一种上肢康复训练机器人及构建方法
本发明涉及一种上肢康复训练机器人及构建方法,属于康复训练器材。
背景技术:
1、随着人口老龄化问题的不断加重,中风偏瘫患者数量在不断增加,严重影响了患者的生活质量。经研究发现,如果在运动障碍的初期得到合理且适当的康复训练,便可使受损的神经系统得到一定程度的恢复,且通过运动功能训练其康复率高达90%。目前,上肢康复训练机器人可帮助上肢运动功能障碍者促进其相关神经和肌肉康复,增加肌肉活性、改善和协调运动姿态,恢复其上肢的运动能力。
2、目前的上肢康复训练机器人多采用末端牵引的方式,可以带动患者完成各类康复训练动作,并提供了较多的康复训练模式。同时,利用较好的交互,其还可以提升患者的训练参与度,有效改善偏瘫患者的运动功能以及日常活动能力,比传统的物理治疗拥有更好的康复效果,并提供全面的患者信息和治疗数据。
3、采用末端牵引的上肢康复训练机器人一般都包括可在平面上运动的机体,机体上设置有竖直握把和水平臂托。患者将手臂置于水平臂托之上,同时用手握住垂直握把,由机体上的行走轮以末端牵引的方式带动患者手臂在平面运动以进行康复训练。
4、然而,由于人体的运动处于三维空间上,可在平面上运动的机体提供的运动范围和运动轨迹与日常行为运动规律不完全一致,不能直接反映出患者日常行为运动的缺陷。上肢运动康复训练系统的执行器还不够灵活,患者使用时活动范围和姿势受限,且无法适应不同高度的患者。与多自由度机器人相比较,虽然多自由度机器人可以弥补以上缺陷,但是多自由度机构结构复杂,运动控制难度大,成本高昂,远不具备而单自由度机构结构简单,成本低廉的应用广泛性。因此,就需要对更高层次的空间刚体导引机构进行相应的尺度综合研究,通过设计空间刚体导引机构的各零部件尺寸,从而使空间刚体机构的输出曲线满足人体上肢的康复训练需要,已经发展为了康复训练器材技术领域一个亟待解决的重要问题。
技术实现思路
1、本发明的目的在于提供一种上肢康复训练机器人及构建方法,能够适应不同的患者,且运动范围和运动轨迹灵活,可做不同姿势的康复训练。
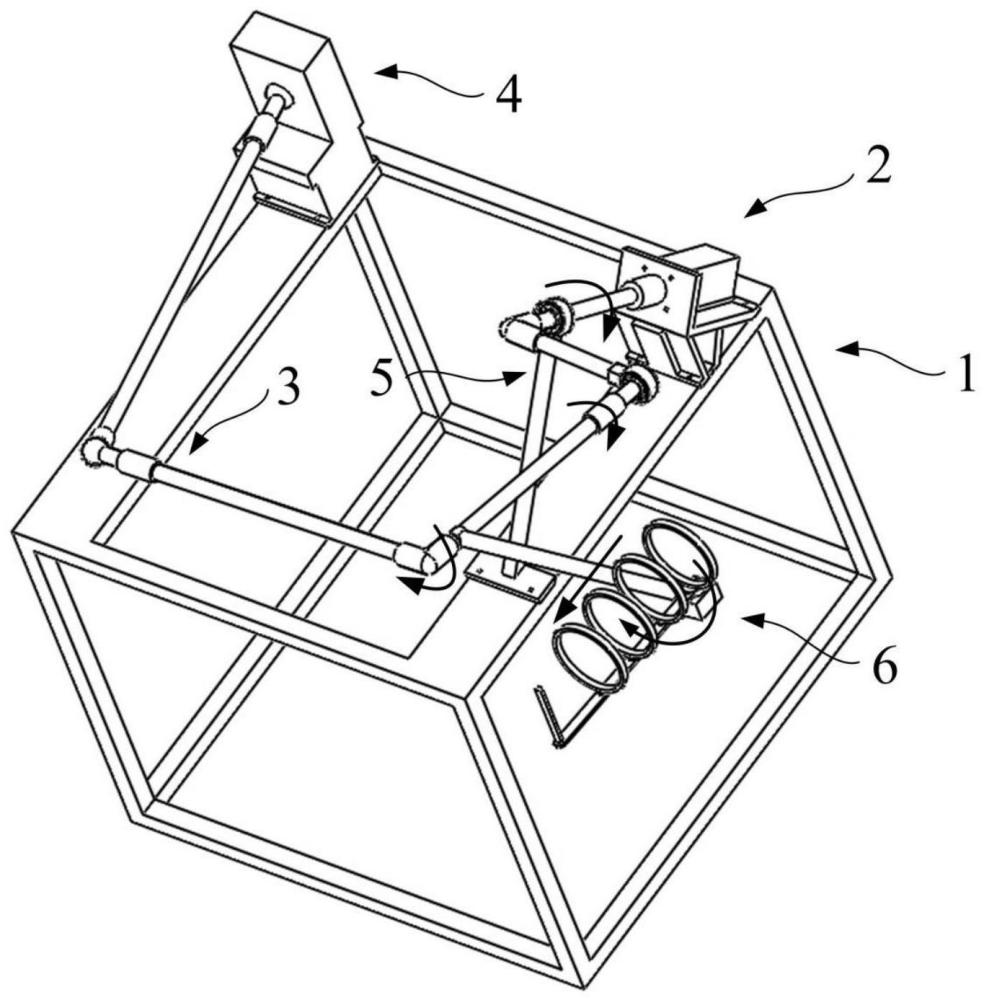
2、一种上肢康复训练机器人,包括机架、驱动组件、转动装置、球面副底座和引导装置;
3、所述驱动组件设在机架顶部一端,所述球面副底座设在机架顶部与驱动组件同侧的另一端;
4、所述转动装置一端与驱动组件转动连接,另一端与球面副底座活动连接;
5、所述转动装置与机架之间设有支撑装置,所述支撑装置一端与转动装置转动连接,另一端与机架固定连接;
6、所述引导装置用于放置上肢,所述引导装置与转动装置连接,所述驱动组件带动所述转动装置圆周转动,进一步带动所述引导装置圆周摆动,实现上肢康复训练。
7、进一步地,所述转动装置包括输入构件一、输入构件二、连杆一、连杆二和连架杆,所述输入构件一一端与驱动组件连接,另一端通过直角连接件与输入构件二的一端连接,所述输入构件二的另一端通过带座轴承与连杆一的一端转动连接,所述连杆一的另一端通过直角连接件与连杆二的一端连接,所述连杆二的另一端通过球面副一与连架杆呈直角活动连接,所述连架杆与球面副底座活动连接。
8、进一步地,所述竖直握把通过水平臂托与引导杆连接。
9、进一步地,所述球面副底座包括球面副二、支撑结构和固定结构,所述球面副二与连架杆连接,所述球面副二活动设于支撑结构上,所述固定结构与机架连接。
10、进一步地,所述驱动组件包括电机、电机竖支撑板、电机横支撑板和电机固定板,所述电机竖支撑板和电机横支撑板倾斜放置于电机固定板之下用于支撑电机固定板。
11、进一步地,所述支撑装置包括带座轴承和支撑杆,所述带座轴承设于转动装置上,所述支撑杆一端与带座轴承连接,另一端与机架连接。
12、一种上肢康复训练机器人构建方法,其特征在于,所述方法包括:
13、步骤1,采集人体上肢康复运动轨迹曲线,并对其进行离散化处理,得到目标刚体标线;
14、步骤2,依据机构学理论,构建空间连杆机构的运动型模型,推导刚体标线上对应点的参数方程;
15、步骤3,对目标刚体标线进行预处理,确定设计机构的输入时标;
16、步骤4,建立机构尺寸型数据库,完成机构尺寸型的匹配识别设计;
17、步骤5,利用优化算法对各项参数进行整体优化,更加贴近目标刚体标线;
18、步骤6,根据设计尺寸建立3维模型,完成上肢康复训练机器人构建。
19、进一步地,所述步骤2中,根据机构学理论,空间连杆机构的运动型模型,推导刚体标线上对应点的参数方程包括,设ab为输入构件、cd为连杆、de为连架杆、ef为机架;od-xdydzd为固定坐标系,其中,坐标原点od与机架f点重合,zd轴与输入构件旋转轴重合,xd轴与过球副中心e所作zd轴垂线重合;rrss机构各构件杆长ab、cd、de、ef、fa、bc分别为a1、a2、a3、a4、s1、s2;
20、输入构件和连杆固结有相应坐标系(o′-x′y′z′和o″-x″y″z″),其中,坐标系o′-x′y′z′的原点o′与c点重合,x′轴与过球副中心d所作轴线o′d重合,z′轴与过b点所作x′轴垂线重合;坐标系o″-x″y″z″的原点o″与b点重合,z″轴与z′轴重合,x″轴与过b点所作输入构件旋转轴垂线重合;α12为输入构件旋转轴与连杆旋转轴的夹角,θ2为连杆转角,rp,αpxy,αpz为p点位置参数,rq,αqxy,αqz为q点位置参数;其中,rp为cp长度;αpxy为x′轴与cp在o′x′y′平面上投影的夹角;αpz为cp与z′轴的夹角;rq为cq长度;αqxy为x′轴与cq在o′x′y′平面上投影的夹角;αqz为cq与z′轴的夹角,θ1为输入角;og-xgygzg是全局坐标系;
21、对于处于标准安装位置下的空间rrss机构,坐标系od-xdydzd与坐标系og-xgygzg重合,根据各构件之间的几何关系,得到连杆上任意一点p、q在全局坐标系og-xgygzg上的坐标;
22、将标准安装位置的rrss机构沿全局坐标系og-xgygzg的xg轴、yg轴、zg轴分别平移ox、oy、oz,得到偏移安装位置的空间rrss机构,同时得到偏移安装位置的空间rrss机构的刚体标线上的采样点pt和qt在全局坐标系og-xgygzg上的坐标;
23、将偏移安装位置的rrss机构分别绕xg轴、yg轴、zg轴旋转θx、θy、θz得到目标安装位置的空间rrss机构,同时得到目标安装位置的空间rrss机构的刚体标线上的采样点pg和qg在全局坐标系og-xgygzg上的坐标。
24、进一步地,所述步骤3中,对目标刚体标线进行预处理方法,确定设计机构的输入时标的方法包括:
25、步骤3-1,将刚体标线以zd轴为旋转轴做顺时针旋转,旋转角度为输入时标;
26、步骤3-2,将刚体标线绕xg轴逆时针旋转输入构件旋转轴与连杆旋转轴的夹角;
27、步骤3-3,利用预处理后我们发现并提取的特征,可以通过建造数据库的方法匹配识别出机构安装角度参数(θx、θy、θz),起始输入角(1θ1),和输入构件旋转轴与连杆旋转轴的夹角(α12)。并以此计算出机构安装位置参数(ox、oy),机构的连杆转角的差值(δθ2=n+1θ2-nθ2)以及机构的输入时标。
28、进一步地,所述步骤4中,建立机构尺寸型数据库,与利用步骤3-3计算得到的机构的连杆转角的差值进行匹配识别确定机构尺寸型。
29、与现有技术相比,本发明所达到的有益效果:
30、(1)鉴于不同患者存在上肢长度差异,本发明可以通过调节水平臂托方向以及手臂固定环直径,使患者上肢能够无阻碍跟随上肢康复训练机构进行被动训练,根据病人具体情况与需求调节转动装置各个部件的长度,满足患者不同活动范围和运动姿态的康复训练;
31、(2)本发明通过各连杆机构配合,使得人体上肢的运动轨迹更加多样化,使患者可以获得更加准确高效的训练,即通过电机转动以及联轴器带动输入构件、输入构件带动引导装置及连杆、连杆带动连架杆,最后连架杆与球面副底座连接,整体机构结构紧凑,训练路径稳定高效,确保患者上肢的康复训练;
32、(3)本发明中的训练强度是可调的:在命令窗口设置训练强度及训练方向,通过动力线与驱动器通信,驱动器根据接收到的指令控制电机的转动速度及转动方向实现的不同的训练强度,电机输出大小不同的力带动患者上肢进行不同速度的康复训练;
33、(4)本发明中的结构成本低廉:相较于现有的多自由度上肢外骨骼式康复训练机器人制造及维修成本高等问题,本发明中各个部件结构相对简单,制造成本较低且在破损情况下便于拆卸装换,在保证康复训练成果的前提下,可以广泛推广于康复医疗领域;
34、综上所述,本发明结构精巧,便于患者进行多种姿态的训练,训练过程中能够实时根据患者康复状态以调整训练强度,确保了康复训练过程中的安全性,具有广阔的市场前景。
- 还没有人留言评论。精彩留言会获得点赞!