一种滑翔伞运动专业训练装置的制作方法
[0001]
本实用新型涉及滑翔伞飞行员专业训练技术领域,具体为一种滑翔伞运动专业训练装置。
背景技术:
[0002]
滑翔伞是一种柔性翼悬挂滑翔飞行器,在空气的作用下,滑翔伞能载人升空进行滑翔飞行。由于滑翔伞运动是一种专业性强的体育运动,其对场地的要求以及对天气状况的要求都很严格的。因此,对其发展起到了一定的限制作用。同时,因为没有更专业的滑翔伞运动专业训练装置,从而影响了滑翔伞飞行员专业训练。
[0003]
申请号为201610866306的专利介绍了一种滑翔伞飞行vr模拟器,该专利通过四个驱动电机带动四个操纵绳的不同幅度伸缩,来实现滑翔伞坐袋在空间的姿态变化,但是该专利只能实现上下、俯仰和左右摆动动作。
[0004]
申请号为2016101841484的专利介绍了3d滑翔伞体验器,该专利利用三个电机带动滚柱丝杠旋转,来使坐垫上的体验者上下运动体验滑翔过程,但是该专利只能实现坐垫的上下、俯仰和左右摆动动作。
[0005]
上述专利动作姿态变化花样少,动作幅度小,只能针对于简单的滑翔伞娱乐性体验活动,不能真实地表现出滑翔伞在空中飞行的实际姿态,所以不能满足滑翔伞飞行员专业训练。
技术实现要素:
[0006]
(一)解决的技术问题
[0007]
针对现有技术的不足,本实用新型提供了一种滑翔伞运动专业训练装置,解决了现有的动作姿态变化花样少,动作幅度小,只能针对于简单的滑翔伞娱乐性体验活动的问题。
[0008]
(二)技术方案
[0009]
为实现上述目的,本实用新型提供如下技术方案:一种滑翔伞运动专业训练装置,包括外框支架,所述外框支架中间位置安装空心旋转轴,所述空心旋转轴的下端固定安装旋转盘,所述空心旋转轴的上端固定安装导电滑环;所述旋转盘中部安装有第2减速电机,所述第2减速电机驱动链条控制旋转盘旋转,所述旋转盘的底部圆周方向上,间隔120
°
均匀布置着第1电机支架、第2电机支架和第3电机支架,所述第1电机支架、所述第2电机支架和所述第3电机支架上分别安装有第1减速电机、第3减速电机和第4减速电机,所述第1减速电机、所述第3减速电机和所述第4减速电机的输出轴上安装有第1线轮、第2线轮和第3线轮,所述第1线轮、所述第2线轮和所述第3 线轮分别与左钢丝绳、右钢丝绳和后钢丝绳的一端连接,所述左钢丝绳的另一端和所述右钢丝绳的另一端分别与左拉力传感器的一端和右拉力传感器的一端连接,所述左拉力传感器的另一端和所述右拉力传感器的另一端分别与座袋的左侧挂钩和右侧挂钩连接,所述后钢丝绳的另一端与座袋的后侧挂钩连接;所述左钢
丝绳和所述右钢丝绳上分别固定有左拉线位移传感器和右拉线位移传感器;所述左拉线位移传感器的拉线和所述右拉线位移传感器的拉线分别与左操纵线把手和右操纵线把手连接;所述旋转盘的底部设置有嵌入式主控制系统,所述嵌入式主控制系统包括arm单片机、第1无线通信模块、电机驱动器、第1减速电机输出端、第2减速电机输出端、第3减速电机输出端和第4减速电机输出端,其中:arm单片机内的串口接口与第1无线通信模块电性连接,arm单片机内部的定时器1脉冲接口、定时器2脉冲接口、定时器3脉冲接口和定时器4脉冲接口通过电机驱动器分别与第1减速电机输出端、第2减速电机输出端、第3减速电机输出端和第4减速电机输出端电性连接,第1减速电机输出端、第2减速电机输出端、第3减速电机输出端和第4减速电机输出端分别与第1减速电机、第2减速电机、第3减速电机和第4减速电机电性连接;所述座袋底部中间位置设置有嵌入式副控制系统,所述嵌入式副控制系统包括51单片机、左拉力传感器输入端、右拉力传感器输入端、左拉线位移传感器输入端、右拉线位移传感器输入端和第2无线通信模块,其中:左拉力传感器和右拉力传感器分别与左拉力传感器输入端和右拉力传感器输入端电性连接,左拉力传感器输入端和右拉力传感器输入端分别与51单片机内的ad1接口和ad2接口电性连接,左拉线位移传感器和右拉线位移传感器分别与左拉线位移传感器输入端和右拉线位移传感器输入端电性连接,左拉线位移传感器输入端和右拉线位移传感器输入端分别与51单片机内的计数器1接口和计数器2接口电性连接,第2无线通信模块与51单片机内的串口接口电性连接;所述第1无线通信模块与所述第2无线通信模块无线连接。
[0010]
优选的,所述外框支架为立方体,其边长范围为3m-10m;外框支架的边长为3m时适合室内训练和真实体验飞行,外框支架的边长为5m时适合普通飞行营地训练,外框支架的边长为10m时适合国家队训练。
[0011]
优选的,所述旋转盘的直径范围2m-9m,且旋转盘的直径越大,飞行动作的前后左右平移效果越好。
[0012]
优选的,所述导电滑环采用3路圆柱式集成导电滑环,用于给嵌入式主控制系统供电,安装导电滑环使得旋转盘不受旋转圈数的限制。
[0013]
优选的,所述左拉线位移传感器和所述右拉线位移传感器采用2000mm量程的增量型脉冲输出旋转编码器,分别用于测量左操纵线把手和右操纵线把手的拉绳伸出量。
[0014]
优选的,所述左拉力传感器和所述右拉力传感器采用s型150kg量程0-5v 输出的拉力传感器,分别用于测量左钢丝绳和右钢丝绳的拉力,从而检测飞行员压座袋左右重心。
[0015]
优选的,所述第1无线通信模块和所述第2无线通信模块采用hc05蓝牙模块,第1无线通信模块和第2无线通信模块用于嵌入式主控制系统与嵌入式副控制系统之间的通信。
[0016]
优选的,所述arm单片机采用基于cortex-m4内核的stm32f407单片机,该单片机集成了浮点运算单元和增强的dsp处理指令,可达到210dmips的处理能力;所述51单片机采用基于高速8051微控制器内核的c8051f380单片机,该单片机集成了10位逐次逼近型500ksps的adc。
[0017]
(三)有益效果
[0018]
本实用新型提供了一种滑翔伞运动专业训练装置,具备以下有益效果:
[0019]
该滑翔伞运动专业训练装置动作姿态变化花样多,动作幅度大,能够真实地表现出滑翔伞在空中飞行的实际姿态,满足了滑翔伞飞行员专业训练。
附图说明
[0020]
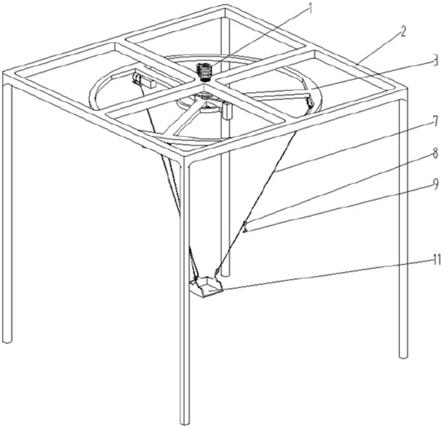
图1为滑翔伞运动专业训练装置结构示意图;
[0021]
图2为滑翔伞运动专业训练装置结构主视图;
[0022]
图3为滑翔伞运动专业训练装置结构主视图中a处的局部放大图;
[0023]
图4为滑翔伞运动专业训练装置结构左视图;
[0024]
图5为滑翔伞运动专业训练装置嵌入式副控制系统框图;
[0025]
图6为滑翔伞运动专业训练装置嵌入式主控制系统框图。
[0026]
图中:1-导电滑环;2-外框支架;3-旋转盘;4-第1电机支架;5-第1 减速电机;6-第1线轮;7-左钢丝绳;8-左拉线位移传感器;9-左操纵线把手;10-左拉力传感器;11-座袋;12-嵌入式副控制系统;13-链条;14-第2 减速电机;15-第2电机支架;16-第3减速电机;17-第2线轮;18-右钢丝绳;19-后钢丝绳;20-右拉线位移传感器;21-右操纵线把手;22-右拉力传感器;23-第3线轮;24-第3电机支架;25-第4减速电机;26-嵌入式主控制系统;27-空心旋转轴;120-51单片机;121-串口接口;122-第2无线通信模块;123-计数器1接口;124-计数器2接口;125-右拉线位移传感器输入端;126-左拉线位移传感器输入端;127-右拉力传感器输入端;128-左拉力传感器输入端;129-ad1接口;130-ad2接口;260-arm单片机;261-定时器 2脉冲接口;262-定时器1脉冲接口;263-电机驱动器;264-减速电机1输出端;265-减速电机2输出端;266-减速电机3输出端;267-减速电机4输出端;268-定时器4脉冲接口;269-定时器3脉冲接口;270-第1无线通信模块;271-串口接口。
具体实施方式
[0027]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0028]
如图1-6所示,一种滑翔伞运动专业训练装置,包括外框支架2,所述外框支架2中间位置安装空心旋转轴27,所述空心旋转轴27的下端固定安装旋转盘3,所述空心旋转轴27的上端固定安装导电滑环1;所述旋转盘3中部安装有第2减速电机14,所述第2减速电机14驱动链条13控制旋转盘3旋转,所述旋转盘3的底部圆周方向上,间隔120
°
均匀布置着第1电机支架4、第2电机支架15和第3电机支架24,所述第1电机支架4、所述第2电机支架15和所述第3电机支架24上分别安装有第1减速电机5、第3减速电机 16和第4减速电机25,所述第1减速电机5、所述第3减速电机16和所述第 4减速电机25的输出轴上安装有第1线轮6、第2线轮17和第3线轮23,所述第1线轮6、所述第2线轮17和所述第3线轮23分别与左钢丝绳7、右钢丝绳18和后钢丝绳19的一端连接,所述左钢丝绳7的另一端和所述右钢丝绳18的另一端分别与左拉力传感器10的一端和右拉力传感器22的一端连接,所述左拉力传感器10的另一端和所述右拉力传感器22的另一端分别与座袋11的左侧挂钩和右侧挂钩连接,所述后钢丝绳19的另一端与座袋11的后侧挂钩连接;所述左钢丝绳7和所述右钢丝绳18上分别固定有左拉线位移传感器8和右拉线位移传感器20;所述左拉线位移传感器8的拉线和所述右拉线位移传感器20的拉线分别与左操纵线把手9和右操纵线把手21连接;所述旋转盘3的底部设置有嵌入式主控制系统26,所述嵌入式主控制系统26包括 arm单片机260、第1无线通信模块
270、电机驱动器263、第1减速电机输出端264、第2减速电机输出端265、第3减速电机输出端266和第4减速电机输出端267,其中:arm单片机260内的串口接口271与第1无线通信模块 270电性连接,arm单片机260内部的定时器1脉冲接口262、定时器2脉冲接口261、定时器3脉冲接口269和定时器4脉冲接口268通过电机驱动器 263分别与第1减速电机输出端264、第2减速电机输出端265、第3减速电机输出端266和第4减速电机输出端267电性连接,第1减速电机输出端264、第2减速电机输出端265、第3减速电机输出端266和第4减速电机输出端 267分别与第1减速电机5、第2减速电机14、第3减速电机16和第4减速电机25电性连接;所述座袋11底部中间位置设置有嵌入式副控制系统12,所述嵌入式副控制系统12包括51单片机120、左拉力传感器输入端128、右拉力传感器输入端127、左拉线位移传感器输入端126、右拉线位移传感器输入端125和第2无线通信模块122,其中:左拉力传感器10和右拉力传感器 22分别与左拉力传感器输入端128和右拉力传感器输入端127电性连接,左拉力传感器输入端128和右拉力传感器输入端127分别与51单片机120内的 ad1接口129和ad2接口130电性连接,左拉线位移传感器8和右拉线位移传感器20分别与左拉线位移传感器输入端126和右拉线位移传感器输入端125 电性连接,左拉线位移传感器输入端126和右拉线位移传感器输入端125分别与51单片机120内的计数器1接口123和计数器2接口124电性连接,第 2无线通信模块122与51单片机120内的串口接口121电性连接;所述第1 无线通信模块270与所述第2无线通信模块122无线连接。
[0029]
优选的,所述外框支架2为立方体,其边长范围为3m-10m;外框支架2 的边长为3m时适合室内训练和真实体验飞行,外框支架2的边长为5m时适合普通飞行营地训练,外框支架2的边长为10m时适合国家队训练。
[0030]
优选的,所述旋转盘3的直径范围2m-9m,且旋转盘1的直径越大,飞行动作的前后左右平移效果越好。
[0031]
优选的,所述导电滑环1采用3路圆柱式集成导电滑环,用于给嵌入式主控制系统26供电,安装导电滑环1使得旋转盘3不受旋转圈数的限制。
[0032]
优选的,所述左拉线位移传感器8和所述右拉线位移传感器20采用 2000mm量程的增量型脉冲输出旋转编码器,分别用于测量左操纵线把手9和右操纵线把手21的拉绳伸出量。
[0033]
优选的,所述左拉力传感器10和所述右拉力传感器22采用s型150kg 量程0-5v输出的拉力传感器,分别用于测量左钢丝绳7和右钢丝绳18的拉力,从而检测飞行员压座袋11左右重心。
[0034]
优选的,所述第1无线通信模块270和所述第2无线通信模块122采用 hc05蓝牙模块,第1无线通信模块270和第2无线通信模块122用于嵌入式主控制系统26与嵌入式副控制系统12之间的通信。
[0035]
优选的,所述arm单片机260采用基于cortex-m4内核的stm32f407单片机,该单片机集成了浮点运算单元和增强的dsp处理指令,可达到210dmips 的处理能力;所述51单片机120采用基于高速8051微控制器内核的c8051f380 单片机,该单片机集成了10位逐次逼近型500ksps的adc。
[0036]
本滑翔伞运动专业训练装置的工作原理为:飞行员拉动左操纵线把手9 和右操纵线把手21,左拉线位移传感器8和右拉线位移传感器20的拉绳伸出量发生变化,左拉线位移
传感器8和右拉线位移传感器20内部的旋转编码器旋转,左拉线位移传感器8和右拉线位移传感器20输出增量型脉冲信号,51 单片机120通过内部计数器1和计数器2计数的计数器1接口123和计数器2 接口124的增量型脉冲信号来衡量左操纵线把手9和右操纵线把手21的拉绳伸出量;飞行员压座袋11左右重心,左拉力传感器10和右拉力传感器22承受的拉力变化,左拉力传感器10和右拉力传感器22输出表示拉力的电压信号变化,51单片机120通过内部adc测量的ad1接口129和ad2接口130 的电压信号来衡量左拉力传感器10和右拉力传感器22承受的拉力变化,从而测量出飞行员压座袋11左右重心。51单片机120将飞行员拉动左操纵线把手9和右操纵线把手21的拉绳伸出量及飞行员压座袋11左右重心数据通过第2无线通信模块122和第1无线通信模块270发送给arm单片机260, arm单片机260根据飞行员拉动左操纵线把手9和右操纵线把手21的拉绳伸出量、飞行员压座袋11左右重心和当前座袋11的运动状态计算出座袋11 下一时刻的运动轨迹,arm单片机260再根据计算出的下一时刻座袋11的运动轨迹计算出左钢丝绳7、右钢丝绳18和后钢丝绳19的拉绳伸出量及旋转盘3角度,arm单片机260再根据计算出的左钢丝绳7、右钢丝绳18和后钢丝绳19的拉绳伸出量及旋转盘3角度计算出第1减速电机5、第2减速电机 14、第3减速电机16和第4减速电机25的旋转量,arm单片机260再根据计算出的第1减速电机5、第2减速电机14、第3减速电机16和第4减速电机25的旋转量计算出定时器1、定时器2、定时器3和定时器4的脉冲数量和频率,arm单片机260再根据计算出的定时器1、定时器2、定时器3和定时器4的脉冲数量和频率控制定时器1、定时器2、定时器3和定时器4输出对应数量和频率的脉冲信号给定时器1接口262、定时器2接口261、定时器3接口269和定时器4接口268,电机驱动器263通过接收到定时器1接口 262、定时器2接口261、定时器3接口269和定时器4接口268的脉冲信号分别控制第1减速电机5、第2减速电机14、第3减速电机16和第4减速电机25旋转,第1减速电机5、第2减速电机14、第3减速电机16和第4减速电机25旋转通过第1线轮6、第2线轮17、第3线轮23和链条13分别使左钢丝绳7、右钢丝绳18和后钢丝绳19的拉绳伸出量和旋转盘3的旋转,左钢丝绳7、右钢丝绳18和后钢丝绳19的拉绳伸出量和旋转盘3的旋转联合控制座袋11空间位置和角度,达到飞行员通过拉动左操纵线把手9和右操纵线把手21以及压重心来控制座袋运动轨迹的目的。
[0037]
各个运动姿态的实现:
[0038]
1、上升运动姿态的实现:第1减速电机5、第3减速电机16和第4减速电机25同步正转,第1减速电机5、第3减速电机16和第4减速电机25分别驱动第1线轮6、第2线轮17和第3线轮23使左钢丝绳7、右钢丝绳18 和后钢丝绳19的拉绳伸出量同步减小,左钢丝绳7、右钢丝绳18和后钢丝绳 19联合控制座袋11向上运动,从而模拟出真实的上升运动姿态。
[0039]
2、下降运动姿态的实现:第1减速电机5、第3减速电机16和第4减速电机25同步反转,第1减速电机5、第3减速电机16和第4减速电机25分别驱动第1线轮6、第2线轮17和第3线轮23使左钢丝绳7、右钢丝绳18 和后钢丝绳19的拉绳伸出量同步增大,左钢丝绳7、右钢丝绳18和后钢丝绳 19联合控制座袋11向下运动,从而模拟出真实的下降运动姿态。
[0040]
3、左摆运动姿态的实现:第4减速电机25不转,第1减速电机5正转,第3减速电机16反转,且第1减速电机5的速率与第3减速电机16的速率相等,第1减速电机5、第3减速电机16和第4减速电机25分别驱动第1线轮6、第2线轮17和第3线轮23使左钢丝绳7拉绳伸出量增大、右钢丝绳 18拉绳伸出量减小和后钢丝绳19拉绳伸出量不变,且左钢丝绳7拉绳伸出量
增大值等于右钢丝绳18拉绳伸出量减小值,左钢丝绳7、右钢丝绳18和后钢丝绳19联合控制座袋11向左移动同时向右下侧倾斜,完成左摆动作,从而模拟出真实的左摆运动姿态。
[0041]
4、右摆运动姿态的实现:第4减速电机25不转,第1减速电机5反转,第3减速电机16正转,且第1减速电机5的速率与第3减速电机16的速率相等,第1减速电机5、第3减速电机16和第4减速电机25分别驱动第1线轮6、第2线轮17和第3线轮23使左钢丝绳7拉绳伸出量减小、右钢丝绳 18拉绳伸出量增大和后钢丝绳19拉绳伸出量不变,且左钢丝绳7拉绳伸出量减小值等于右钢丝绳18拉绳伸出量增大值,左钢丝绳7、右钢丝绳18和后钢丝绳19联合控制座袋11向右移动同时向左下侧倾斜,完成右摆动作,从而模拟出真实的右摆运动姿态。
[0042]
5、左转弯运动姿态的实现:第2减速电机14通过驱动链条13使旋转盘3 向左转动,旋转盘通过左钢丝绳7、右钢丝绳18和后钢丝绳19使座袋11向左转动;由于转弯时座袋11要丢高度,第1减速电机5、第3减速电机16和第4减速电机25反转,并且第1减速电机5的速率大于第3减速电机16速率,第4减速电机25的速率等于第1减速电机5和第3减速电机16的平均值,第1减速电机5、第3减速电机16和第4减速电机25分别驱动第1线轮 6、第2线轮17和第3线轮23使左钢丝绳7拉绳伸出量增大值大于右钢丝绳 18拉绳伸出量增大值、后钢丝绳19拉绳伸出量增大值等于左钢丝绳7拉绳伸出量增大值和右钢丝绳18拉绳伸出量增大值的平均值,左钢丝绳7、右钢丝绳18和后钢丝绳19联合控制座袋11向下运动的同时向外框支架2中心侧倾斜,由于座袋11旋转和向下运动的同时向外框支架2中心侧倾斜,座袋11 被甩离中心,从而模拟出真实的左转弯运动姿态。
[0043]
6、右转弯运动姿态的实现:第2减速电机14通过驱动链条13使旋转盘3 向右转动,旋转盘通过左钢丝绳7、右钢丝绳18和后钢丝绳19使座袋11向右转动;由于转弯时座袋11要丢高度,第1减速电机5、第3减速电机16和第4减速电机25反转,并且第1减速电机5的速率小于第3减速电机16速率,第4减速电机25的速率等于第1减速电机5和第3减速电机16的平均值,第1减速电机5、第3减速电机16和第4减速电机25分别驱动第1线轮6、第2线轮17和第3线轮23使左钢丝绳7拉绳伸出量增大值小于右钢丝绳 18拉绳伸出量增大值、后钢丝绳19拉绳伸出量增大值等于左钢丝绳7拉绳伸出量增大值和右钢丝绳18拉绳伸出量增大值的平均值,左钢丝绳7、右钢丝绳18和后钢丝绳19联合控制座袋11向下运动的同时向外框支架2中心侧倾斜,由于座袋11旋转和向下运动的同时向外框支架2中心侧倾斜,座袋11 被甩离中心,从而模拟出真实的右转弯运动姿态。
[0044]
7、俯冲运动姿态的实现:第1减速电机5、第3减速电机16和第4减速电机25反转,第4减速电机25的速率小于第1减速电机5的速率,第1减速电机5的速率等于第3减速电机16的速率,第1减速电机5、第3减速电机 16和第4减速电机25分别驱动第1线轮6、第2线轮17和第3线轮23使后钢丝绳19的拉绳伸出量增大值小于左钢丝绳7的拉绳伸出量增大值、左钢丝绳7和右钢丝绳18的拉绳伸出量增大值相等,左钢丝绳7、右钢丝绳18和后钢丝绳19联合控制座袋11向前运动的同时向下运动,完成俯冲运动,从而模拟出真实的俯冲运动姿态。
[0045]
8、仰冲运动姿态的实现:第1减速电机5、第3减速电机16和第4减速电机25正转,第4减速电机25的速率小于第1减速电机5的速率,第1减速电机5的速率等于第3减速电机16的速率,第1减速电机5、第3减速电机 16和第4减速电机25分别驱动第1线轮6、第2线轮17和第3线轮23使后钢丝绳19的拉绳伸出量减小值大于左钢丝绳7的拉绳伸出量减小值、左钢丝绳7和右钢丝绳18的拉绳伸出量减小值相等,左钢丝绳7、右钢丝绳18和后钢丝绳19联合控制
座袋11向后运动同时向上运动,完成仰冲运动,从而模拟出真实的仰冲运动姿态。
[0046]
综上可得,本实用新型能够真实地表现出滑翔伞在空中的上升运动、下降运动、左摆运动、右摆运动、左转弯运动、右转弯运动、俯冲运动、仰冲运动,能够体现出在空中飞行的实际姿态;同时通过设置外框支架、旋转盘、第1减速电机、第2减速电机、第3减速电机、第3减速电机、左钢丝绳、右钢丝绳、后钢丝绳,使得飞行动作的幅度大,也便于调节。
[0047]
需要说明的是,在本文中,诸如第1、第2、第3、第4、左、右、后等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0048]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1