磁棒姿态控制器多自由度助力装置及胶囊式内窥镜系统的制作方法
本发明涉及检测设备领域,特别是涉及一种磁棒姿态控制器多自由度助力装置。此外,本发明还涉及一种包括上述磁棒姿态控制器多自由度助力装置的胶囊式内窥镜系统。
背景技术:
1、手持姿态控制器是消化道胶囊式内窥镜系统的辅助装置,利用手持姿态控制器内的永磁体产生一个控制磁场,控制胶囊式内窥镜在胃腔内滚动、旋转和倾斜运动,实现对胶囊式内窥镜的运动控制和姿态调整。在临床诊断过程中,受试者首先需吞服胶囊,待胶囊进入胃部后,医生手持姿态控制器,在人体外部使其靠近被检测者胃部,并在胃部区域慢慢移动进行搜索胶囊,当姿态控制器靠近胶囊时,胶囊在外部磁场的作用下受到的磁力会越来越大,最终会使胶囊的位置发生移动,胶囊中摄像头拍摄到的景象也会发生变化,由此来判断是否找到胶囊。
2、在整个临床诊断过程中,医生需手持姿态控制器进行动作。整个姿态控制器的重量全部由医生承受,导致操作的医生劳动强度大,疲劳等问题。并且在使用中,还需要根据胶囊的位置随时对手持姿态控制器进行位置调整,加强了医生的操作强度。因此,需开发一种可以减轻医生操作姿态控制器的操作重量,且便于位置调整的手持姿态控制器关节型助力臂。
3、在现有的技术情况中,助力装置主要有底座、助力臂、末端负载以及配重块等装置组合为一体。传统的方式靠配重块的方式来调节,该方式较为简单,调整轴向位置时需要重新调节,并且在磁体端想要多自由度翻滚时不易操作,助力效果不佳,操作较为繁琐。助力方向较为单一,在对多自由度方向助力时的效果较差。
4、因此,如何提供一种便于位置调整的磁棒姿态控制器多自由度助力装置是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本发明的目的是提供一种磁棒姿态控制器多自由度助力装置,通过牵引机构调节手持式磁棒姿态控制器的高度,无需进行配置调节,提高工作效率,减少繁琐的调节工作。本发明的另一目的是提供一种包括上述磁棒姿态控制器多自由度助力装置的胶囊式内窥镜系统。
2、为解决上述技术问题,本发明提供一种磁棒姿态控制器多自由度助力装置,包括底座、支撑杆、牵引机构、支撑转台、横臂和牵引绳,竖直的所述支撑杆下端及所述牵引机构固定连接所述底座,所述支撑转台安装于所述支撑杆上端,水平的所述横臂后端连接所述支撑转台,使所述横臂能够绕竖直轴线转动,所述牵引绳的首端连接所述牵引机构,所述牵引绳的末端绕过所述横臂上的滚轮后向下延伸,并悬挂手持式磁棒姿态控制器,所述牵引机构通过所述牵引绳调节所述手持式磁棒姿态控制器的高度。
3、优选地,所述牵引机构具体为竖直布置的伸缩气缸,所述伸缩气缸的伸出端连接牵引绳的首端。
4、优选地,所述横臂后端设置有后滚轮,所述横臂前端设置有两个相互靠近的前滚轮,所述牵引绳依次绕过所述后滚轮和两个所述前滚轮后向下延伸,各滚轮的旋转轴线水平布置并垂直于所述横臂的延伸方向。
5、优选地,所述横臂前端设置有水平延伸的滑槽,所述前滚轮安装于所述滑槽内并能够沿所述滑槽移动,所述横臂上设置有固定所述前滚轮位置的锁定结构。
6、优选地,所述支撑转台包括竖直布置的套筒、转轴和支撑座,所述套筒的下端固定连接所述支撑杆的上端,所述转轴的下端插入所述套筒内,且两者之间设置有轴承,所述转轴的上端连接所述支撑座的下端,所述支撑座的上端连接所述横臂后端。
7、优选地,所述套筒下端和所述支撑杆上端通过法兰及螺栓连接,所述支撑座上端和所述横梁后端通过环形布置的螺栓连接。
8、优选地,还包括水平布置的旋转调节盘,所述旋转调节盘上端通过多个平衡绳连接所述牵引绳末端,多个所述平衡绳的下端与所述旋转调节盘上端的连接处呈圆周均匀布置,多个所述平衡绳的上端共同连接所述牵引绳末端,所述旋转调节盘下端通过两个吊装绳连接所述手持式磁棒姿态控制器的两端。
9、优选地,所述旋转调节盘包括同轴布置外环和内环,所述内环安装于所述外环内部,且两者之间设置有导向结构,使所述内环能够相对于所述外环转动,所述外环上端面连接所述平衡绳,所述内环内侧面连接所述吊装绳。
10、优选地,所述外环上端面安装有均匀布置的四个平衡吊环,四个所述平衡绳的下端分别连接所述平衡吊环,所述内环内侧面安装有相对布置的两个吊装吊环,两个所述吊装绳的上端分别连接所述吊装吊环。
11、本发明提供一种胶囊式内窥镜系统,包括如上述任意一项所述的磁棒姿态控制器多自由度助力装置。
12、本发明提供一种磁棒姿态控制器多自由度助力装置,包括底座、支撑杆、牵引机构、支撑转台、横臂和牵引绳,竖直的支撑杆下端及牵引机构固定连接底座,支撑转台安装于支撑杆上端,水平的横臂后端连接支撑转台,使横臂能够绕竖直轴线转动,牵引绳的首端连接牵引机构,牵引绳的末端绕过横臂上的滚轮后向下延伸,并悬挂手持式磁棒姿态控制器,牵引机构通过牵引绳调节手持式磁棒姿态控制器的高度。
13、工作过程中,由牵引绳悬挂手持式磁棒姿态控制器,牵引绳能在一定范围内摆动加上支撑转台的水平旋转,通过支撑转台调整水平位置,通过牵引机构调节手持式磁棒姿态控制器的高度,无需进行配置调节,仅需要控制牵引机构即可,提高控制精度,操作适应性强,提高工作效率,减少繁琐的调节工作,降低操作人员的劳动强度。
14、本发明还提供一种包括上述磁棒姿态控制器多自由度助力装置的胶囊式内窥镜系统,由于上述磁棒姿态控制器多自由度助力装置具有上述技术效果,上述胶囊式内窥镜系统也应具有同样的技术效果,在此不再详细介绍。
技术特征:
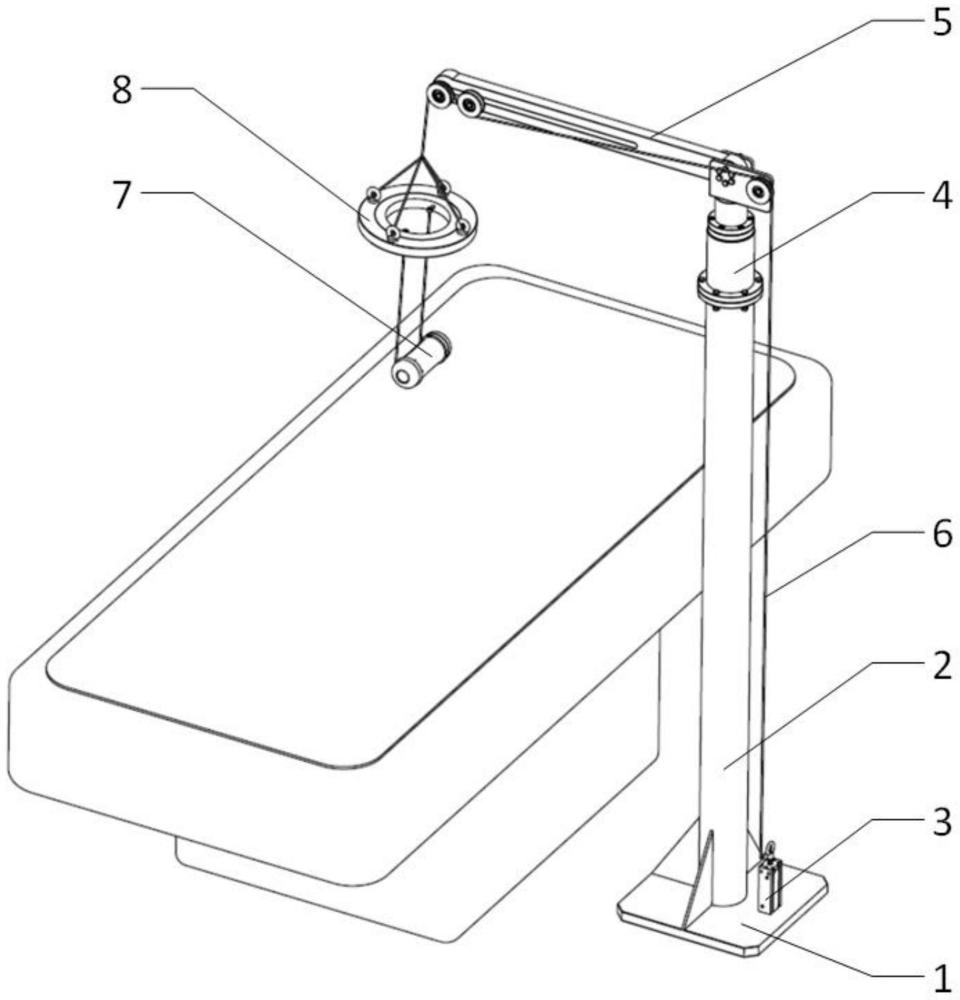
1.一种磁棒姿态控制器多自由度助力装置,其特征在于,包括底座(1)、支撑杆(2)、牵引机构(3)、支撑转台(4)、横臂(5)和牵引绳(6),竖直的所述支撑杆(2)下端及所述牵引机构(3)固定连接所述底座(1),所述支撑转台(4)安装于所述支撑杆(2)上端,水平的所述横臂(5)后端连接所述支撑转台(4),使所述横臂(5)能够绕竖直轴线转动,所述牵引绳(6)的首端连接所述牵引机构(3),所述牵引绳(6)的末端绕过所述横臂(5)上的滚轮后向下延伸,并悬挂手持式磁棒姿态控制器(7),所述牵引机构(3)通过所述牵引绳(6)调节所述手持式磁棒姿态控制器(7)的高度。
2.根据权利要求1所述的磁棒姿态控制器多自由度助力装置,其特征在于,所述牵引机构(3)具体为竖直布置的伸缩气缸,所述伸缩气缸的伸出端连接所述牵引绳(6)的首端。
3.根据权利要求1所述的磁棒姿态控制器多自由度助力装置,其特征在于,所述横臂(5)后端设置有后滚轮(51),所述横臂(5)前端设置有两个相互靠近的前滚轮(52),所述牵引绳(6)依次绕过所述后滚轮(51)和两个所述前滚轮(52)后向下延伸,各滚轮的旋转轴线水平布置并垂直于所述横臂(5)的延伸方向。
4.根据权利要求3所述的磁棒姿态控制器多自由度助力装置,其特征在于,所述横臂(5)前端设置有水平延伸的滑槽(53),所述前滚轮(52)安装于所述滑槽(53)内并能够沿所述滑槽(53)移动,所述横臂(5)上设置有固定所述前滚轮(52)位置的锁定结构。
5.根据权利要求1所述的磁棒姿态控制器多自由度助力装置,其特征在于,所述支撑转台(4)包括竖直布置的套筒(41)、转轴(42)和支撑座(43),所述套筒(41)的下端固定连接所述支撑杆(2)的上端,所述转轴(42)的下端插入所述套筒(41)内,且两者之间设置有轴承,所述转轴(42)的上端连接所述支撑座(43)的下端,所述支撑座(43)的上端连接所述横臂(5)后端。
6.根据权利要求5所述的磁棒姿态控制器多自由度助力装置,其特征在于,所述套筒(41)下端和所述支撑杆(2)上端通过法兰及螺栓连接,所述支撑座(43)上端和所述横梁后端通过环形布置的螺栓连接。
7.根据权利要求1至6任意一项所述的磁棒姿态控制器多自由度助力装置,其特征在于,还包括水平布置的旋转调节盘(8),所述旋转调节盘(8)上端通过多个平衡绳(81)连接所述牵引绳(6)末端,多个所述平衡绳(81)的下端与所述旋转调节盘(8)上端的连接处呈圆周均匀布置,多个所述平衡绳(81)的上端共同连接所述牵引绳(6)末端,所述旋转调节盘(8)下端通过两个吊装绳(82)连接所述手持式磁棒姿态控制器(7)的两端。
8.根据权利要求7所述的磁棒姿态控制器多自由度助力装置,其特征在于,所述旋转调节盘(8)包括同轴布置外环(83)和内环(84),所述内环(84)安装于所述外环(83)内部,且两者之间设置有导向结构,使所述内环(84)能够相对于所述外环(83)转动,所述外环(83)上端面连接所述平衡绳(81),所述内环(84)内侧面连接所述吊装绳(82)。
9.根据权利要求8所述的磁棒姿态控制器多自由度助力装置,其特征在于,所述外环(83)上端面安装有均匀布置的四个平衡吊环(85),四个所述平衡绳(81)的下端分别连接所述平衡吊环(85),所述内环(84)内侧面安装有相对布置的两个吊装吊环(86),两个所述吊装绳(82)的上端分别连接所述吊装吊环(86)。
10.一种胶囊式内窥镜系统,其特征在于,包括如权利要求1至9任意一项所述的磁棒姿态控制器多自由度助力装置。
技术总结
本发明公开一种磁棒姿态控制器多自由度助力装置,包括底座、支撑杆、牵引机构、支撑转台、横臂和牵引绳,竖直的支撑杆下端及牵引机构固定连接底座,支撑转台安装于支撑杆上端,水平的横臂后端连接支撑转台,使横臂能够绕竖直轴线转动,牵引绳的首端连接牵引机构,牵引绳的末端绕过横臂上的滚轮后向下延伸,并悬挂手持式磁棒姿态控制器,牵引机构通过牵引绳调节手持式磁棒姿态控制器的高度。通过牵引机构调节手持式磁棒姿态控制器的高度,无需进行配置调节,提高控制精度,操作适应性强,提高工作效率,减少繁琐的调节工作,降低操作人员的劳动强度。本发明还公开一种包括上述磁棒姿态控制器多自由度助力装置的胶囊式内窥镜系统。
技术研发人员:何鸿宇,曹波,陈容睿
受保护的技术使用者:重庆金山科技(集团)有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!