一种混合现实手术辅助系统及手术机器人的制作方法
本技术涉及医疗器械,尤其涉及一种混合现实手术辅助系统及手术机器人。
背景技术:
1、在对患者实施治疗前,需要对患者制定合适的治疗方案。
2、现有技术中一种普遍做法是直接在计算机屏幕中观察医学影像模型、规划手术相关内容。这种方式的缺陷在于医生只能在屏幕中调整医学影像模型进行观察,其视野受限,不便于多人讨论,并且为了确定手术相关内容在患者身上的位置,医生视线需要在屏幕与患者之间来回切换,该过程容易造成医生疲劳,另外,由于医学影像模型并不与真实患者直接对应,医生也难以在真实患者身上精确地定位手术相关内容。
3、现有技术也有“计算机+投影仪”的投影系统,医生通过调整计算机中三维模型的视角,生成投影图像,并通过投影仪将医学影像模型中的信息投影到真实空间,但是投影信息在真实空间的位置精度很差,医生需要手动调试投影仪的投影角度来优化投影效果,这种投影系统效率较低、精度较差。
4、对此,本实用新型提出一种混合现实手术辅助系统及手术机器人以解决或至少部分解决现有技术的上述缺陷。
技术实现思路
1、本实用新型提供一种混合现实手术辅助系统及手术机器人,用以解决现有技术中医生观察观察模型、手术规划不够直观,定位辅助信息在患者身上定位精度较低的缺陷。
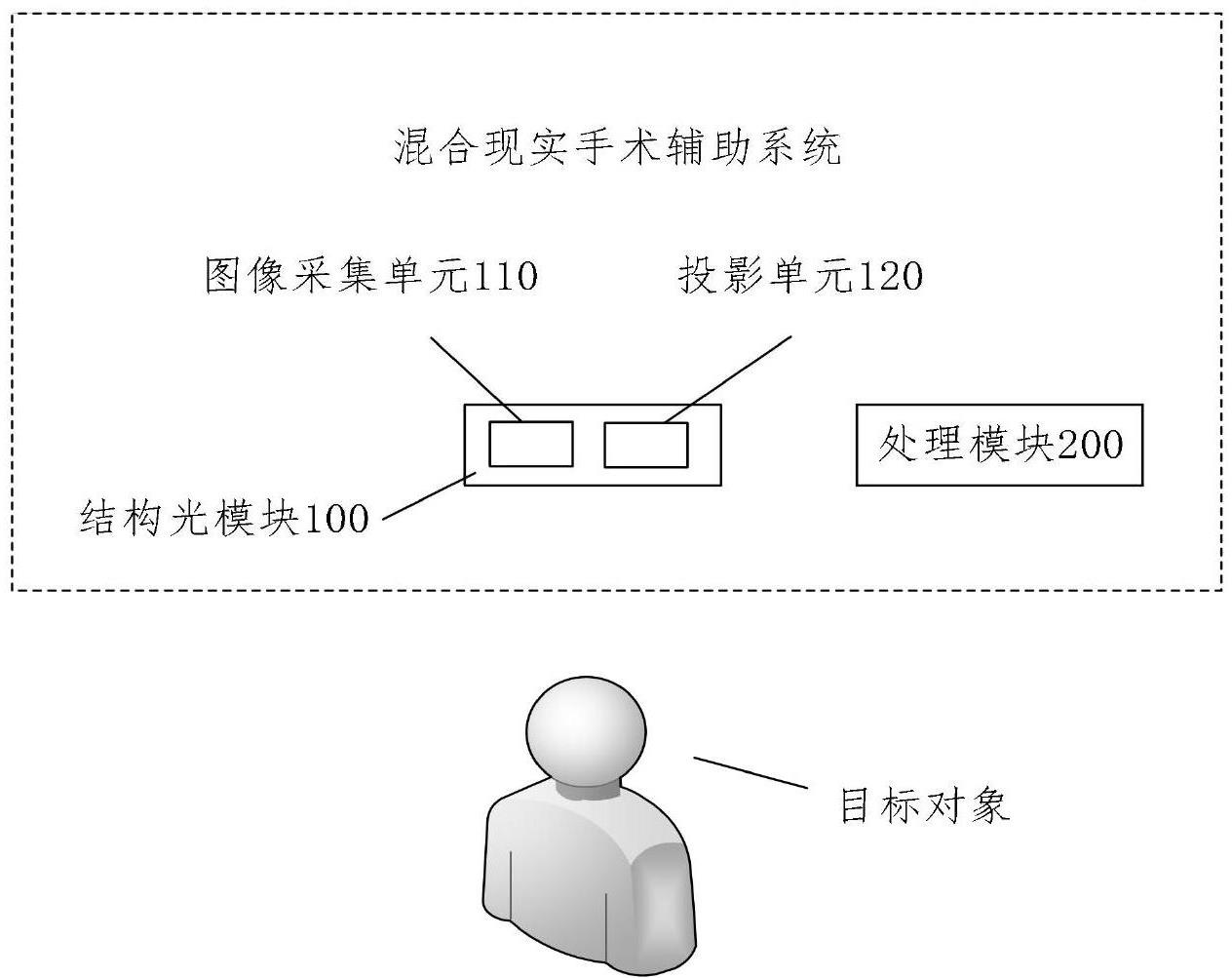
2、本实用新型提供一种一种混合现实手术辅助系统,包括:
3、结构光模块,包括相对位置固定的图像采集单元和投影单元,所述结构光模块用于采集目标对象数据,所述投影单元还用于向目标对象投影定位辅助信息;
4、处理模块,与所述结构光模块通信连接,所述处理模块被配置为:对所述目标对象数据进行处理,生成包含所述定位辅助信息的投影图像并发送给所述结构光模块。
5、根据本实用新型提供的一种混合现实手术辅助系统,一个所述图像采集单元与至少一个所述投影单元构成结构光点云采集器。
6、根据本实用新型提供的一种混合现实手术辅助系统,所述结构光模块包括两个所述图像采集单元,两个所述图像采集单元构成双目相机;
7、或,所述结构光模块包括三个或更多个所述图像采集单元,三个或更多个所述图像采集单元构成多目相机。
8、根据本实用新型提供的一种混合现实手术辅助系统,系统还包括:
9、显示模块,所述显示模块与所述处理模块通信连接,所述显示模块用于显示所述定位辅助信息与所述图像采集单元采集的目标对象实景图像的叠加图像。
10、根据本实用新型提供的一种混合现实手术辅助系统,系统还包括固定模块,用于将所述结构光模块固定在所需位置。
11、根据本实用新型提供的一种混合现实手术辅助系统,所述固定模块可以采用以下任一结构:固定连接结构、与安装位置相配合的安装结构。
12、根据本实用新型提供的一种混合现实手术辅助系统,所述固定连接结构为固定支架或折叠支架或垂直悬挂结构或关节臂组件。
13、根据本实用新型提供的一种混合现实手术辅助系统,所述与安装位置相配合的安装结构是插接结构、螺纹安装结构或夹持结构。
14、根据本实用新型提供的一种混合现实手术辅助系统,系统包括多组所述固定模块和所述结构光模块,以实现多角度的点云投影。
15、本实用新型还提供一种手术机器人,包括:
16、前述任一项的混合现实手术辅助系统,以及机械臂;
17、所述结构光模块安装或集成在所述机械臂上;
18、所述处理模块与所述机械臂通信连接,用于控制所述机械臂带动所述结构光模块运动到目标位置。
19、根据本实用新型提供的一种手术机器人,机器人还包括:定位器;
20、所述定位器安装或集成在所述机械臂上,所述定位器包括器械定位通道。
21、本实用新型的提供的一种混合现实手术辅助系统及手术机器人,至少具有以下有益效果:
22、1、能够将需要观察的虚拟信息与相机视角的实景图像叠加显示,提升了信息密度,用户可以根据目标对象及目标对象上叠加显示的虚拟信息直观地进行教学、手术规划、手术导航等内容,降低了医生对于虚拟信息在患者身上位置的理解难度。
23、3、通过处理模块生成投影仪“视角”下的投影图像,并通过投影仪准确地投影至目标对象表面,无需通过追踪设备检测投影落点是否符合预期,也无需耗时调整投影仪角度、修正投影效果,投影效率更高,投影更加精确。
24、4、结构光模块具有采集点云、投影的双重作用,处理模块进行数据处理生成投影图像,整个系统结构简洁,成本低廉,更有利于市场推广。
25、5、系统提供结构光点云、双目、多目的多种点云采集方式,满足不同的场景需求、投影精度需求、成本需求。
技术特征:
1.一种混合现实手术辅助系统,其特征在于,包括:
2.根据权利要求1所述的混合现实手术辅助系统,其特征在于,一个所述图像采集单元与至少一个所述投影单元构成结构光点云采集器。
3.根据权利要求1所述的混合现实手术辅助系统,其特征在于,
4.根据权利要求1所述的混合现实手术辅助系统,其特征在于,系统还包括:
5.根据权利要求1所述的混合现实手术辅助系统,其特征在于,系统还包括固定模块,用于将所述结构光模块固定在所需位置。
6.根据权利要求5所述的混合现实手术辅助系统,其特征在于,所述固定模块可以采用以下任一结构:固定连接结构、与安装位置相配合的安装结构。
7.根据权利要求6所述的混合现实手术辅助系统,其特征在于,所述固定连接结构为固定支架或折叠支架或垂直悬挂结构或关节臂组件。
8.根据权利要求6所述的混合现实手术辅助系统,其特征在于,所述与安装位置相配合的安装结构是插接结构、螺纹安装结构或夹持结构。
9.根据权利要求5-8任一项所述的混合现实手术辅助系统,其特征在于,系统包括多组所述固定模块和所述结构光模块,以实现多角度的点云投影。
10.一种手术机器人,其特征在于,包括:
11.根据权利要求10所述的一种手术机器人,其特征在于,还包括:定位器;
技术总结
本技术提供一种混合现实手术辅助系统及手术机器人,该系统包括:结构光模块,包括相对位置固定的图像采集单元和投影单元,所述结构光模块用于采集目标对象数据,所述投影单元还用于向目标对象投影定位辅助信息;处理模块,与所述结构光模块通信连接,所述处理模块被配置为:对所述目标对象数据进行处理,生成包含所述定位辅助信息的投影图像并发送给所述结构光模块。本技术中结构光模块具有采集点云辅助注册,以及投影的双重作用,处理模块用于处理点云及三维模型生成待投影图像,本技术以简洁的系统结构将定位辅助信息精确地投影到目标表面,做到“虚实结合”,便于直观地进行手术规划、手术导航、多人研讨、教学等。
技术研发人员:刘文博,旷雅唯,张文露
受保护的技术使用者:华科精准(北京)医疗科技有限公司
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!