一种垃圾分类玩具
1.本发明涉及儿童教具,具体涉及一种垃圾分类玩具。
背景技术:
2.垃圾对人类的环境污染越来越严重,对垃圾进行分类处理已经是刻不容缓的事,很多城市已经开始出台对生活垃圾进行分类的政策,但是垃圾分类想要做的好,就必须从儿童开始抓起,让人们从小的时候就懂得要进行垃圾分类,而且还要知道如何进行垃圾分类,这样才能让人们更好的完成对垃圾的分类工作,为此,我们提出一种儿童智能语言垃圾分类辅助教具。
3.在中国申请号为201921545884.3,公告日为2020.6.9的专利文献中公开一种垃圾分类教学玩具;该玩具包括基板,基板上带有电源装置,基板正面分布有一组对应不同垃圾的垃圾按钮,基板正面上设有一组对应不同垃圾桶的垃圾桶按钮,电源装置在基板背面连接有控制电路板,垃圾按钮和垃圾桶按钮作为输入信号开关分别连接在控制电路板上,基板上设有提示对错的输出装置,输出装置连接在控制电路板上。本实用新型的结构合理、紧凑,通过在基板上设置垃圾按钮和垃圾桶按钮,选择按下垃圾按钮后再按下垃圾桶按钮,由输出装置给出分类对错提示。
4.但是该玩具只能针对垃圾按钮与垃圾桶按钮是否匹配进而给出是否正确的判断;其与使用者之间的互动效果差;很难吸引使用者的兴趣。
技术实现要素:
5.本发明提供一种互动效果好、电路稳定性好的垃圾分类玩具。
6.为达到上述目的,本发明的技术方案是:一种垃圾分类玩具,包括分类装置和控制系统;分类装置包括按键模块、显示模块和回收装置;回收装置包括回收支座、第一舵机模块和第二舵机模块;第一舵机模块位于第二舵机模块上方;回收支座包括底板、支撑支架和承托支架;支撑支架安装在底板上;承托支架安装在支撑支架上;支撑支架与底板垂直设置;第二舵机模块包括第二舵机、第二驱动齿轮、第二从动齿轮和垃圾桶;第二驱动齿轮和第二从动齿轮安装在底板上;第二舵机安装在支撑支架上;第二舵机与第二驱动齿轮连接,第二驱动齿轮与第二从动齿轮啮合;第二从动齿轮上端面设有凸起的限位件;垃圾桶下端面设有凹陷的限位槽;垃圾桶安装在第二从动齿轮上且限位件与限位槽卡合;垃圾桶内壁成形有第一储存空间、第二储存空间、第三储存空间和第四储存空间;在第一储存空间、第二储存空间、第三储存空间和第四储存空间内都安装有第一传感器;第一舵机模块包括第一舵机、拉伸装置、连接件和两个弹性件;第一舵机靠近底板的一侧设置;拉伸装置靠近底板的另一侧设置;拉伸装置包括拉伸件和拉伸支座;拉伸件安装在拉伸支座上;拉伸支座靠近第一舵机的一端设有连接部和两个复位部一;连接部位于两复位部一之间;拉伸件设有落料开口;在第一舵机上安装有舵盘;连接件连接舵盘和连接
部;承托支架包括承托件一、承托件二和承托件三;承托件一、承托件二和承托件三都设有缺口;第一舵机模块设置在缺口内;承托件二与承托件一连接且位于承托件一上方;承托件三与承托件二连接且位于承托件二上方;承托件一向靠近第一舵机方向凸设有支撑件一和支撑连杆;支撑件一位于支撑连杆内;支撑件一与支撑连杆成形有落料槽一;承托件一下端面安装有与第一传感器配合的第二传感器;第二传感器用于接收第一传感器的信号;承托件二向靠近第一舵机方向凸设有支撑件二和限位支件;限位支件设有两个;支撑件二位于两限位支件之间;支撑件二与支撑件一连接;限位支件与支撑连杆连接;在支撑件二上安装有ic卡感应模块;ic卡感应模块的上端面与限位支件的上端面平齐设置;限位支件远离第一舵机的一端设有复位部二;复位部二设有两个;承托件三向远离第一舵机方向凹陷有插入槽;ic卡感应模块的上端面与拉伸件下端面贴合且活动连接;拉伸支座活动设置在支撑连杆上,且拉伸支座位于两限位支件之间;拉伸件与插入槽配合;两弹性件连接两复位部一和两复位部二;落料开口在ic卡感应模块和落料槽一之间往复移动;控制系统包括电源模块、主控芯片、电源电路、降压电路和语音模块;电源模块与电源电路连接,电源电路与降压电路连接,降压电路的输出端与主控芯片一电源端连接;按键模块、ic卡感应模块、显示模块、语音模块、第一舵机模块和第二舵机模块分别连接在主控芯片上;所述主控芯片具有计时功能;电源模块包括电池和电池开关;电源电路包括lm2596
‑
adj芯片、电解电容e1、电解电容e2、发光二极管vd1、电容c1、电阻r1、电感l1和可调电阻rp1;电源模块的输出端与电源电6的输入端相连;电池的输出端输出6.5v电压;电源模块的输出端还与lm2596
‑
adj芯片的in端连接;lm2596
‑
adj芯片的out端连接输出端;lm2596
‑
adj芯片的gnd端接地;电解电容e1连接在lm2596
‑
adj芯片的in端与gnd端;电阻r1连接在lm2596
‑
adj芯片的fb端与gnd端;lm2596
‑
adj芯片的out端与发光二极管vd1的输出端连接,发光二极管vd1的输入端与lm2596
‑
adj芯片的gnd端连接;lm2596
‑
adj芯片的out端依次连接电感l1的一端和电解电容e2的一端,电解电容e2的另一端接地;电感l1的另一端与可调电阻rp1的调节端连接;可调电阻rp1的一端与电阻r1的一端连接;电容c1的两端分别与可调电阻rp1的调节端以及一端相连;lm2596
‑
adj芯片的off端接地,lm2596
‑
adj芯片的的输出端输出5v电压;降压电路包括ams1117
‑
3v3芯片、电容c2、电容c4、电容c7和电容c8;ams1117
‑
3v3芯片的vin端连接lm2596
‑
adj芯片的输出端;ams1117
‑
3v3芯片的vout端连接输出端;ams1117
‑
3v3芯片的gnd端接地;电容c4连接在ams1117
‑
3v3芯片的vin端与gnd端;电容c7连接在电容的vout端与gnd端;ams1117
‑
3v3芯片的vin端还连接电容c2,电容c2的输出端接地;ams1117
‑
3v3芯片的vout端连接电容c8,电容c8的输出端接地;电容c8与vout端相连的一端为降压电路的输出端,ams1117
‑
3v3芯片的输出端输出3.3v电压;主控芯片的电源端与lm2596
‑
adj芯片的输出端连接;主控芯片的pa1端与第一舵机模块连接;第一舵机模块的电源端与电源模块的输出端连接;第一舵机模块的接地端接地;主控芯片的pa0端与第二舵机模块连接;第二舵机模块的电源端与电源模块的输
出端连接;第二舵机模块的接地端接地;主控芯片的pc1端、pd14端、pc0端、pc2端和pd13端与显示模块连接;显示模块的电源端与ams1117
‑
3v3芯片的输出端连接;显示模块的接地端接地;主控芯片的pb1端、pc5端、pb2端、pa7端和pa6端与ic卡感应模块连接;ic卡感应模块的电源端与ams1117
‑
3v3芯片的输出端连接;ic卡感应模块的接地端接地;主控芯片的pd10端、pa2端和pa3端与语音模块连接;语音模块的电源端与lm2596
‑
adj芯片的输出端连接;语音模块的接地端接地;主控芯片的pb3端、pe3端、pe2端、pe1端、pb9端、pc3端和pa4端与按键模块连接;按键模块的接地端接地。
7.以上设置,分类装置通过按键模块输入信号;通过显示模块显示当前的分类结果;通过回收装置实现对ic卡的回收;通过第二舵机驱动垃圾桶转动;同时垃圾桶内上有第一储存空间、第二储存空间、第三储存空间和第四储存空间;这样不同的ic卡回收到不同的储存空间内实现对垃圾分类的教学;同时拉伸装置是活动设置在支撑连杆上;当第一舵机驱动拉伸装置靠近第一舵机移动时;落料开口会与落料槽一连通,同时因为ic卡感应模块的上端面与拉伸件下端面贴合且活动连接;ic卡穿过落料开口将放置在ic卡感应模块上;当拉伸装置移动时会带动ic卡移动;进而ic卡从落料槽一掉落到垃圾桶内;通过在复位部一与复位部二之间连接弹性件,在连接舵盘和连接部之间连接连接件,第一舵机动作时;克服弹性件的弹力带动拉伸装置移动的,当第一舵机停止转动后;弹性件回复初始状态,在弹性件自身的弹力作用下带动拉伸装置靠近插入槽且与插入槽贴合;这样方便控制。
8.控制系统通过电池的输出端输出6.5v电压为第一舵机模块、第二舵机模块和电源电路供电;通过lm2596
‑
adj芯片的的输出端输出5v电压为降压电路、语音模块和主控芯片供电;通过ams1117
‑
3v3芯片的输出端输出3.3v电压为显示模块和ic感应模块供电。
9.进一步的,控制系统还包括led模块;主控芯片的pc6端、pd6端、pc7端、pd7端、pe4端、pe5端和pd15端与led模块连接;led模块的电源端与ams1117
‑
3v3芯片的输出端连接;led模块的接地端接地。通过设置led模块,主控芯片控制led模块进行led显示。
10.进一步的,在第一舵机模块的电源端与电源模块的输出端之间连接有电容c3。通过电容c3稳定电压电流让第一舵机模块工作更稳定。
11.进一步的,在第二舵机模块的电源端与电源模块的输出端之间连接有电容c9。通过电容c9稳定电压电流让第二舵机模块工作更稳定。
12.进一步的,在显示模块的电源端与ams1117
‑
3v3芯片的输出端之间连接有电容c6。通过电容c6稳定电压电流让显示模块工作更稳定。
13.进一步的,在ic卡感应模块的电源端与ams1117
‑
3v3芯片的输出端之间连接有电容c5。通过电容c5稳定电压电流让ic卡感应模块工作更稳定。
14.进一步的,按键模块包括第一按键、第二按键、第三按键、第四按键、第五按键和第六按键;第一按键与主控芯片的pb3端连接;第二按键与主控芯片的pe 3端连接;第三按键与主控芯片的pe2端连接;第四按键与主控芯片的pe1端连接;第五按键与主控芯片的pb9端连接;第六按键与主控芯片的pc3端连接;第七按键与主控芯片的pa4端连接。通过设置不同的按键与主控芯片的不同连接端连接;这样通过不同按键实现不同的人机交互效果;进而
互动效果好。
15.进一步的,所述支撑支架包括限位板;限位板设置在第一舵机和拉伸装置之间;限位板与拉伸装置垂直设置,限位板设有限位通孔;连接件的一端与连接部连接,连接件的另一端穿过限位通孔与舵盘连接。这样能对拉伸装置的移动进行限位。
附图说明
16.图1为本发明的按键模块、显示模块、第一舵机模块、第二舵机模块和ic卡感应模块与控制系统连接的示意图。
17.图2为本发明的主控芯片的示意图。
18.图3为本发明的电源模块的示意图。
19.图4为本发明的电源电路的示意图。
20.图5为本发明的降压电路的示意图。
21.图6为本发明的第一舵机模块的示意图。
22.图7为本发明的第二舵机模块的示意图。
23.图8为本发明的显示模块的示意图。
24.图9为本发明中的语音模块的示意图。
25.图10为本发明的ic卡感应模块的示意图。
26.图11为本发明的按键模块的示意图。
27.图12为本发明的led模块的示意图。
28.图13为本发明的分类装置的立体结构示意图。
29.图14为本发明的分类装置去除垃圾桶和承托盖板的立体结构示意图。
30.图15为本发明的分类装置去除承托盖板的立体结构示意图。
31.图16为本发明的承托支架的立体结构示意图。
32.图17为本发明的承托支架的分解图。
33.图18为图15中a的放大图。
34.图19为本发明的垃圾桶的立体结构示意图。
35.图20为本发明的垃圾桶的另一视角的立体结构示意图。
36.图21为本发明的承托件一、承托件二和承托件三与第一舵机模块配合的示意图。
37.图22为本发明的第一舵机模块的使用状态图。
具体实施方式
38.下面结合附图和具体实施方式对本发明做进一步详细说明。
39.如图1
‑
21所示;一种垃圾分类玩具,包括分类装置和控制系统;分类装置包括按键模块1、显示模块2和回收装置3;回收装置3包括回收支座31、第一舵机模块32和第二舵机模块33;第一舵机模块32位于第二舵机模块33上方;回收支座31包括底板311、支撑支架312和承托支架313;支撑支架312安装在底板311上;承托支架313安装在支撑支架312上;支撑支架312与底板311垂直设置。在本实施例中,显示模块为显示屏。
40.如图14、15、18
‑
20所示;第二舵机模块33包括第二舵机331、第二驱动齿轮332、第二从动齿轮333和垃圾桶334;第二驱动齿轮332和第二从动齿轮333安装在底板311上;第二
舵机安装在支撑支架312上;第二舵机与第二驱动齿轮332连接,第二驱动齿轮332与第二从动齿轮333啮合;第二从动齿轮333上端面设有凸起的限位件335;垃圾桶334下端面设有凹陷的限位槽3345(;垃圾桶334安装在第二从动齿轮333上且限位件335与限位槽卡合3345;垃圾桶334内壁成形有第一储存空间3341、第二储存空间3342、第三储存空间3343和第四储存空间3344;在第一储存空间3341、第二储存空间3342、第三储存空间3343和第四储存空间3344内都安装有第一第一传感器(图中未示出)。在本实施例中,第一储存空间3341对应可回收垃圾设置,第二储存空间3342对应有害垃圾设置,第三储存空间3343对应厨余垃圾设置,第四储存空间3344对应其它垃圾设置。
41.如图14、18、21、22所示;第一舵机模块32包括第一舵机321、拉伸装置322、连接件328和两个弹性件329;第一舵机321靠近底板311的一侧设置;拉伸装置322靠近底板311的另一侧设置;拉伸装置322包括拉伸件324和拉伸支座323;拉伸件324安装在拉伸支座323上;拉伸支座323靠近第一舵机的一端设有连接部326和两个复位部一327;连接部326位于两复位部一327之间;拉伸件324设有落料开口325;在第一舵机321上安装有舵盘3211;所述支撑支架312包括限位板314;限位板314设置在第一舵机321和拉伸装置322之间;限位板314与拉伸装置322垂直设置,限位板314设有限位通孔315;连接件328的一端与连接部326连接,连接件的另一端穿过限位通孔315与舵盘3211连接。当第一舵机321驱动舵盘3211转动时,连接件328饶设在舵盘3211上;连接件328带动拉伸装置322向第一舵机321靠近;通过设置限位通孔315;对拉伸装置的移动进行限位。
42.如图16
‑
18、21、22所示;承托支架313包括承托件一3131、承托件二3132、承托件三3133和承托盖板3134;承托件一3131、承托件二3132和承托件三3133都设有缺口;第一舵机模块32设置在缺口内;承托件二3132与承托件一3131连接且位于承托件一3131上方;承托件三3133与承托件二3132连接且位于承托件二3132上方;承托盖板3134与承托件三3133连接位于承托件三3133上方。
43.如图17
‑
18所示;承托件一3131向靠近第一舵机321方向凸设有支撑件一31311和支撑连杆31312;支撑件一位于支撑连杆31312内;支撑件一31311与支撑连杆31312成形有落料槽一31313;承托件一3131下端面安装有与第一传感器配合的第二传感器(图中未示出)。
44.如图17
‑
18所示;承托件二3132向靠近第一舵机321方向凸设有支撑件二31321和限位支件31322;限位支件31322设有两个;支撑件二31321位于两限位支件31322之间;支撑件二31321与支撑件一31311连接;限位支件31322与支撑连杆31312连接;在支撑件二31321上安装有ic卡感应模块31323;ic卡感应模块31323的上端面与限位支件31322的上端面平齐设置;限位支件31322远离第一舵机321的一端设有复位部二31324;复位部二31324设有两个;承托件三3133向远离第一舵机321方向凹陷有插入槽31331;ic卡感应模块31323的上端面与拉伸件324下端面贴合且活动连接。所述承托盖板3134设有入料开口31341;入料开口31341与插入槽31331和落料开口325连通。
45.如图17
‑
18所示;拉伸支座323活动设置在支撑连杆31312上,且拉伸支座323位于两限位支件31322之间;拉伸件324与插入槽31331配合;两弹性件329连接两复位部一327和两复位部二31324;落料开口325在ic卡感应模块31323和落料槽一31313之间往复移动。
46.如图2
‑
12所示;控制系统包括电源模块4、主控芯片5、电源电路6、降压电路7和语
音模块8;在本实施例中,主控芯片5型号为fk103m3。电源模块4与电源电路6连接,电源电路6与降压电路7连接,降压电路7的输出端与主控芯片5一电源端连接;按键模块1、ic卡感应模块31323、显示模块2、语音模块8、第一舵机模块32和第二舵机模块33分别连接在主控芯片5上;所述主控芯片5具有计时功能。
47.如图13、14所示;所述按键模块1包括第一按键11、第二按键12、第三按键13、第四按键14、第五按键15、第六按键16和第七按键17;第一按键11与主控芯片5的pb3端连接;第二按键12与主控芯片5的pe 3端连接;第三按键13与主控芯片5的pe2端连接;第四按键14与主控芯片5的pe1端连接;第五按键15与主控芯片5的pb9端连接;第六按键16与主控芯片5的pc3端连接;第七按键17与主控芯片5的pa4端连接。通过设置不同的按键与主控芯片5的不同连接端连接;这样通过不同按键实现不同的人机交互效果;进而互动效果好。
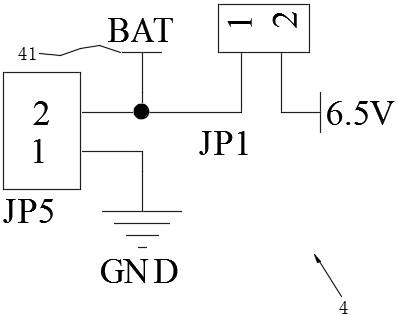
48.电源模块4包括电池41;电源模块4还包括接口jp1和接口jp5,接口jp1的1端和接口jp5的2端分别与电池41相连,接口jp1的2端为电源模块4的输出端,接口jp5的1端接地;本电路在两个接口连通时,输出6.5v电源。
49.电源电路6包括lm2596
‑
adj芯片61、电解电容e1、电解电容e2、发光二极管vd1、电容c1、电阻r1、电感l1和可调电阻rp1;电源模块的输出端与电源电路6的输入端相连;电池的输出端输出6.5v电压。
50.电源模块4的输出端还与lm2596
‑
adj芯片61的in端连接;lm2596
‑
adj芯片61的out端连接输出端;lm2596
‑
adj芯片61的gnd端接地;电解电容e1连接在lm2596
‑
adj芯片61的in端与gnd端之间;电阻r1连接在lm2596
‑
adj芯片61的fb端与gnd端;lm2596
‑
adj芯片61的out端与发光二极管vd1的输出端连接,发光二极管vd1的输入端与lm2596
‑
adj芯片61的gnd端连接;lm2596
‑
adj芯片61的out端依次连接电感l1的一端和电解电容e2的一端,电解电容e2的另一端接地;电感l1的另一端与可调电阻rp1的调节端连接;可调电阻rp1的一端与电阻r1的一端连接;电容c1的两端分别与可调电阻rp1的调节端以及一端相连;lm2596
‑
adj芯片的off端接地,lm2596
‑
adj芯片61的输出端输出5v电压,电源电路6的工作原理为:电源模块4给电源电路6的输入端提供6.5v电压,电解电容e1对输入电压进行滤波,防止输入域端干扰,经过lm2596
‑
adj芯片61进行降压之后out端输出5v电压,在out端接有电感l1和电容c1组成滤波电路,对输出端进行滤波,同时滑动电路rp1与电阻r1对输出进行电压反馈,使得lm2596
‑
adj芯片61正常工作,若lm2596
‑
adj芯片61正常工作时,二极管vd1亮,对lm2596
‑
adj芯片61工作情况进行提示。
51.降压电路7包括ams1117
‑
3v3芯片71、电容c2、电容c4、电容c7和电容c8;ams1117
‑
3v3芯片71的vin端连接lm2596
‑
adj芯片61的输出端;ams1117
‑
3v3芯片71的vout端连接输出端;ams1117
‑
3v3芯片71的gnd端接地;电容c4连接在ams1117
‑
3v3芯片71的vin端与gnd端;电容c7连接在电容的vout端与gnd端;ams1117
‑
3v3芯片71的vin端还连接电容c2,电容c2的输出端接地;ams1117
‑
3v3芯片71的vout端连接电容c8,电容c8的输出端接地;电容c8与vout端相连的一端为降压电路7的输出端,ams1117
‑
3v3芯片71的输出端输出3.3v电压;降压电路7的工作原理:电源电路6给降压电路7的输入端提供5v电压,经过电容c2和c4的滤波,ams1117
‑
3v3芯片71对输入电压进行降压以及稳压,输出3.3v电压,且在电容c7和电容c8的滤波作用下稳定输出。
52.主控芯片5的电源端与lm2596
‑
adj芯片61的输出端连接;主控芯片5的pa1端与第
一舵机模块32连接;第一舵机模块32的电源端与电源模块的输出端连接;第一舵机模块32的接地端接地。
53.主控芯片5的pa0端与第二舵机模块33连接;第二舵机模块33的电源端与电源模块的输出端连接;第二舵机模块33的接地端接地;主控芯片5的pc1端、pd14端、pc0端、pc2端和pd13端与显示模块2连接;显示模块2的电源端与ams1117
‑
3v3芯片71的输出端连接;显示模块2的接地端接地。
54.主控芯片5的pb1端、pc5端、pb2端、pa7端和pa6端与ic卡感应模块31323连接;ic卡感应模块31323的电源端与ams1117
‑
3v3芯片71的输出端连接;ic卡感应模块31323的接地端接地;主控芯片5的pd10端、pa2端和pa3端与语音模块8连接;语音模块8的电源端与lm2596
‑
adj芯片61的输出端连接;语音模块8的接地端接地。语音模块8的输出端还与喇叭81连接。
55.主控芯片5的pb3端、pe3端、pe2端、pe1端、pb9端、pc3端和pa4端与按键模块1连接;按键模块1的接地端接地。
56.分类装置通过按键模块1输入信号;通过显示模块2显示当前的分类结果;通过回收装置3实现对ic卡的回收;通过第二舵机驱动垃圾桶334转动;同时垃圾桶334内上有第一储存空间3341、第二储存空间3342、第三储存空间3343和第四储存空间3344;这样不同的ic卡回收到不同的储存空间内实现对垃圾分类的教学;同时拉伸装置322是活动设置在支撑连杆31312上;当第一舵机驱动拉伸装置322靠近第一舵机移动时;落料开口325会与落料槽一31313连通,同时因为ic卡感应模块31323的上端面与拉伸件324下端面贴合且活动连接;ic卡穿过落料开口325将放置在ic卡感应模块31323上;当拉伸装置322移动时会带动ic卡移动;进而ic卡从落料槽一31313掉落到垃圾桶334内;通过在复位部一327与复位部二31324之间连接弹性件329,在连接舵盘3211和连接部326之间连接连接件328,第一舵机动作时;是克服弹性件329的弹力带动拉伸装置322移动的,当第一舵机停止转动后;弹性件329回复初始状态,,在弹性件自身的弹力作用下带动拉伸装置322靠近插入槽且与插入槽贴合;这样方便控制。
57.控制系统通过电源模块的输出端输出6.5v电压为第一舵机模块32、第二舵机模块33和电源电路6供电;通过lm2596
‑
adj芯片61的的输出端输出5v电压为降压电路7、语音模块8和主控芯片5供电;通过ams1117
‑
3v3芯片71的输出端输出3.3v电压为显示模块2和ic感应模块供电。
58.控制系统还包括led模块;主控芯片5的pc6端、pd6端、pc7端、pd7端、pe4端、pe5端和pd15端与led模块连接;led模块的电源端与ams1117
‑
3v3芯片71的输出端连接;led模块的接地端接地。通过设置led模块,主控芯片5控制led模块进行led显示。
59.在第一舵机模块32的电源端与电源模块的输出端之间连接有电容c3。通过电容c3稳定电压电流让第一舵机模块32工作更稳定,电源模块以及主控芯片5与第一舵机32之间通过接口jp2相连,接口jp2的1端与电源模块的输出端相连,接口jp2的2端与主控芯片5的pa0相连,接口jp2的3端接地。
60.在第二舵机模块33的电源端与电源模块的输出端之间连接有电容c9。通过电容c9稳定电压电流让第二舵机模块33工作更稳定,电源模块以及主控芯片5与第二舵机模块33
之间通过接口jp12相连,接口jp12的1端与电源模块的输出端相连,接口jp12的2端与主控芯片5的pa1相连,接口jp12的3端接地。
61.在显示模块2的电源端与ams1117
‑
3v3芯片71的输出端之间连接有电容c6。通过电容c6稳定电压电流让显示模块2工作更稳定,电源模块以及主控芯片5与显示模块2之间通过接口jp6相连,接口jp6的1端接地,接口jp6的2端与ams1117
‑
3v3芯片71的输出端相连,接口jp6的3端与主控芯片5的pc1端相连,接口jp6的4端与主控芯片5的pa7端相连;接口jp6的5端与主控芯片5的pc0端相连; 接口jp6的6端与主控芯片5的pc2端相连; 接口jp6的9端与主控芯片5的pd13端相连。
62.在ic卡感应模块31323的电源端与ams1117
‑
3v3芯片71的输出端之间连接有电容c5。通过电容c5稳定电压电流让ic卡感应模块31323工作更稳定,ams1117
‑
3v3芯片71、主控芯片5与ic卡感应模块31323之间通过接口jp3相连,接口jp3的1端、2端、3端、4端以及7端分别与主控芯片5的pb1端、pc5端、pd14端、pa7端以及pa6端分别相连,接口jp3的6端接地,接口jp3的8端与ams1117
‑
3v3芯片71的输出端相连。
63.语音模块8与喇叭81、主控芯片5以及lm2596
‑
adj芯片61的输出端之间通过接口jp15相连,接口jp15的2端、3端和4端分别与主控芯片5的pd10端、pa2端和pa3端相连,接口jp15的5端接地,接口jp15的6端与lm2596
‑
adj芯片61输出端相连,接口jp15的7端和8端与喇叭81相连。
64.led模块与主控芯片5以及ams1117
‑
3v3芯片71的输出端之间通过接口jp7相连,接口jp7的1端、2端、3端、4端、5端和6端分别与主控芯片5的pc6端、pd6端、pc7端、pd7端、pe4端和pe5端相连;接口jp7的7端和8端分别与主控芯片5的pe6端和pd15端相连;接口jp7的9端与ams1117
‑
3v3芯片71的输出端相连。
65.通过多个接口实现模块电路与主控芯片以及电源模块之间的连接,方便多个模块之间连接,以及电路的布局,且本电路中通过电源电路进行降压以及稳压之后为ic感应模块供电,使得ic读取信号稳定性好,且电路结构简单。
66.本发明的工作方法,包括以下步骤:(1).预设第一计时时限和第二计时时限;第一计时时限结束后启动第一舵机;第二计时时限结束后启动第二舵机;在第一储存空间、第二储存空间、第三储存空间、第四储存空间内分别安装第一传感器;预设第一储存空间、第二储存空间、第三储存空间、第四储存空间的可储存垃圾回收种类数据;并分别与不同的第一第一传感器匹配;预设第四按键、第五按键、第六按键和第七按键的垃圾回收种类数据;(2).在不同的ic卡上预设物料名称;且将不同的ic卡分别与第一储存空间、第二储存空间、第三储存空间、第四储存空间的可存储的垃圾回收种类数据组合生成第一匹配数据保存;不同的ic卡分别对应第四按键、第五按键、第六按键和第七按键的垃圾回收种类数据生成第二匹配数据保存;本实施例中,垃圾回收种类数据包括可回收垃圾、有害垃圾、厨余垃圾以及其它垃圾,可回收垃圾包括纸等物料名称。
67.(3).若按下第一按键,主控芯片通过第一按键信号,则进行步骤(4);若按下第二按键,主控芯片通过第二按键信号,则进行步骤(9);(4).在落料开口放置ic卡;主控芯片得到脉冲信号; ic卡传感模块读取ic卡信息并生成读取数据发送至主控芯片;主控芯片输出脉冲信号到显示模块;显示模块对ic卡的
物料名称进行显示;主控芯片输出脉冲信号到第二传感器使得第二传感器工作;(5).第二传感器接收位于落料槽一下方的一第一传感器的信号并生成接收数据发送至主控芯片;(6).主控芯片将读取数据和接收数据进行分析;若分析结果与第一匹配数据符合则继步骤(7);若分析结果与第一匹配数据不符合则重复进行步骤(8);具体分析过程包括ic卡传感器读取ic卡信息,主控芯片读取ic卡上预设的物料名称;主控芯片根据物料名称确定对应的可储存垃圾回收种类数据;第二传感器接收第一传感器信号,主控芯片接收第一传感器的可存储的垃圾回收种类数据;确定的可储存垃圾回收种类数据与接收的可储存垃圾回收种类数据进行对比;若相同,则符合;若不相同,则不符合。在本实施例中,若一ic卡上预设物料名称为矿泉水瓶;第一储存空间内的第一传感器的可储存垃圾回收种类数据为可回收垃圾;第二储存空间内的第一传感器的可储存垃圾回收种类数据为有害垃圾;第一匹配数据中矿泉水瓶与可回收垃圾匹配;则第一储存空间的可储存垃圾回收种类数据和ic卡上预设物料名称与第一匹配数据符合。
68.(7).第一计时时限开始计时;第一计时时限计时结束后,主控芯片输出脉冲信号到第一舵机模块;第一舵机驱动拉伸件向靠近第一舵机方向移动;拉伸件与插入槽分离;弹性件被拉伸;落料开口与落料槽一连通;ic卡落入到垃圾桶内;然后第一舵机停止转动;弹性件在自身的弹力作用下复位;拉伸件与插入槽贴合;然后重复步骤(3);(8).第二计时时限开始计时;第二计时时限计时结束后,主控芯片输出脉冲信号到第二舵机模块;第二舵机驱动垃圾桶转动一定角度;然后主控芯片再次输出脉冲信号到第二舵机模块;第二舵机停止;然后继续进行步骤(5);(9).在落料开口放置ic卡;主控芯片得到脉冲信号; ic卡传感模块读取ic卡信息并生成读取数据发送至主控芯片;主控芯片输出脉冲信号到显示模块;显示模块对ic卡的物料名称进行显示;(10).按下第四按键、第五按键、第六按键或第七按键生成输入数据发送至主控芯片;(11).主控芯片将输入数据和读取数据与第二匹配数据进行分析;并将分析结果输出到语音模块和led模块;具体的分析过程包括:主控芯片读取步骤(10)中按键信息对应的垃圾回收品种数据,然后与ic卡中物料名称对应的垃圾回收品种数据进行对比,得到分析结果;本实施例中,若ic卡中物料名称为废纸,第四按键对应垃圾回收品种数据为可回收垃圾,第五按键对应垃圾回收品种数据为有害垃圾;第二匹配数据中废纸与可回收垃圾匹配;则第四按键对应垃圾回收品种数据和ic卡上预设物料名称与第二匹配数据符合。若按下第四按键,输入数据和接收数据与第二匹配数据符合,主控芯片通过语音模块播放正确提示,且led模块进行显示;若按下第五按键,输入数据和接收数据与第二匹配数据不符合,主控芯片通过语音模块播放错误提示,且led模块进行显示。
69.(12).主控芯片输出脉冲信号到第二传感器;第二传感器接收位于落料槽一下方的一第一传感器的信号并生成接收数据发送至主控芯片;然后进行步骤(6)。
70.以上方法,通过第一按键或第二按键输出不同的脉冲信号;当主控芯片接收到第一按键的脉冲信号,且ic卡传感模块读取到ic卡信息后;主控芯片先将读取数据和接收数
据进行分析;这样若分析结果与第一匹配数据符合,则不需要驱动第二舵机转动;若分析结果与第一匹配数据不符合,第二计时时限结束,驱动第二舵机转动;这样在第二舵机转动前具有一定的等待时间,方便使用者进行观察,提高使用提高;当分析结果与第一匹配数据符合,第一计时时限结束,驱动第一舵机转动;避免若当第二舵机不需转动时,ic卡落入到垃圾桶的时间短,而导致影响使用者的体验;这样与使用者之间的互动效果好;当主控芯片接收到第二按键的脉冲信号,ic卡传感模块读取到ic卡信息,且通过生成输入数据后;主控芯片将数据和接收数据与第二匹配数据进行分析;这样能判断出使用者选择的垃圾回收种类与ic卡的物料名称是否对应。
71.上述方法中:步骤(1)中,第一计时时限为5s;第二计时时限为5s。
72.步骤(11)中,若输入数据和接收数据与第二匹配数据符合,则led模块发出绿灯;若输入数据和接收数据与第二匹配数据不符合,则led模块发出红灯。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1