、呼气支路和输气支路,所述吸气支路的进气端和所述呼气支路的出气端均与所述输气支路连通,所述吸气支路的出气端和所述呼气支路的进气端通过y形呼吸管路与动物呼吸口连通;所述输气支路的一端与所述供氧通路连通,所述输气支路的另一端与所述供气通路连通;
33、所述涡轮驱动通路、所述吸气支路和所述呼气支路上均对应串设有流量传感器。
34、本发明技术方案中,涡轮驱动的风箱式麻醉呼吸机的控制器通过调节呼吸周期内吸气阶段的涡轮转速和呼气阶段的涡轮转速,结合流量传感器监测吸、呼气的流速曲线对潮气量进行计算、监测,并根据监测的潮气量与设定潮气量之间的相对关系对涡轮转速进行负反馈调节,经过若干个呼吸周期后实现设定的潮气量。由此在若干个呼吸周期后进行高精度的潮气量通气控制。
技术特征:
1.一种潮气量控制方法,其特征在于,所述方法包括
2.如权利要求1所述的潮气量控制方法,其特征在于,所述根据实际潮气量与目标潮气量之间的相对关系逐周期调整所述涡轮转速,直至所述实际潮气量与目标潮气量的差值处于预设阈值范围的步骤包括:
3.如权利要求2所述的潮气量控制方法,其特征在于,采用稳健回归、泰尔森回归、随机采样一致性算法中至少一种对涡轮转速与流速关系曲线进行校正。
4.如权利要求1所述的潮气量控制方法,其特征在于,所述获取吸气时间和目标潮气量的步骤之前还包括:
5.如权利要求4所述的潮气量控制方法,其特征在于,所述麻醉呼吸机的吸气接口连通气体流量分析仪的进气口,所述所述麻醉呼吸机的呼气接口连通气体流量分析仪的出气口,建立气体流量分析仪与所述麻醉呼吸机的通讯通路以校准所述麻醉呼吸机。
6.如权利要求1至5中任一项所述的潮气量控制方法,其特征在于,对涡轮转速进行呼吸管路顺应性补偿、气体压缩补偿和泄露补偿中的至少一种。
7.如权利要求6所述的潮气量控制方法,其特征在于,所述潮气量控制方法还包括:
8.如权利要求6所述的潮气量控制方法,其特征在于,根据通气周期压力的变化对气体体积的压缩进行补偿。
9.如权利要求6所述的潮气量控制方法,其特征在于,所述潮气量控制方法还包括:
10.一种麻醉呼吸机,其特征在于,所述麻醉呼吸机用于执行如权利要求1至9中任一项所述的潮气量控制方法;
技术总结
本发明公开一种潮气量控制方法及麻醉呼吸机,本发明中涡轮驱动的风箱式麻醉呼吸机的控制器通过调节呼吸周期内吸气阶段的涡轮转速和呼气阶段的涡轮转速,结合流量传感器监测吸、呼气的流速曲线对潮气量进行计算、监测,并根据监测的潮气量与设定潮气量之间的相对关系对涡轮转速进行负反馈调节,经过若干个呼吸周期后实现设定的潮气量。由此在若干个呼吸周期后进行高精度的潮气量通气控制。
技术研发人员:李长健
受保护的技术使用者:深圳唯特医疗有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!