一种下肢步态识别装置与方法、下肢外骨骼系统
本公开属于助力或康复机器人控制,具体涉及一种下肢步态识别装置与方法、下肢外骨骼系统。
背景技术:
1、我国老龄化问题逐渐加剧,随着人们年龄增长,出现乏力、步行困难等症状的情况逐渐普遍。因此,老年人对助力型外骨骼的需求不断增加,面对该需求,国内外的研究机构纷纷投入力量进行外骨骼机器人的研究。这类机器人是一种可供人体穿戴的人造设备,旨在增强人体机能并辅助人体运动。其中,下肢外骨骼机器人的目标是通过提供行走或跑步关节的辅助力矩,降低代谢成本,以增强人体的机动性。
2、踝关节助力外骨骼技术的发展源于对下肢功能障碍患者康复和生活质量改善的需求。踝关节助力外骨骼技术的背景融合了多个学科领域的研究成果,例如,生物力学、机器人学和医学工程等学科的知识,旨在通过智能助力装置提供对踝关节的支持,促进患者的运动康复和生活自理能力,改善患者生活质量、促进康复进程方面展现出巨大的潜力。
3、踝关节作为人体运动链的重要组成部分,对于维持正常步态和平衡具有关键性作用。因此,踝关节助力外骨骼技术的涌现受到了康复医学领域的高度关注。患有下肢疾病或受伤的个体往往面临着步态不稳、运动能力下降的挑战,而踝关节助力外骨骼通过模拟正常步态,可以提供必要的支持,帮助患者更自如地行走。
4、目前的助力外骨骼主要有穿戴式柔性下肢助力外骨骼、刚柔混合的下肢助力外骨骼等,在上述外骨骼助力装置中均需要设置识别步态的传感系统,例如,惯性传感器,将其设置于鞋的底部,该惯性传感器还包括加速度计和陀螺仪,其中,加速度计用于检测被测载体在三维空间的加速度信号,陀螺仪用于检测被测载体在三维空间的角速度信号,根据角速度与加速度获取步态,以根据步态其进行助力;再例如,足部感测单元与膝部感测单元,以分别感测足底压力信息与第一、第二膝部三维角度信息,根据压力信息、第一与第二膝部三维角度信息确定步态信息;再例如,在下肢设置肌电传感器、运动传感器和足底的压力传感器,以采集行走时的肌电信号、关节角度和足底压力,以根据上述信息确定步态类别。可见,目前的助力外骨骼装置中均需要设置多个传感器,结构复杂,体积较大,检测准确率低,并且,在识别过程中需要获取多个数据,基于对多个数据计算才能确定步态,识别过程繁琐。
技术实现思路
1、本公开旨在至少解决现有技术中存在的技术问题之一,提供一种下肢步态识别装置及方法、外骨骼系统。
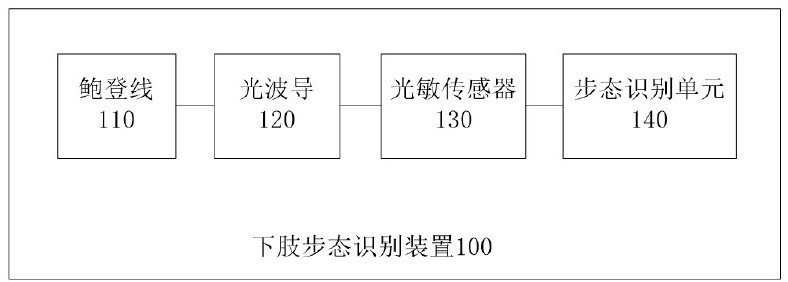
2、本公开的一方面,提供一种下肢步态识别装置,包括:
3、鲍登线、光波导、光敏传感器以及步态识别单元;
4、所述鲍登线与所述光波导贴合设置,且所述鲍登线设置于主体下肢小腿后侧,以在主体行走时产生弯曲,所述光波导随着所述鲍登线弯曲而弯曲;
5、所述光敏传感器分别与所述光波导、所述步态识别单元连接,以获取所述光波导弯曲时对应的光强损失率,所述步态识别单元根据所述光强损失率拟合得出主体行走时对应的步态相位。
6、可选地,所述鲍登线与下肢之间设置有第一固定件与第二固定件;其中,
7、所述第一固定件位于裸关节距骨位置处,所述第二固定件位于膝盖后方的腘窝位置处。
8、可选地,所述光波导的光强损失率与弯曲角度的关系式如下:
9、 θ= h( r);
10、其中, θ为光波导的弯曲角度, h( r)为弯曲角度关于弯曲半径的函数;
11、;
12、式中, r为光波导弯曲半径, a eff为光波导的有效面积, β1为光波导芯层传播常数, β2为光波导包层传播常数, w()为lambert w函数, α为光强损失率。
13、可选地,所述步态识别单元采用bp神经网络模型;其中,
14、bp神经网络模型的输入值为光强损失率,输出值为步态相位。
15、可选地,光强损失率作为输入值,步态相位作为输出值,构建形成bp神经网络模型。
16、可选地,所述步态相位包括步态开始、步态结束以及支撑步态。
17、本公开的另一方面,提出一种下肢外骨骼系统,包括:驱动装置以及前文记载的所述下肢步态识别装置;其中,
18、所述驱动装置分别与鲍登线以及步态识别单元连接,在所述步态识别单元识别出的步态相位为步态开始时,所述驱动装置通过所述鲍登线向外骨骼提供助力。
19、本公开的另一方面,提出一种下肢步态识别方法,包括:
20、将鲍登线与光波导相贴合,并将所述鲍登线设置于主体下肢小腿后侧;
21、在主体行走时,获取所述光波导弯曲时对应的光强损失率;
22、根据所述光强损失率拟合得出主体行走时的步态相位。
23、可选地,所述鲍登线的弯曲角度与所述光波导的光强损失率以及主体的步态相位具有一一对应关系。
24、可选地,所述方法还包括:
25、构建所述光强损失率与所述步态相位相关联的bp神经网络模型。
26、本公开提供一种下肢步态识别装置及方法、外骨骼系统,识别装置包括:鲍登线、光波导、光敏传感器以及步态识别单元;所述鲍登线与所述光波导贴合设置,且所述鲍登线设置于主体下肢小腿后侧,以在主体行走时产生弯曲,光波导随着鲍登线弯曲而弯曲;光敏传感器分别与所述光波导、步态识别单元连接,以获取光波导弯曲时对应的光强损失率,步态识别单元根据光强损失率拟合得出主体行走时对应的步态相位。本公开将光波导附着于鲍登线表面,通过实时反馈光波导的光强损失率,并在此基础上引入bp神经网络训练的步态识别算法,通过对光强损失率的拟合可实现对人行走步态的精准估计,准确率较高,不需要imu、肌电、足底压力或者角度传感器等一系列外部设备,可以大大简化踝关节装置体积,降低成本。
技术特征:
1.一种下肢步态识别装置,其特征在于,包括:鲍登线、光波导、光敏传感器以及步态识别单元;
2.根据权利要求1所述的下肢步态识别装置,其特征在于,所述鲍登线与下肢之间设置有第一固定件与第二固定件;其中,
3.根据权利要求1所述的下肢步态识别装置,其特征在于,所述光波导的光强损失率与弯曲角度的关系式如下:
4.根据权利要求1所述的下肢步态识别装置,其特征在于,所述步态识别单元采用bp神经网络模型;其中,
5.根据权利要求4所述的下肢步态识别装置,其特征在于,所述步态相位包括步态开始、步态结束以及支撑步态。
6.一种下肢外骨骼系统,其特征在于,包括:驱动装置以及权利要求1至5任一项所述的下肢步态识别装置;其中,
7.一种下肢步态识别方法,其特征在于,包括:
8.根据权利要求7所述的下肢步态识别方法,其特征在于,所述鲍登线的弯曲角度与所述光波导的光强损失率以及主体的步态相位具有一一对应关系。
9.根据权利要求7所述的下肢步态识别方法,其特征在于,所述方法还包括:
10.根据权利要求7所述的下肢步态识别方法,其特征在于,所述方法还包括:
技术总结
本公开提供一种下肢步态识别装置及方法、外骨骼系统,属于助力或康复机器人控制技术领域。下肢步态识别装置包括:鲍登线、光波导、光敏传感器以及步态识别单元;鲍登线与光波导贴合设置,且鲍登线设置于主体下肢小腿后侧,以在主体行走时产生弯曲,光波导随着鲍登线弯曲而弯曲;光敏传感器分别与光波导、步态识别单元连接,以获取光波导弯曲时对应的光强损失率,步态识别单元根据光强损失率拟合得出主体行走时对应的步态相位,通过对光强损失率的拟合可实现对人行走步态的精准估计,准确率较高,不需要IMU、肌电、足底压力或者角度传感器等一系列外部设备,可以大大简化踝关节装置体积,降低成本。
技术研发人员:朱培逸,温嘉懿,沈钲熬,颜健,俞涛,芈嘉豪,刘成成,阮昕玥,李彬彬,刘柱,李鑫
受保护的技术使用者:常熟理工学院
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!