乒乓球收集机器人的制作方法
[0001]
本发明涉及体育器材领域的一种机器人,特别涉及一种乒乓球收集机器人。
背景技术:
[0002]
乒乓球运动是一项兼具技术性和观赏性的体育运动,充分展示了体育精神与运动激情,在全世界范围内受到人们的喜爱。伴随着乒乓球运动的火热,越来越多的人参与到其中,许多乒乓球爱好者从小就参加专业的乒乓球训练。
[0003]
在乒乓球训练中,一个专业的击球动作往往需要练习无数次,因此在训练时会使乒乓球散落满地。在训练时通过人工收集乒乓球会浪费大量时间和精力。若通过收集装置辅助收集乒乓球则可以节约大量时间,提高训练效率。现有的乒乓球收集装置主要是通过人工辅助进行半自动收集,少数装置实现了全自动的收集,却易将杂物也收入,并且受限于装置的尺寸和结构,无法在乒乓球场地的角落实现收集。总的来讲,现有的乒乓球收集装置准确度不高,收集效率有待提升。
技术实现要素:
[0004]
本发明针对现有产品存在的不足,提出了一种乒乓球收集机器人,实现了对乒乓球的准确识别和自动收集。
[0005]
本发明所采用的技术方案是:
[0006]
本发明包括图像识别机构、两个机械臂、收集机构、运动机构和控制器,收集机构安装在运动机构上,图像识别机构固定在收集机构上,两个机械臂和控制器均安装在收集机构中。
[0007]
所述收集机构包括外壳和收集盒,外壳固定在运动机构上,外壳上从上到下依次设有上层板和中层板;收集盒安装在中层板与运动机构的底板之间。所述两个机械臂对称固定于收集机构的上层板和中层板之间的两侧,每个机械臂包括气泵、吸气管、第一舵机、第一连接件、第二舵机、第二连接件、第三舵机、第三连接件和吸盘;吸气管的一端与气泵的输出端连接,吸气管的另一端与吸盘连接;第一舵机具有两个输出端,两个输出端分别同轴连接上舵盘和下舵盘,上舵盘和下舵盘与第一舵机的轴同步转动,上舵盘固定在收集机构的上层板的下表面,下舵盘固定在收集机构的中层板的上表面,第二舵机经第一连接件固接于第一舵机上,第二舵机通过第二连接件与第三舵机连接,第三连接件固接在第三舵机上,吸盘装在第三连接件上。
[0008]
所述运动机构包括压力传感器、底板、大轮、电机支架、动力电机和万向轮,底板的中心开有方形孔,压力传感器装于方形孔中,两组电机大轮组件分别两侧对称安装于底板的下方,每组电机大轮组件包括一个大轮、一个电机支架和一个动力电机,电机支架固定在底板的下表面,动力电机固定在电机支架上,动力电机的输出轴水平穿出电机支架同轴固接大轮,万向轮安装在两组电机大轮组件之间的底板的下表面后部。
[0009]
所述图像识别机构包括摄像头、转盘和电机,电机固定于收集机构的上层板的下
表面,电机的输出轴沿竖直方向穿出上层板同轴固接转盘,转盘随电机的输出轴的转动而转动;摄像头固定在转盘的边缘并朝向斜下方。
[0010]
所述控制器固定在收集机构的中层板上。
[0011]
所述控制器内部包含可充电电源。
[0012]
本发明的有益效果:
[0013]
本发明实现从乒乓球识别到收集的完整过程,整个过程实现了全自动,通过采集图像并识别,避免了将不必要的杂物收入,同时实现了避障功能,机械臂的设计使乒乓球收集机器人能够收集到角落的乒乓球,运动机构的设计使乒乓球收集机器人可快速灵活地全方位移动;总的来讲,本发明实现了乒乓球的全自动收集,并且收集过程准确高效,收集范围较广,减少了人们的体力消耗和时间消耗,可推广应用。
附图说明
[0014]
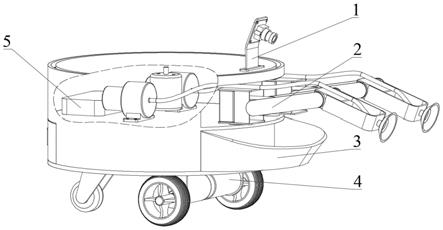
图1为本发明的整体结构示意图;
[0015]
图2为本发明图像识别机构的结构示意图;
[0016]
图3为本发明机械臂的结构示意图;
[0017]
图4为本发明第一舵机的结构示意图;
[0018]
图5为本发明收集机构的结构示意图;
[0019]
图6为本发明运动机构的结构示意图。
[0020]
图中,1-图像识别机构,2-机械臂,3-收集机构,4-运动机构,5-控制器,11-摄像头,12-转盘,13-电机,21-气泵,22-吸气管,23-第一舵机,24-第一连接件,25-第二舵机,26-第二连接件,27-第三舵机,28-第三连接件,29-吸盘,23a-上舵盘,23b-下舵盘,31-外壳,31a-上层板,31b-中层板,32-收集盒,41-压力传感器,42-底板,43-大轮,44-电机支架,45-动力电机,46-万向轮。
具体实施方式
[0021]
以下结合说明书附图及实施例对本发明做进一步的描述,但本发明并不限于这些实施例。
[0022]
如图1所示,乒乓球收集机器人包括图像识别机构1、两个机械臂2、收集机构3、运动机构4和控制器5,收集机构3安装在运动机构4上,图像识别机构1固定在收集机构3上,两个机械臂2和控制器5均安装在收集机构3中。
[0023]
如图5和图6所示,收集机构3包括外壳31和收集盒32,外壳31固定在运动机构4的底板42上,外壳31上从上到下依次设有上层板31a和中层板31b;收集盒32安装在中层板31b与运动机构4的底板42之间;收集盒32用于存放从吸盘上掉落的乒乓球,收集盒32沿水平方向从中层板31b与运动机构4的底板42之间抽出和推入。
[0024]
如图1和图3所示,两个机械臂2对称固定于收集机构3的上层板31a和中层板31b之间的两侧,每个机械臂2包括气泵21、吸气管22、第一舵机23、第一连接件24、第二舵机25、第二连接件26、第三舵机27、第三连接件28和吸盘29;吸气管22的一端与气泵21的输出端连接,吸气管22的另一端与吸盘29连接;气泵21工作使吸气管22内产生负压,从而使吸盘29具有一定的吸力吸附乒乓球,当气泵21停止工作时,吸盘29的吸力消失,乒乓球从吸盘29掉
落;第一舵机23具有两个输出端,两个输出端分别同轴连接上舵盘23a和下舵盘23b,上舵盘23a和下舵盘23b与第一舵机23的轴同步转动,上舵盘23a固定在收集机构3的上层板31a的下表面,下舵盘23b固定在收集机构3的中层板31b的上表面,第二舵机25经第一连接件24固接于第一舵机23上,第二舵机25通过第二连接件26与第三舵机27连接,第三连接件28固接在第三舵机27上,吸盘29装在第三连接件28上。
[0025]
具体实施中,第一舵机23驱动上舵盘23a和下舵盘23b转动,带动第一连接件24沿水平方向转动,具体实施的第二舵机25与第三舵机27的结构及驱动原理都与第一舵机23相同,在第一连接件24的带动下,第二舵机25带动第二连接件26沿竖直方向转动,在第二舵机25的带动下,第三舵机27带动第三连接件28和吸盘29沿竖直方向转动。
[0026]
如图6所示,运动机构4包括压力传感器41、底板42、大轮43、电机支架44、动力电机45和万向轮46,底板42的中心开有方形孔,压力传感器41装于方形孔中,两组电机大轮组件分别两侧对称安装于底板42的下方,每组电机大轮组件包括一个大轮43、一个电机支架44和一个动力电机45,电机支架44固定在底板42的下表面,动力电机45固定在电机支架44上,动力电机45的输出轴水平穿出电机支架44同轴固接大轮43,万向轮46安装在两组电机大轮组件之间的底板42的下表面后部。两个大轮43分别由与其相连的动力电机45独立控制,万向轮46随两个大轮43的运动而被动转动,万向轮46和两个大轮43形成三个支撑点,带动整个乒乓球收集机器人全方位移动。
[0027]
如图2所示,图像识别机构1包括摄像头11、转盘12和电机13,电机13固定于收集机构3的上层板31a的下表面,电机13的输出轴沿竖直方向穿出上层板31a同轴固接转盘12,转盘12的外径小于收集机构3的上层板31a的外径,转盘12随电机13的输出轴的转动而转动;摄像头11固定在转盘12的边缘并朝向斜下方,当转盘12转动时,摄像头11围绕转盘12的中心旋转。
[0028]
如图1所示,控制器5固定在收集机构3的中层板31b上,控制器5输入和输出电信号,具体实施的控制器5内部包含可充电电源,控制器5控制着整个乒乓球收集机器人的运作。
[0029]
以下是本发明的具体工作过程,对本发明的原理做进一步的描述,工作过程包括以下步骤:
[0030]
1)在乒乓球收集机器人运行时,电机13带动转盘12转动,从而带动摄像头11绕机器人的中心轴线转动,使摄像头11能够采集到机器人周围的图像,采集到的图像信号被传输到控制器5进行识别,控制器5能够识别乒乓球与障碍物。
[0031]
2)当控制器5识别到乒乓球时,控制器5会控制运动机构4向乒乓球所在的方位移动,若识别到障碍物,控制器5会控制运动机构4主动避开,乒乓球收集机器人的具体移动方法为:两个大轮43分别由与其相连的动力电机45独立控制,万向轮46随两个大轮43的运动而被动转动,当两个动力电机45的转动方向相反时,实现原地左转或原地右转,当两个动力电机45的转向相同时,实现前进或后退,以此方式实现了乒乓球收集机器人的全方位灵活移动。
[0032]
3)当乒乓球收集机器人运动到乒乓球旁,机械臂2开始工作,第一舵机23、第二舵机25、第三舵机27的协调转动使吸盘29贴合乒乓球,气泵21工作使吸气管22内产生负压,从而使吸盘29具有一定的吸力吸附乒乓球,当气泵21停止工作时,吸盘29的吸力消失,乒乓球
从吸盘29掉落,被吸附的乒乓球在机械臂2的运作下从收集盒32前部的开口放入收集盒32,两个机械臂2同时作业,可同时收集目标区域内的两个乒乓球,并且机械臂2可收集到乒乓球场地角落内的乒乓球,使收集工作高效准确。
[0033]
4)压力传感器41能够检测收集盒32的重量,当收集盒32的重量到达设定的上限,意味着收集盒32内的乒乓球数量达到收集的上限,乒乓球收集机器人会停止收集,运动到初始位置,等待人把乒乓球取出,将收集盒32抽出便可将乒乓球取出,当乒乓球被取出,乒乓球收集机器人便开始下一轮的工作,以此往复,当乒乓球收集机器人电量过低,会自动回到系统设定位置充电。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1