一种整形外科手术肋软骨引导截取器的制作方法
本技术涉及整形外科手术器械领域,更具体地说,涉及一种整形外科手术肋软骨引导截取器。
背景技术:
1、自体肋软骨移植手术是一种较为常见的整形美容手术,一般是在自身的肋软骨处截取一小段对鼻子进行填充。
2、中国专利授权公告号:cn211583347u,提供了一种整形外科手术肋软骨引导截取器,此专利主要包括依次连接的第一连接部、第二连接部与截取部。第一连接部为医护人员提供握持部位,方便医护人员对整形外科手术肋软骨引导截取器施力。截取部用于对肋软骨进行截取,从而方便后续手术的展开。第一连接部与第二连接部之间采用转动连接的连接方式,从而使得医护人员可以根据实际手术操作情况与个人使用习惯对第一连接部与第二连接部之间的角度进行调节,进而对肋软骨的截取角度进行调节,方便施力,提升手术效果。
3、上述引导截取器在使用时,医护人员在对肋软骨进行截取过程中仅凭手感对截取的肋软骨宽度进行控制,导致肋软骨的截取大小容易存在误差,截取宽度过大会导致肋软骨的浪费并加剧对患者身体的伤害,截取宽度过小会影响肋软骨的使用,导致肋软骨的需要二次截取,同时会加剧对患者的伤害。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本实用新型的目的在于提供一种整形外科手术肋软骨引导截取器,它可以实现通过在截取器内部设置位移传感器,通过位移传感器对截取区内需要进行截取的肋软骨进行监测,u型限位槽的宽度减去位移传感器监测到与肋软骨的间距就是截取的肋软骨的宽度,在肋软骨的宽度达到需要的数值时,位移传感器自动向控制器发送信号,并由控制器电连电推杆启动,使u型刀片下移将肋软骨截取,该截取器可以实现对截取的肋软骨宽度严格控制,有效避免患者身体的二次伤害,提高截取器的精确性。
3、2.技术方案
4、为解决上述问题,本实用新型采用如下的技术方案。
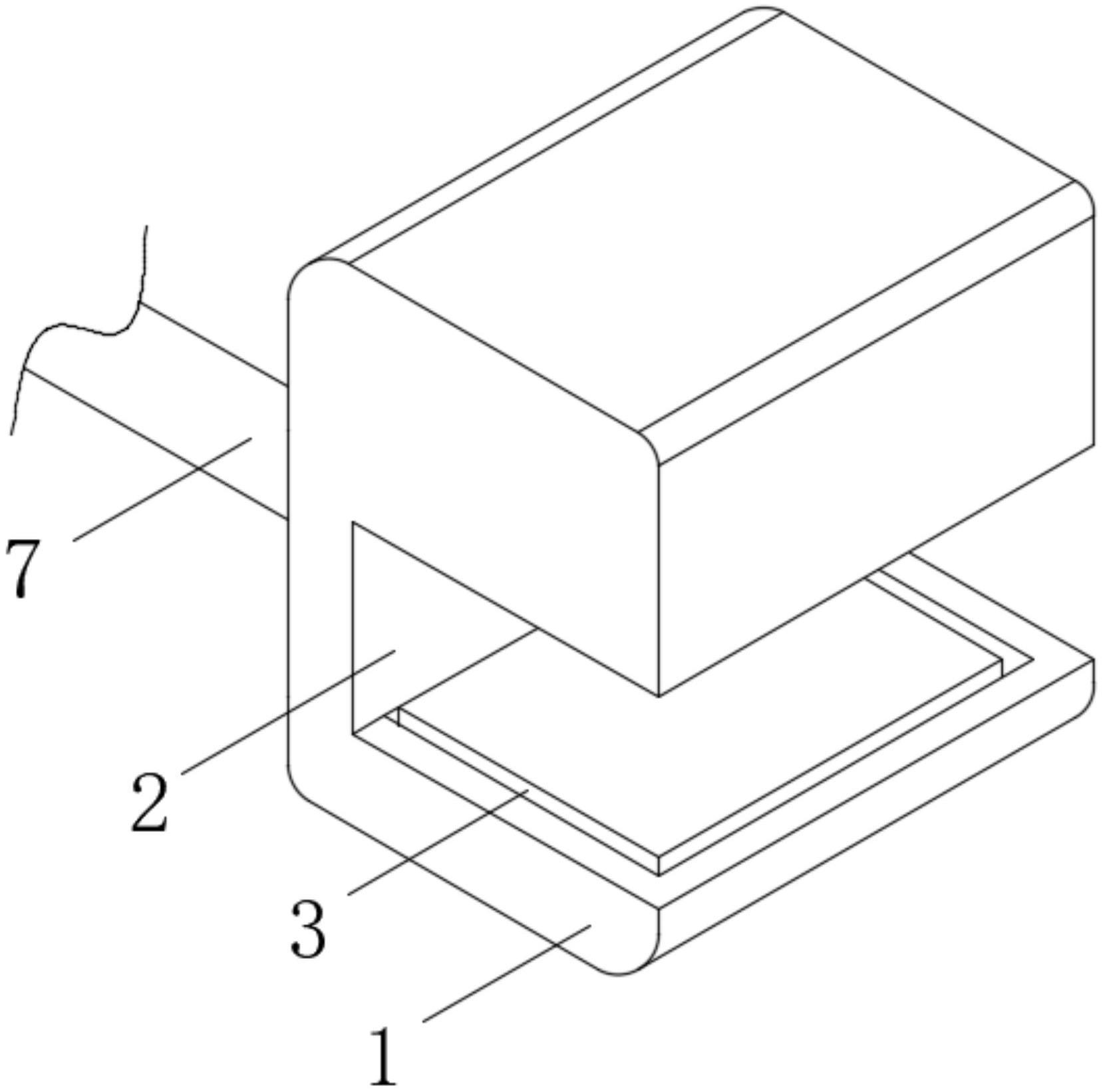
5、一种整形外科手术肋软骨引导截取器,包括整形外科肋软骨截取器本体,所述整形外科肋软骨截取器本体内部前端设置有截取区,所述截取区内底部设置有u型限位槽,所述整形外科肋软骨截取器本体内部上端设置有限位腔,所述限位腔内部安装有截取组件,所述整形外科肋软骨截取器本体内后端中部设置有位移传感器,且位移传感器位于截取区后端。医护人员在将整形外科肋软骨截取器本体安装到引导杆前部后,可将整形外科肋软骨截取器本体插入到患者的伤口处,并将整形外科肋软骨截取器本体卡在患者肋软骨外侧,通过位移传感器可监测肋软骨在截取区内部的位置。
6、进一步的,所述整形外科肋软骨截取器本体后端中部固定连接有连接筒,所述连接筒内前端设置有第一导电片,所述连接筒内部螺纹连接有引导杆,所述引导杆前端中部设置有第二导电片,所述第二导电片与第一导电片电性连接,使用时,将引导杆插入连接筒内部,并转动引导杆,使第一导电片和第二导电片接触通电。
7、进一步的,所述引导杆后端安装有控制器,所述控制器内部设置有储电模块,所述控制器与第一导电片电性连接,使用时,通过控制器可为第一导电片提供电能。
8、进一步的,所述截取组件包括导板和u型刀片,所述导板通过活动连接方式安装在限位腔内部,所述限位腔底部设置有与限位腔和截取区贯通的u型孔,所述u型刀片通过固定连接方式安装在导板下端,且u型孔、u型限位槽均与u型刀片形状相匹配,使用时,在导板和u型刀片向下移动时,u型刀片下移贯穿u型孔内部,并持续下移卡入u型限位槽内,在下移的同时,u型刀片对肋软骨进行切割截取。
9、进一步的,所述导板前端设置有限位块,所述导板后端两侧均固定连接有连接块,所述限位腔前端设置有与限位腔贯通的第一限位滑槽,所述限位腔后端两侧均设置有与限位腔贯通的第二限位滑槽,所述限位块卡设于第一限位滑槽内,所述连接块卡设于第二限位滑槽内,使用时,在导板上下移动时,连接块和限位块同时在第一限位滑槽和第二限位滑槽内部滑动,提高导板的稳定性。
10、进一步的,所述整形外科肋软骨截取器本体内后端两侧均固定嵌设有电推杆,且电推杆均设置于第二限位滑槽下端,所述电推杆内部上端设置有输出轴,所述输出轴与连接块固定连接,所述电推杆和位移传感器均与控制器电性连接,使用时,医护人员提前在控制器内输入需要的肋软骨宽度数值,通过位移传感器对肋软骨的位置进行监测,u型限位槽的宽度减去位移传感器监测到与肋软骨的间距就是截取的肋软骨的宽度,在肋软骨的宽度达到需要的数值时,控制器自动电连电推杆启动,使导板和u型刀片下移实现肋软骨的截取。
11、3.有益效果
12、相比于现有技术,本实用新型的优点在于:
13、(1)本方案可以实现通过在截取器内部设置位移传感器,通过位移传感器对截取区内需要进行截取的肋软骨进行监测,u型限位槽的宽度减去位移传感器监测到与肋软骨的间距就是截取的肋软骨的宽度,在肋软骨的宽度达到需要的数值时,位移传感器自动向控制器发送信号,并由控制器电连电推杆启动,使u型刀片下移将肋软骨截取,该截取器可以实现对截取的肋软骨宽度严格控制,有效避免患者身体的二次伤害,提高截取器的精确性。
14、(2)截取组件包括导板和u型刀片,导板通过活动连接方式安装在限位腔内部,限位腔底部设置有与限位腔和截取区贯通的u型孔,u型刀片通过固定连接方式安装在导板下端,且u型孔、u型限位槽均与u型刀片形状相匹配,在导板和u型刀片向下移动时,u型刀片下移贯穿u型孔内部,并持续下移卡入u型限位槽内,在下移的同时,u型刀片对肋软骨进行切割截取。
15、(3)导板前端设置有限位块,导板后端两侧均固定连接有连接块,限位腔前端设置有与限位腔贯通的第一限位滑槽,限位腔后端两侧均设置有与限位腔贯通的第二限位滑槽,限位块卡设于第一限位滑槽内,连接块卡设于第二限位滑槽内,在导板上下移动时,连接块和限位块同时在第一限位滑槽和第二限位滑槽内部滑动,提高导板的稳定性。
16、(4)整形外科肋软骨截取器本体内后端两侧均固定嵌设有电推杆,且电推杆均设置于第二限位滑槽下端,电推杆内部上端设置有输出轴,输出轴与连接块固定连接,电推杆和位移传感器均与控制器电性连接,医护人员提前在控制器内输入需要的肋软骨宽度数值,通过位移传感器对肋软骨的位置进行监测,u型限位槽的宽度减去位移传感器监测到与肋软骨的间距就是截取的肋软骨的宽度,在肋软骨的宽度达到需要的数值时,控制器自动电连电推杆启动,使导板和u型刀片下移实现肋软骨的截取,且截取后肋软骨密封在u型刀片内,医护人员可直接将整形外科肋软骨截取器本体取出。
技术特征:
1.一种整形外科手术肋软骨引导截取器,包括整形外科肋软骨截取器本体(1),其特征在于:所述整形外科肋软骨截取器本体(1)内部前端设置有截取区(2),所述截取区(2)内底部设置有u型限位槽(3),所述整形外科肋软骨截取器本体(1)内部上端设置有限位腔(101),所述限位腔(101)内部安装有截取组件(5),所述整形外科肋软骨截取器本体(1)内后端中部设置有位移传感器(4),且位移传感器(4)位于截取区(2)后端。
2.根据权利要求1所述的一种整形外科手术肋软骨引导截取器,其特征在于:所述整形外科肋软骨截取器本体(1)后端中部固定连接有连接筒(6),所述连接筒(6)内前端设置有第一导电片(61),所述连接筒(6)内部螺纹连接有引导杆(7),所述引导杆(7)前端中部设置有第二导电片(71),所述第二导电片(71)与第一导电片(61)电性连接。
3.根据权利要求2所述的一种整形外科手术肋软骨引导截取器,其特征在于:所述引导杆(7)后端安装有控制器,所述控制器内部设置有储电模块,所述控制器与第一导电片(61)电性连接。
4.根据权利要求1所述的一种整形外科手术肋软骨引导截取器,其特征在于:所述截取组件(5)包括导板(51)和u型刀片(52),所述导板(51)通过活动连接方式安装在限位腔(101)内部,所述限位腔(101)底部设置有与限位腔(101)和截取区(2)贯通的u型孔,所述u型刀片(52)通过固定连接方式安装在导板(51)下端,且u型孔、u型限位槽(3)均与u型刀片(52)形状相匹配。
5.根据权利要求4所述的一种整形外科手术肋软骨引导截取器,其特征在于:所述导板(51)前端设置有限位块(511),所述导板(51)后端两侧均固定连接有连接块(512),所述限位腔(101)前端设置有与限位腔(101)贯通的第一限位滑槽(102),所述限位腔(101)后端两侧均设置有与限位腔(101)贯通的第二限位滑槽(103),所述限位块(511)卡设于第一限位滑槽(102)内,所述连接块(512)卡设于第二限位滑槽(103)内。
6.根据权利要求1所述的一种整形外科手术肋软骨引导截取器,其特征在于:所述整形外科肋软骨截取器本体(1)内后端两侧均固定嵌设有电推杆(53),且电推杆(53)均设置于第二限位滑槽(103)下端,所述电推杆(53)内部上端设置有输出轴,所述输出轴与连接块(512)固定连接,所述电推杆(53)和位移传感器(4)均与控制器电性连接。
技术总结
本技术公开了一种整形外科手术肋软骨引导截取器,属于整形外科手术器械领域,一种整形外科手术肋软骨引导截取器,包括整形外科肋软骨截取器本体,整形外科肋软骨截取器本体内部前端设置有截取区,它可以实现通过在截取器内部设置位移传感器,通过位移传感器对截取区内需要进行截取的肋软骨进行监测,U型限位槽的宽度减去位移传感器监测到与肋软骨的间距就是截取的肋软骨的宽度,在肋软骨的宽度达到需要的数值时,位移传感器自动向控制器发送信号,并由控制器电连电推杆启动,使U型刀片下移将肋软骨截取,该截取器可以实现对截取的肋软骨宽度严格控制,有效避免患者身体的二次伤害,提高截取器的精确性。
技术研发人员:徐俊,郭小强,金炯
受保护的技术使用者:徐俊
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!