一种内镜外辅助支撑装置的制作方法
本技术涉及机械领域,尤其涉及到机械部件,具体是指一种内镜外辅助支撑装置。
背景技术:
1、近几年来,单侧双通道脊柱内镜技术(ube/bess)已经引起脊柱外科医生的广泛关注。相对于单通道内镜技术,ube具有学习曲线相对平缓,镜下视野更全面,器械操作更灵活,器械选择更多等诸多优点,已应用于椎间盘突出髓核摘除,椎管或椎间孔狭窄的减压,椎管内囊肿、血肿、脓肿的清除,以及内镜辅助下椎体间融合,未来能使更多更复杂的脊柱退变性疾病实现微创化、内镜化治疗。
2、脊柱后方存在两个潜在间隙,一个是多裂肌三角,另一个是肌肉与椎板之间的间隙(son’s space),这是初始操作空间建立的解剖学基础,我们可以依靠内镜入水的静水压和物理牵拉进一步扩大这个初始工作间隙。这也是ube操作中最重要的步骤。
3、ube操作需要作两个小切口,一个小切口约5mm,用于关节镜插入观察及持续生理盐水冲洗,另一个小切口约8-10mm,用作操作器械入口及生理盐水流出。使用扩张器扩开椎旁肌肉,轻轻地将软组织推开创造空间,随着生理盐水的流入,空间形成并准备使用。ube采用两个相互独立的经皮通道,对切口及椎旁肌无扩张挤压;浮动的内镜和减压器械呈三角关系,且相互分离,互不干扰,可随意倾斜和移动,操作方便灵活;持续的水流灌洗有助于形成工作空间,减少出血并保持清晰的手术视野;术中可利用普通手术器械进行减压操作,工作效率高且费用低于单通道椎间孔镜技术。
4、ube/bess技术的优点在于手术适应症广,术后疼痛和创伤更小,vas评分、出血量、卧床和住院时间等表现出色,恢复快,并发症发生率低,能更好地保护椎间稳定性。
5、在进行手术时,病人侧卧,医生的手臂长时间悬空,极易造成疲劳,特别是年龄大的医生来进行操作时,极易发生危险。
6、申请号为cn201910585941.9的中国发明专利医用内窥镜手术辅助支架,以及申请号为cn200510080515.8的中国发明专利鼻内镜手术支撑辅助系统都是通过支架来将设备进行支撑,使无需其他人辅助,使用方便,但是由于手术不同,在本手术中需要一种适用于支撑医生手臂的支撑装置。
技术实现思路
1、本实用新型针对现有技术的不足,提供一种内镜外辅助支撑装置,用于支撑医生的手臂,缓解疲劳,降低手术中的危险因素。
2、本实用新型是通过如下技术方案实现的,种内镜外辅助支撑装置,包括竖向滑动的支撑杆,支撑杆的顶端通过第一铰接轴铰接有支撑臂,支撑臂上开设有与手臂适配的凹槽,所述支撑杆上还设有支撑支撑臂的杠杆装置。
3、本优选方案在使用时,滑动支撑杆,使支撑臂从医生手臂下方向医生手臂移动,当医生手臂处于凹槽内,由凹槽槽底支撑或者顶至支撑臂上时,通过支撑杆的竖向移动,并将支撑杆进行固定,从而支撑医生的手臂,缓解疲劳,降低手术中的危险因素。
4、作为优选,所述支撑臂包括滑动段,以及通过第二铰接轴轴接在滑动段顶端的转动段,第一铰接轴的轴线与第二铰接轴的轴线垂直,且第二铰接轴的轴线沿竖向延伸,所述杠杆装置设置在滑动段上。
5、本优选方案通过转动段的设置,使支撑臂绕第二铰接轴转动,从而增加了支撑臂的转动范围,从而实现对支撑臂多角度的调节,从而更加方便的支撑医生的手臂。
6、作为优选,包括圆筒,所述滑动段上固接有相对设置的限位块,圆筒上的滑槽与滑动段适配,圆筒内还设有与滑槽连通且竖向延伸的两个长槽,所述长槽与限位块适配,滑槽槽底设有电动推杆,电动推杆的顶端顶至圆杆的底面上。
7、本优选方案通过电动推杆的设置,实现支撑杆沿竖向移动,通过限位块的设置,限制滑动段在圆筒内转动。
8、作为优选,所述杠杆装置包括开设有穿孔的长板,所述支撑杆插入到穿孔内,且支撑杆上轴接有与第一铰接轴轴线平行的第三铰接轴,第三铰接轴两端转动连接在长板上,位于支撑臂正下方的长板顶至支撑臂的底面上,长板上设有顶至长板顶面的的按压杆,且按压杆与支撑臂位于转动段的两侧,所述转动段上开设有若干沿竖向排布且供按压杆插入的插孔。
9、本优选方案在使用时,通过调节按压杆的位置,从而调节长板的倾斜角度,从而适应对不同角度的手臂的支撑。
10、作为优选,所述转动段上开设有若干沿周向排布的第一定位孔,所述滑动段的圆周面上也开设有若干沿其周向排布的第二定位孔,第一定位孔和第二定位孔内插设有u型的定位杆。
11、本优选方案通过将定位杆插入到第一定位孔和第二定位孔中,从而限定转动段相对滑动段的转动。
12、作为优选,所述圆筒底端固接有圆盘,圆盘的底端设有可锁万向轮。
13、本优选发案通过可锁万向轮的设置,便于圆筒的移动。
14、本实用新型的有益效果为:滑动支撑杆,使支撑臂从医生手臂下方向医生手臂移动,当医生手臂处于凹槽内,由凹槽槽底支撑或者顶至支撑臂上时,通过支撑杆的竖向移动,并将支撑杆进行固定,从而支撑医生的手臂,缓解疲劳,降低手术中的危险因素;转动段的设置,使支撑臂绕第二铰接轴转动,从而增加了支撑臂的转动范围,从而实现对支撑臂多角度的调节,从而更加方便的支撑医生的手臂;通过调节按压杆的位置,从而调节长板的倾斜角度,从而适应对不同角度的手臂的支撑。
技术特征:
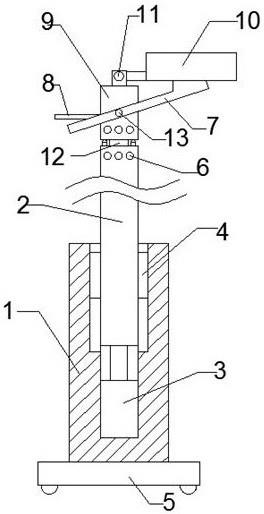
1.一种内镜外辅助支撑装置,其特征在于:包括竖向滑动的支撑杆,支撑杆的顶端通过第一铰接轴(11)铰接有支撑臂(10),支撑臂(10)上开设有与手臂适配的凹槽,所述支撑杆上还设有支撑支撑臂(10)的杠杆装置。
2.根据权利要求1所述的内镜外辅助支撑装置,其特征在于:所述支撑臂(10)包括滑动段(2),以及通过第二铰接轴(12)轴接在滑动段(2)顶端的转动段(9),第一铰接轴(11)的轴线与第二铰接轴(12)的轴线垂直,且第二铰接轴(12)的轴线沿竖向延伸,所述杠杆装置设置在滑动段(2)上。
3.根据权利要求2 所述的内镜外辅助支撑装置,其特征在于:包括圆筒(1),所述滑动段(2)上固接有相对设置的限位块(4),圆筒(1)上的滑槽与滑动段(2)适配,圆筒(1)内还设有与滑槽连通且竖向延伸的两个长槽,所述长槽与限位块(4)适配,滑槽槽底设有电动推杆(3),电动推杆(3)的顶端顶至圆杆的底面上。
4.根据权利要求2 所述的内镜外辅助支撑装置,其特征在于:所述杠杆装置包括开设有穿孔(14)的长板(7),所述支撑杆插入到穿孔(14)内,且支撑杆上轴接有与第一铰接轴(11)轴线平行的第三铰接轴(13),第三铰接轴(13)两端转动连接在长板(7)上,位于支撑臂(10)正下方的长板(7)顶至支撑臂(10)的底面上,长板(7)上设有顶至长板(7)顶面的按压杆(8),且按压杆(8)与支撑臂(10)位于转动段(9)的两侧,所述转动段(9)上开设有若干沿竖向排布且供按压杆(8)插入的插孔。
5.根据权利要求2 所述的内镜外辅助支撑装置,其特征在于:所述转动段(9)上开设有若干沿周向排布的第一定位孔,所述滑动段(2)的圆周面上也开设有若干沿其周向排布的第二定位孔(6),第一定位孔和第二定位孔(6)内插设有u型的定位杆。
6.根据权利要求3 所述的内镜外辅助支撑装置,其特征在于:所述圆筒(1)底端固接有圆盘(5),圆盘(5)的底端设有可锁万向轮。
技术总结
本技术涉及一种内镜外辅助支撑装置,包括竖向滑动的支撑杆,支撑杆的顶端通过第一铰接轴铰接有支撑臂,支撑臂上开设有与手臂适配的凹槽,支撑杆上还设有支撑支撑臂的杠杆装置。本技术在使用时,滑动支撑杆,使支撑臂从医生手臂下方向医生手臂移动,当医生手臂处于凹槽内,由凹槽槽底支撑或者顶至支撑臂上时,通过支撑杆的竖向移动,并将支撑杆进行固定,从而支撑医生的手臂,降低手术中的危险因素;转动段的设置,使支撑臂绕第二铰接轴转动,从而增加了支撑臂的转动范围,从而实现对支撑臂多角度的调节,从而更加方便的支撑医生的手臂;通过调节按压杆的位置,从而调节长板的倾斜角度,从而适应对不同角度的手臂的支撑。
技术研发人员:韩康,谭树森,张政,卞娜,宋若先
受保护的技术使用者:中国人民解放军联勤保障部队第九六〇医院
技术研发日:20230317
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!