器械驱动盒、手术机器人、以及零位检测方法与流程
本发明至少一实施例涉及一种器械驱动盒、手术机器人、以及零位检测方法。
背景技术:
1、微创手术机器人一般由医生控制台、患者手术平台组成。患者手术平台装配有一条或多条多轴手术臂,手术器械装备于手术臂上,器械的各种动作受器械驱动盒驱动,接收来自医生控制台的控制指令,在与手术臂动作配合下,完成相应的手术动作。
技术实现思路
1、本发明的至少一实施例提供一种器械驱动盒、手术机器人、以及零位检测方法,具体为一种器械驱动盒内的电机输出端的零位检测结构和检测方法以及含有该零位检测结构手术机器人。
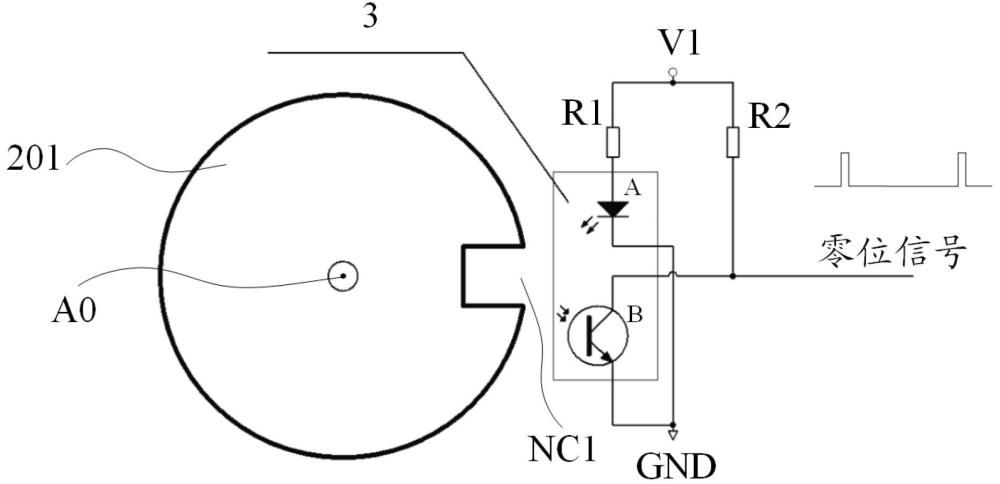
2、本发明的至少一实施例提供一种器械驱动盒,包括:安装座;上盖,与所述安装座配合以形成容纳腔;电机,位于所述容纳腔内并具有输出端;减速器,与所述电机的输出端相连并与所述电机同心设置,且具有输出轴;以及测距传感器,与所述输出轴相对设置,其中,所述电机被配置为带动所述减速器的输出轴转动,所述输出轴具有第一开槽,所述测距传感器被配置为检测其与所述减速器的输出轴之间的距离以在所述第一开槽经过所述测距传感器的位置时输出零位信号以确定所述电机的所述减速器的所述输出轴的零位。
3、例如,所述上盖具有第二开槽以形成检测腔进而使得所述输出轴和所述测距传感器在所述检测腔内彼此面对。
4、例如,所述检测腔为暗室。
5、例如,设置彼此独立的多个容纳腔,以使得多个检测腔彼此独立。
6、例如,所述第一开槽为位于所述输出轴的边缘的凹陷。
7、例如,所述测距传感器包括反射式光电检测传感器,所述测距传感器与所述减速器的所述输出轴的轴线的相对位置固定。
8、例如,所述电机和所述减速器均位于所述容纳腔内,所述器械驱动盒具有多个独立的容纳腔,在每个容纳腔内设有一个电机和与该电机相连的一个减速器,每个减速器上具有一个第一开槽。
9、例如,所述器械驱动盒具有至少五个独立的容纳腔,每个电机对应至少一个测距传感器,多个测距传感器分布于所述器械驱动盒的两侧,位于所述器械驱动盒的同一侧的至少两个测距传感器连接为一体结构。
10、本发明的至少一实施例还提供一种手术机器人,具有上述任一器械驱动盒。
11、本发明的至少一实施例还提供一种应用于手术机器人的电机的减速器的输出轴的零位检测方法,包括:采用电机带动减速器的输出轴转动;以及采用测距传感器在暗室内检测其与所述减速器的输出轴之间的距离以在所述减速器的所述输出轴上的第一开槽经过所述测距传感器的位置时输出零位信号以确定零位,所述测距传感器为反射式光电检测传感器。
技术特征:
1.一种器械驱动盒,包括:
2.根据权利要求1所述的器械驱动盒,其中,所述上盖具有第二开槽以形成检测腔进而使得所述输出轴和所述测距传感器在所述检测腔内彼此面对。
3.根据权利要求2所述的器械驱动盒,其中,所述检测腔为暗室。
4.根据权利要求1所述的器械驱动盒,其中,设置彼此独立的多个容纳腔,以使得多个检测腔彼此独立。
5.根据权利要求1所述的器械驱动盒,其中,所述第一开槽为位于所述输出轴的边缘的凹陷。
6.根据权利要求1所述的器械驱动盒,其中,所述测距传感器包括反射式光电检测传感器,所述测距传感器与所述减速器的所述输出轴的轴线的相对位置固定。
7.根据权利要求1所述的器械驱动盒,其中,所述电机和所述减速器均位于所述容纳腔内,所述器械驱动盒具有多个独立的容纳腔,在每个容纳腔内设有一个电机和与该电机相连的一个减速器,每个减速器上具有一个第一开槽。
8.根据权利要求7所述的器械驱动盒,其中,所述器械驱动盒具有至少五个独立的容纳腔,每个电机对应至少一个测距传感器,多个测距传感器分布于所述器械驱动盒的两侧,位于所述器械驱动盒的同一侧的至少两个测距传感器连接为一体结构。
9.一种手术机器人,具有根据权利要求1-8任一项所述的器械驱动盒。
10. 一种应用于手术机器人的器械驱动盒的电机输出端的零位检测方法,包括:
技术总结
本发明提供一种器械驱动盒、手术机器人、以及零位检测方法。器械驱动盒包括:安装座;上盖,与安装座配合以形成容纳腔;电机,位于容纳腔内并具有输出端;减速器,与电机的输出端相连并与电机同心设置,且具有输出轴;以及测距传感器,与输出轴相对设置,其中,电机被配置为带动减速器的输出轴转动,输出轴具有第一开槽,测距传感器被配置为检测其与减速器的输出轴之间的距离以在第一开槽经过测距传感器的位置时输出零位信号以确定电机的输出端的零位。该器械驱动盒的电机输出端的零位检测结构,结构简洁、检测可靠、工艺可靠、且成本低。
技术研发人员:金存山,史文勇
受保护的技术使用者:科弛医疗科技(北京)有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!