模块化床旁心肺智能康复机器人系统的制作方法
本技术涉及心肺康复锻炼器,尤其涉及一种模块化床旁心肺智能康复机器人系统。
背景技术:
1、随着用户需求的不断提高,心肺康复锻炼不仅用于在心肺受到损伤后的康复康复锻炼,对于普通人,也能够通过心肺康复锻炼增加心肺的机能,达到康复锻炼的目的。
2、现有的心肺康复锻炼器存在以下缺点:1、需要肢体做功进行主动康复锻炼,没有辅助被动康复锻炼的作用;2、没有根据患者的心率及呼吸程度适应性的调整康复锻炼强度;3、人体的四肢不能自主单独康复锻炼。
3、为此,亟需提供一种模块化床旁心肺智能康复机器人系统以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种模块化床旁心肺智能康复机器人系统,可以辅助患者的肢体自主运动,根据患者的呼吸程度适应性的调整康复锻炼强度。
2、为实现上述目的,提供以下技术方案:
3、模块化床旁心肺智能康复机器人系统,包括:
4、承载体,用于承载患者;
5、若干个训练模块,设置于所述承载体旁;
6、总控制装置,若干个所述训练模块均与所述总控制装置电连接,用于选择性地控制所述训练模块运动;
7、呼吸监测模块,一端用于贴合人体,另一端与所述总控制装置电连接;
8、心电监测模块,一端用于贴合人体,另一端与所述总控制装置电连接。
9、作为模块化床旁心肺智能康复机器人系统的可选方案,所述训练模块包括工作台、电机模组和应用接口,所述电机模组安装于所述工作台上,所述应用接口的一端与所述电机模组的转轴连接,所述应用接口的另一端用于插接锻练器件。
10、作为模块化床旁心肺智能康复机器人系统的可选方案,所述锻练器件为手柄或足托。
11、作为模块化床旁心肺智能康复机器人系统的可选方案,所述电机模组的转轴上设置有力矩感知模块。
12、作为模块化床旁心肺智能康复机器人系统的可选方案,所述训练模块还包括电柜箱和升降机构,所述升降机构设置于所述电柜箱和所述工作台之间。
13、作为模块化床旁心肺智能康复机器人系统的可选方案,所述训练模块还包括快速夹紧器,所述快速夹紧器安装于所述电柜箱上,用于装夹承载体。
14、作为模块化床旁心肺智能康复机器人系统的可选方案,所述快速夹紧器包括立杆、固定夹爪和活动夹爪、所述立杆的下端与所述电柜箱连接,所述固定夹爪固定设置于所述立杆上,所述活动夹爪套设于所述立杆上。
15、作为模块化床旁心肺智能康复机器人系统的可选方案,所述活动夹爪上转动设置有限位夹,所述限位夹通过扭簧与所述活动夹爪连接,所述限位夹的一端始终具有抵压于所述立杆的趋势。
16、作为模块化床旁心肺智能康复机器人系统的可选方案,所述立杆沿长度方向间隔设置有多个限位卡齿,所述限位夹的一端卡接于两个所述限位卡齿之间。
17、作为模块化床旁心肺智能康复机器人系统的可选方案,所述训练模块还包括可移动基座,所述电柜箱安装于所述可移动基座上,且所述可移动基座的底部设置有万向轮。
18、与现有技术相比,本实用新型的有益效果:
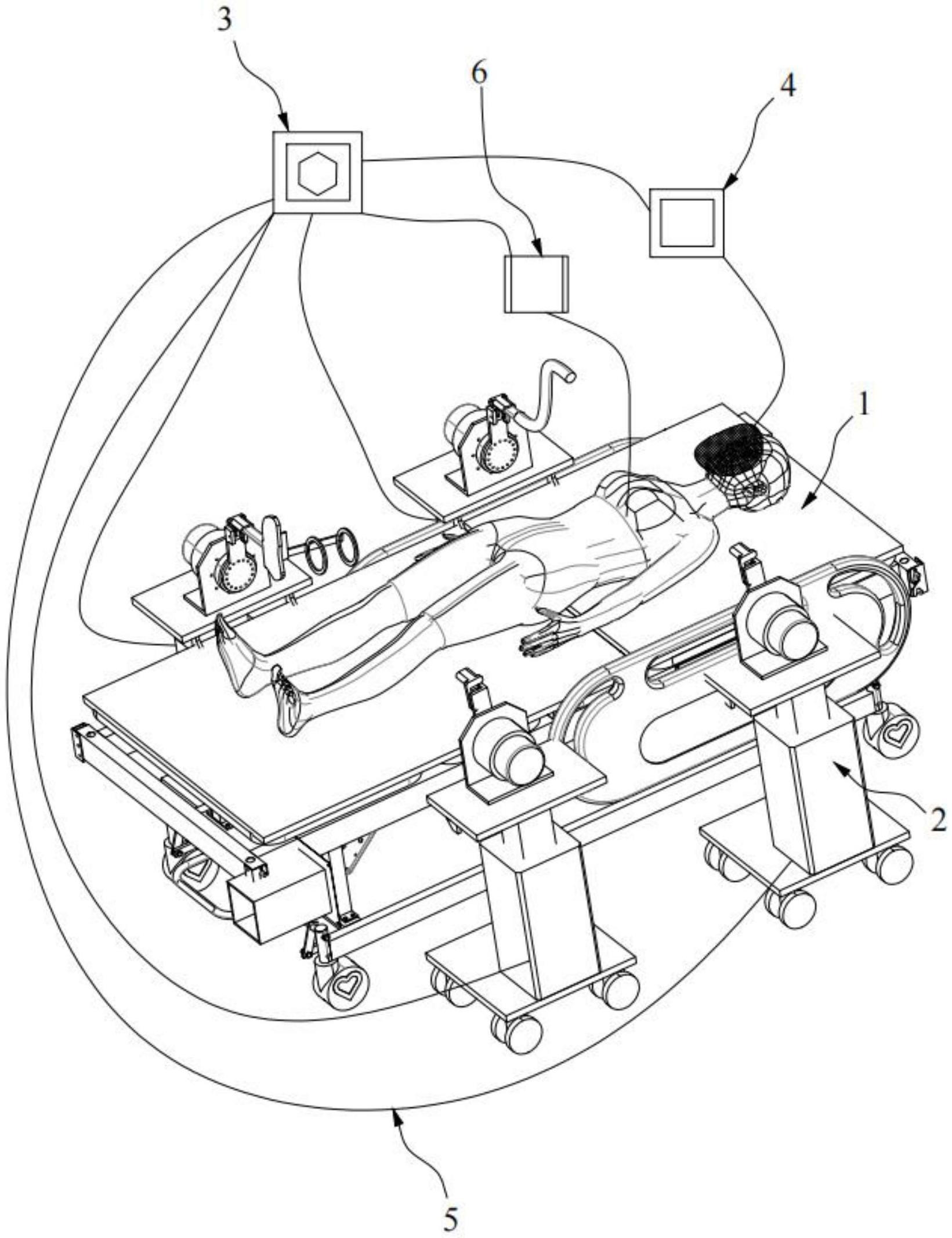
19、本实用新型所提供的模块化床旁心肺智能康复机器人系统,患者平躺在承载体上,在承载体位于人体四肢的位置处根据需要放置相应的训练模块,既可以单独康复锻炼每个肢体,也可以协同康复锻炼单侧手足或双侧手足;每个训练模块均与总控制装置电连接,用于选择性地控制训练模块的运动;心电监测模块和呼吸监测模块均与总控制装置电连接并用于检测人体的心率及呼吸程度,总控制装置根据人体的心率和呼吸程度来调整若干个训练模块的训练剧烈程度。
技术特征:
1.模块化床旁心肺智能康复机器人系统,其特征在于,包括:
2.根据权利要求1所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述训练模块(2)包括工作台(21)、电机模组(22)和应用接口(23),所述电机模组(22)安装于所述工作台(21)上,所述应用接口(23)的一端与所述电机模组(22)的转轴连接,所述应用接口(23)的另一端用于插接锻练器件。
3.根据权利要求2所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述锻练器件为手柄或足托。
4.根据权利要求2所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述电机模组(22)的转轴上设置有力矩感知模块(24)。
5.根据权利要求2所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述训练模块(2)还包括电柜箱(25)和升降机构(26),所述升降机构(26)设置于所述电柜箱(25)和所述工作台(21)之间。
6.根据权利要求5所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述训练模块(2)还包括快速夹紧器(29),所述快速夹紧器(29)安装于所述电柜箱(25)上,用于装夹承载体(1)。
7.根据权利要求6所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述快速夹紧器(29)包括立杆(291)、固定夹爪(292)和活动夹爪(293),所述立杆(291)的下端与所述电柜箱(25)连接,所述固定夹爪(292)固定设置于所述立杆(291)上,所述活动夹爪(293)套设于所述立杆(291)上。
8.根据权利要求7所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述活动夹爪(293)上转动设置有限位夹(294),所述限位夹(294)通过扭簧与所述活动夹爪(293)连接,所述限位夹(294)的一端始终具有抵压于所述立杆(291)的趋势。
9.根据权利要求8所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述立杆(291)沿长度方向间隔设置有多个限位卡齿,所述限位夹(294)的一端卡接于两个所述限位卡齿之间。
10.根据权利要求5-9任一项所述的模块化床旁心肺智能康复机器人系统,其特征在于,所述训练模块(2)还包括可移动基座(27),所述电柜箱(25)安装于所述可移动基座(27)上,且所述可移动基座(27)的底部设置有万向轮(28)。
技术总结
本技术公开了一种模块化床旁心肺智能康复机器人系统,属于心肺康复锻炼器技术领域。本模块化床旁心肺智能康复机器人系统包括:承载体,用于承载患者;若干个训练模块,设置于所述承载体旁;总控制装置,若干个所述训练模块均与所述总控制装置电连接,用于选择性地控制所述训练模块运动;呼吸监测模块,一端用于贴合人体,另一端与总控制装置电连接;心电监测模块,一端用于贴合人体,另一端与总控制装置电连接。本技术既可以单独康复锻炼每个肢体,也可以协同康复锻炼单侧手足或双侧手足,辅助患者的肢体自主运动;还可以根据人体的心率和呼吸程度来调整若干个训练模块的训练剧烈程度。
技术研发人员:查甫兵,周明超,王玉龙,龙建军,王春宝,刘铨权,周熙晔,何婷,李冬霞,刘芳,周静,熊峰
受保护的技术使用者:深圳市第二人民医院
技术研发日:20230105
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!