一种玩具动物的制作方法
1.本实用新型涉及玩具,具体涉及一种玩具动物。
背景技术:
2.现有的玩具动物(即具有动物造型的动物)大多能够模仿动物行走、头部摆动等动作,但其躯体外壳大多是一体的或固定不变的,缺少变化,其功能、动作较为单一,娱乐性和可玩性不强。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种玩具动物,这种玩具动物能够模仿动物躯体蜷曲、伸展的动作,娱乐性和可玩性较强。采用的技术方案如下:
4.一种玩具动物,包括外壳和机芯箱体,外壳包覆在机芯箱体外面,其特征在于:所述外壳包括有至少两个活动壳体,机芯箱体中设有能够驱动各活动壳体分别绕其转动轴线转动的蜷曲伸展机构,各活动壳体的转动轴线均为左右走向。
5.优选方案中,上述外壳包括一个固定壳体和两个活动壳体,两个活动壳体分别为前活动壳体和后活动壳体,固定壳体与机芯箱体固定连接,前活动壳体处于固定壳体的前侧,后活动壳体处于固定壳体的后侧;前活动壳体通过前转轴与固定壳体前端或机芯箱体可转动连接,前转轴的轴线为左右走向;后活动壳体通过后转轴与固定壳体后端或机芯箱体可转动连接,后转轴的轴线为左右走向;蜷曲伸展机构能够驱动前活动壳体绕前转轴转动并驱动后活动壳体绕后转轴转动。通常,在蜷曲伸展机构驱动下,前活动壳体和后活动壳体相向转动或相背转动。当两个活动壳体相向转动时(前活动壳体的前端向后摆动,同时后活动壳体的后端向前摆动),两个活动壳体同时向机芯箱体靠拢,模仿动物躯体蜷曲动作。当两个活动壳体相背转动时(前活动壳体的前端向前摆动,同时后活动壳体的后端向后摆动),两个活动壳体同时远离机芯箱体,模仿动物躯体伸展动作。
6.一种具体方案中,上述固定壳体处在机芯箱体的上方并与机芯箱体顶部固定连接,前活动壳体处在机芯箱体的前方,前活动壳体后端的上边沿通过前转轴与固定壳体前端或机芯箱体顶部的前端可转动连接,后活动壳体前端的上边沿通过后转轴与固定壳体后端或机芯箱体顶部的后端可转动连接。前转轴可由轴线相重合的两个前轴头组成,两个前轴头左右并排;后转轴可由轴线相重合的两个后轴头组成,两个后轴头左右并排。
7.更优选方案中,上述蜷曲伸展机构包括内箱体、第一电动机、横向驱动轴、驱动盘、升降滑板、前连杆机构和后连杆机构;内箱体、横向驱动轴、驱动盘和升降滑板均处在机芯箱体中;第一电动机安装在内箱体中,横向驱动轴可转动安装在内箱体上,横向驱动轴的轴线为左右走向,第一电动机的动力输出轴与横向驱动轴传动连接并且能够驱动横向驱动轴转动;驱动盘固定安装在横向驱动轴上,驱动盘上偏离横向驱动轴轴线的位置设有驱动插柱,升降滑板安装在内箱体外侧并且可相对于内箱体上下移动,升降滑板上设有前后走向的条形插孔,驱动插柱处在条形插孔中;升降滑板上设有前动力输出轴和后动力输出轴,前
动力输出轴和后动力输出轴的轴线均为左右走向;机芯箱体上设有上下走向的前条形导引孔和上下走向的后条形导引孔,前动力输出轴处在前条形导引孔中,后动力输出轴处在后条形导引孔中;前连杆机构包括前摆臂,前摆臂的第一端与前动力输出轴可转动连接,前摆臂的第二端与前活动壳体铰接;后连杆机构包括后摆臂和第一后连杆,后摆臂的第一端上设有沿后摆臂长度方向延伸的第一条形套孔,后动力输出轴处在第一条形套孔中,后摆臂的第二端与机芯箱体可转动连接,后摆臂的第二端与第一后连杆的第一端连接,第一后连杆的第二端上设有第一后插销,后活动壳体上设有条形的第一后插销插孔(第一后插销插孔大致为上下走向),第一后插销处在第一后插销插孔中。可在前摆臂的第一端上设有圆形套孔,前动力输出轴处在该圆形套孔中。通常前摆臂的第一端为上端、第二端为下端,前摆臂第二端与前活动壳体的铰接处位置低于前转轴。通常,后摆臂与第一后连杆之间具有一夹角,两者连接后呈v形。后摆臂的第二端可与第一后连杆的第一端一体连接。机芯箱体可设有左右走向的第一销轴,后摆臂的第二端上设有第一销孔,第一销轴处在第一销孔中,使后摆臂和第一后连杆能够绕第一销轴转动。通常,第一条形套孔大致为前后走向,后摆臂的第一端为前端、第二端为后端。升降滑板可安装在内箱体的左侧或右侧。
8.更进一步的优选方案中,上述后连杆机构还包括第二后连杆、第三后连杆和第四后连杆,第二后连杆的第一端与后摆臂连接,第二后连杆的第二端上设有第二后插销,第三后连杆的第一端上设有条形的第二后插销插孔,第二后插销插孔沿第三后连杆的长度方向延伸,第二后插销处在第二后插销插孔中,第三后连杆的第二端与机芯箱体可转动连接,第四后连杆的第一端与第三后连杆的第二端连接,第四后连杆的第二端上设有第三后插销,后活动壳体上设有条形的第三后插销插孔(第三后插销插孔大致为上下走向),第三后插销处在第三后插销插孔中。第一后插销插孔、第三后插销插孔设于后活动壳体的不同部位,这种情况下,后活动壳体可分为两部分,这两部分之间可小幅度相对转动,第一后插销插孔、第三后插销插孔分别设在这两部分上。机芯箱体可设有左右走向的第二销轴,第三后连杆的第二端上设有第二销孔,第二销轴处在第二销孔中,使第三后连杆和第四后连杆能够绕第二销轴转动。第四后连杆的第一端可与第三后连杆的第二端一体连接。
9.其他实施方案中,前活动壳体也可以采用与后连杆机构类似的机构驱动,后活动壳体也可以采用与前连杆机构类似的机构驱动。
10.上述驱动插柱、前动力输出轴、后动力输出轴通常为圆柱状。
11.一种具体方案中,为了使升降滑板能够平稳升降,上述内箱体的侧壁上设有多个定位导引块(定位导引块设于内箱体的左侧壁或右侧壁上),升降滑板上设有多个上下走向的条形定位导引孔,条形定位导引孔与定位导引块数量相同且一一对应,定位导引块处于对应的条形定位导引孔中。可在定位导引块上设有螺孔,螺孔中安装螺钉,螺钉头部的外径大于对应的条形定位导引孔的宽度,升降滑板处于各螺钉头部与内箱体的侧壁之间。
12.为了使两个活动壳体转动时受力均衡,上述驱动盘、升降滑板、前连杆机构和后连杆机构都设有两个,并且左右对称(分别设于内箱体的左右两侧)。第一电动机的动力输出轴驱动横向驱动轴转动时,两个驱动盘同时随着转动,通过两个升降滑板带动两个前连杆机构同步动作,两个后连杆机构也同步动作。
13.优选方案中,上述玩具动物还包括翻筋斗机构,翻筋斗机构包括翻筋斗摆杆、翻筋斗摆杆传动齿轮和翻筋斗摆杆定位轴,翻筋斗摆杆定位轴可转动安装在机芯箱体底部,翻
筋斗摆杆定位轴的轴线为左右走向,翻筋斗摆杆传动齿轮固定安装在翻筋斗摆杆定位轴上,翻筋斗摆杆传动齿轮与一电动机的动力输出轴传动连接;翻筋斗摆杆处在机芯箱体下侧,翻筋斗摆杆的前端或后端与翻筋斗摆杆定位轴连接。翻筋斗摆杆定位轴上可套接一扭力弹簧,扭力弹簧的两个扭力臂分别与机芯箱体底部、翻筋斗摆杆连接或接触,扭力弹簧对翻筋斗摆杆施加作用力,使翻筋斗摆杆具有朝向机芯箱体底部摆动的趋势,用于使翻筋斗摆杆能够自动复位。电动机驱动翻筋斗摆杆的自由端绕翻筋斗摆杆定位轴向下摆动时,将机芯箱体的后端或前端抬高,使玩具动物的前端或后端接触到地面,形成支撑点,当整个玩具动物的重心越过支撑点时,玩具动物向前或向后翻滚,实现玩具动物的翻筋斗动作。
14.上述与翻筋斗摆杆传动齿轮传动连接的电动机可为第一电动机,也可以为另外单独设置的电动机。
15.更优选方案中,上述驱动盘的圆周面上设有弧形齿条(弧形齿条约占驱动盘的圆周面的1/4至1/3),弧形齿条能够与翻筋斗摆杆传动齿轮啮合。这种情况下,采用上述第一电动机作为翻筋斗动作的动力源,可简化结构。驱动盘转动的过程中,当转动至弧形齿条与翻筋斗摆杆传动齿轮啮合的位置时,可驱动翻筋斗摆杆传动齿轮转动,此时翻筋斗摆杆摆动;当弧形齿条末端越过翻筋斗摆杆传动齿轮时,驱动盘的圆周面上平滑的部分与翻筋斗摆杆传动齿轮对应,此时驱动盘无法带动翻筋斗摆杆传动齿轮转动,翻筋斗摆杆可在扭力弹簧的作用下复位。
16.一种具体方案中,上述外壳可为刺猬形状,在蜷曲伸展机构的驱动下模仿刺猬的躯体蜷曲和伸展。上述外壳也可为其他动物形状,例如虾蛄、虾、猫等。
17.优选方案中,上述玩具动物还包括行走机构,行走机构设于机芯箱体上。
18.更优选方案中,上述行走机构包括第二电动机、前轮轴、两个前轮、后轮轴和两个后轮,前轮轴、后轮轴均可转动安装在机芯箱体底部,两个前轮分别固定安装在前轮轴两端,两个后轮分别固定安装在后轮轴两端,第二电动机的动力输出轴与前轮轴或后轮轴传动连接。
19.上述玩具动物还可包括两个前脚壳体,两个前脚壳体与两个前轮一一对应,前脚壳体下端与前轮上偏离前轮轴的位置铰接,前脚壳体上部设有上下走向的前脚条形导引孔,机芯箱体上设有前脚定位销,前脚定位销处在前脚条形导引孔中。前轮转动时,带动前脚壳体的下端随之绕前轮轴转动,模仿迈步动作。
20.上述玩具动物还可包括两个后脚壳体,两个后脚壳体与两个后轮一一对应,后脚壳体下端与后轮上偏离后轮轴的位置铰接,后脚壳体上部设有上下走向的后脚条形导引孔,机芯箱体上设有后脚定位销,后脚定位销处在后脚条形导引孔中。后轮转动时,带动后脚壳体的下端随之绕后轮轴转动,模仿迈步动作。
21.上述第一电动机、第二电动机的启停可采用遥控装置控制。
22.本实用新型利用蜷曲伸展机构驱动各活动壳体分别绕其转动轴线摆动,使外壳形状发生变化,从而模仿动物躯体蜷曲、伸展的动作,娱乐性和可玩性强。
附图说明
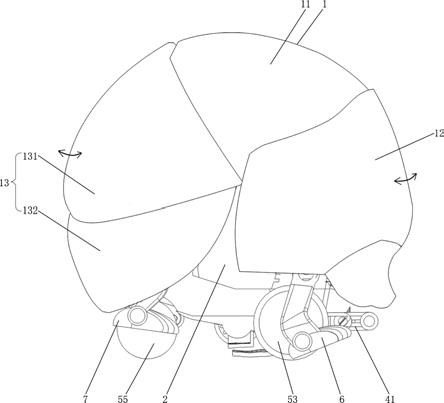
23.图1是本实用新型优选实施例的总体结构示意图(伸展状态);
24.图2是本实用新型优选实施例中蜷曲伸展机构与前活动壳体、后活动壳体配合的
结构示意图;
25.图3是本实用新型优选实施例中蜷曲伸展机构的结构示意图;
26.图4是本实用新型优选实施例中蜷曲伸展机构另一视角的结构示意图;
27.图5是本实用新型优选实施例中内箱体内部结构的示意图;
28.图6是本实用新型优选实施例中翻筋斗机构的结构示意图;
29.图7是本实用新型优选实施例中翻筋斗机构另一视角的结构示意图。
具体实施方式
30.如图1和图2所示,这种玩具动物包括外壳1和机芯箱体2,外壳1包覆在机芯箱体2外面。外壳1包括有至少两个活动壳体,本实施例中,外壳1包括一个固定壳体11和两个活动壳体,两个活动壳体分别为前活动壳体12和后活动壳体13,前活动壳体12处于固定壳体11的前侧,后活动壳体13处于固定壳体11的后侧;固定壳体11处在机芯箱体2的上方并与机芯箱体2顶部固定连接;前活动壳体12处在机芯箱体2的前方,前活动壳体12后端的上边沿通过前转轴14与固定壳体前端11可转动连接(前活动壳体12也可与机芯箱体可转动连接),前转轴14的轴线为左右走向;后活动壳体13前端的上边沿通过后转轴15与固定壳体11后端可转动连接(后活动壳体13也可与机芯箱体可转动连接),后转轴15的轴线为左右走向。前转轴14可由轴线相重合的两个前轴头组成,两个前轴头左右并排;后转轴15可由轴线相重合的两个后轴头组成,两个后轴头左右并排。
31.机芯箱体2中设有能够驱动各活动壳体12、13分别绕其转动轴线转动的蜷曲伸展机构,蜷曲伸展机构能够驱动前活动壳体12绕前转轴14转动并驱动后活动壳体13绕后转轴15转动。
32.参考图2
‑
图5,蜷曲伸展机构包括内箱体31、第一电动机32、横向驱动轴33、驱动盘34、升降滑板35、前连杆机构和后连杆机构。
33.内箱体31、横向驱动轴33、驱动盘34和升降滑板35均处在机芯箱体2中;第一电动机32安装在内箱体31中,横向驱动轴33可转动安装在内箱体31上,横向驱动轴33的轴线为左右走向,第一电动机32的动力输出轴与横向驱动轴33传动连接并且能够驱动横向驱动轴33转动;驱动盘34固定安装在横向驱动轴33上,驱动盘34上偏离横向驱动轴轴线的位置设有驱动插柱36,升降滑板35安装在内箱体31外侧并且可相对于内箱体31上下移动,升降滑板35上设有前后走向的条形插孔37,驱动插柱36处在条形插孔37中;升降滑板35上设有前动力输出轴38和后动力输出轴39,前动力输出轴38和后动力输出轴39的轴线均为左右走向;机芯箱体2上设有上下走向的前条形导引孔21和上下走向的后条形导引孔22,前动力输出轴38处在前条形导引孔21中,后动力输出轴39处在后条形导引孔22中。驱动插柱36、前动力输出轴38、后动力输出轴39为圆柱状。
34.前连杆机构包括前摆臂310,前摆臂310的第一端与前动力输出轴38可转动连接(可在前摆臂310的第一端上设有圆形套孔315,前动力输出轴38处在该圆形套孔315中),前摆臂310的第二端与前活动壳体12铰接。
35.后连杆机构包括后摆臂311和第一后连杆312,后摆臂311的第一端上设有沿后摆臂长度方向延伸的第一条形套孔313,后动力输出轴39处在第一条形套孔313中,后摆臂311的第二端与机芯箱体2可转动连接,后摆臂311的第二端与第一后连杆312的第一端连接,第
一后连杆312的第二端上设有第一后插销314,后活动壳体13上设有条形的第一后插销插孔16(第一后插销插孔16大致为上下走向;可在后活动壳体13的内表面上固定安装一条形板17,第一后插销插孔16设在该条形板17上),第一后插销314处在第一后插销插孔16中。本实施例中,前摆臂310的第一端为上端、第二端为下端,前摆臂310第二端与前活动壳体12的铰接处位置低于前转轴14。后摆臂311与第一后连杆312之间具有一夹角,两者连接后呈v形;后摆臂311的第二端与第一后连杆312的第一端一体连接。机芯箱体2上设有左右走向的第一销轴23,后摆臂311的第二端上设有第一销孔316,第一销轴23处在第一销孔316中,使后摆臂311和第一后连杆312能够绕第一销轴23转动。第一条形套孔313大致为前后走向,后摆臂311的第一端为前端、第二端为后端。
36.后连杆机构还包括第二后连杆317、第三后连杆318和第四后连杆319,第二后连杆317的第一端与后摆臂311连接,第二后连杆317的第二端上设有第二后插销320,第三后连杆318的第一端上设有条形的第二后插销插孔321,第二后插销插孔321沿第三后连杆的长度方向延伸,第二后插销320处在第二后插销插孔321中,第三后连杆318的第二端与机芯箱体2可转动连接,第四后连杆319的第一端与第三后连杆318的第二端连接(第四后连杆319的第一端可与第三后连杆318的第二端一体连接),第四后连杆319的第二端上设有第三后插销322,后活动壳体13上设有条形的第三后插销插孔18(第三后插销插孔18大致为上下走向;可在后活动壳体13的内表面上固定安装一条形板19,第三后插销插孔18设在该条形板19上),第三后插销322处在第三后插销插孔18中。第一后插销插孔16、第三后插销插孔18设于后活动壳体13的不同部位,这种情况下,后活动壳体13分为两部分131、132,这两部分131、132之间可小幅度相对转动,第一后插销插16、第三后插销插孔18分别设在这两部分上。机芯箱体2上设有左右走向的第二销轴24,第三后连杆318的第二端上设有第二销孔323,第二销轴24处在第二销孔323中,使第三后连杆318和第四后连杆319能够绕第二销轴24转动。
37.内箱体31的侧壁上设有多个定位导引块324,升降滑板35上设有多个上下走向的条形定位导引孔325,条形定位导引孔325与定位导引块324数量相同且一一对应,定位导引块324处于对应的条形定位导引孔325中。可在定位导引块上设有螺孔,螺孔中安装螺钉,螺钉头部的外径大于对应的条形定位导引孔的宽度,升降滑板处于各螺钉头部与内箱体的侧壁之间。
38.参考图4,为了使两个活动壳体12、13转动时受力均衡,驱动盘34、升降滑板35、前连杆机构和后连杆机构都设有两个,并且左右对称。第一电动机32的动力输出轴驱动横向驱动轴33转动时,两个驱动盘34同时随着转动,通过两个升降滑板35带动两个前连杆机构同步动作,两个后连杆机构也同步动作。
39.本实施例中,第一电动机32的动力输出轴通过齿轮组326与横向驱动轴33传动连接。
40.参考图6和图7,本实施例的玩具动物还包括翻筋斗机构,翻筋斗机构包括翻筋斗摆杆41、翻筋斗摆杆传动齿轮42和翻筋斗摆杆定位轴43,翻筋斗摆杆定位轴43可转动安装在机芯箱体2底部,翻筋斗摆杆定位轴43的轴线为左右走向,翻筋斗摆杆传动齿轮42固定安装在翻筋斗摆杆定位轴43上,翻筋斗摆杆传动齿轮42与一电动机的动力输出轴传动连接(驱动盘34的圆周面上设有弧形齿条44,弧形齿条44约占驱动盘34的圆周面的1/4至1/3,弧
形齿条44能够与翻筋斗摆杆传动齿轮42啮合,这种情况下,采用第一电动机32作为翻筋斗动作的动力源,即翻筋斗摆杆传动齿轮42与第一电动机32的动力输出轴传动连接);翻筋斗摆杆41处在机芯箱体2下侧,翻筋斗摆杆41的后端与翻筋斗摆杆定位轴43连接(翻筋斗摆杆的前端为自由端)。翻筋斗摆杆定位轴43上可套接一扭力弹簧,扭力弹簧的两个扭力臂分别与机芯箱体2底部、翻筋斗摆杆41连接或接触,扭力弹簧对翻筋斗摆杆41施加作用力,使翻筋斗摆杆41具有朝向机芯箱体2底部摆动的趋势,用于使翻筋斗摆杆41能够自动复位。
41.本实施例的外壳1为刺猬形状,在蜷曲伸展机构的驱动下模仿刺猬的躯体蜷曲和伸展。外壳也可为其他动物形状,例如虾蛄、虾、猫等。
42.参考图2和图5,本实施例的玩具动物还包括行走机构,行走机构设于机芯箱体2上。行走机构包括第二电动机51、前轮轴52、两个前轮53、后轮轴54和两个后轮55,前轮轴52、后轮轴54均可转动安装在机芯箱体2底部,两个前轮53分别固定安装在前轮轴52两端,两个后轮55分别固定安装在后轮轴54两端,第二电动机51的动力输出轴通过齿轮组56与前轮轴52传动连接(也可以第二电动机51的动力输出轴与后轮轴54传动连接)。第二电动机51和齿轮组56可设于内箱体31中。第二电动机51启动时,通过齿轮组56带动前轮轴52及两个前轮53转动,使玩具动物行走。
43.本实施例的玩具动物还包括两个前脚壳体6,两个前脚壳体6与两个前轮53一一对应,前脚壳体6下端与前轮53上偏离前轮轴52的位置铰接,前脚壳体6上部设有上下走向的前脚条形导引孔61,机芯箱体2上设有前脚定位销62,前脚定位销62处在前脚条形导引孔61中。前轮53转动时,带动前脚壳体6的下端随之绕前轮轴53转动,模仿迈步动作。
44.本实施例的玩具动物还包括两个后脚壳体7,两个后脚壳体7与两个后轮55一一对应,后脚壳体7下端与后轮55上偏离后轮轴54的位置铰接,后脚壳体7上部设有上下走向的后脚条形导引孔71,机芯箱体2上设有后脚定位销72,后脚定位销72处在后脚条形导引孔71中。后轮55转动时,带动后脚壳体7的下端随之绕后轮轴54转动,模仿迈步动作。
45.第一电动机32、第二电动机51的启停可采用遥控装置控制。
46.在蜷曲伸展机构驱动下,前活动壳体12和后活动壳体13相向转动或相背转动。当两个活动壳体12、13相向转动时(前活动壳体12的前端向后摆动,同时后活动壳体13的后端向前摆动),两个活动壳体12、13同时向机芯箱体2靠拢,模仿动物躯体蜷曲动作。当两个活动壳体12、13相背转动时(前活动壳体12的前端向前摆动,同时后活动壳体13的后端向后摆动),两个活动壳体12、13同时远离机芯箱体2,模仿动物躯体伸展动作。两个活动壳体12、13的转动方向如图1中的箭头所示。
47.第一电动机32启动时,其动力输出轴驱动横向驱动轴33和驱动盘34转动;驱动插柱36绕驱动轴33做圆周运动,驱动插柱36在做圆周运动的过程中对条形插孔37的上边沿或下边沿施加作用力,带动升降滑板35相对于内箱体31上下移动,升降滑板35上的前动力输出轴38和后动力输出轴39同时随升降滑板35上下移动(前动力输出轴38在前条形导引孔21中上下移动,后动力输出轴39在后条形导引孔22中上下移动)。
48.前动力输出轴38上下移动时,带动前摆臂310的第一端随着上下移动,此时前摆臂310与前条形导引孔21之间的夹角发生变化,前摆臂310的第二端带动前活动壳体12绕前转轴14摆动。
49.后动力输出轴39上下移动时,对第一条形套孔313的边沿施加作用力,使后摆臂
311和第一后连杆312绕第一销轴23转动;第一后连杆312第二端上的第一后插销314绕第一销轴23运动,第一后插销314在运动过程中对条形的第一后插销插孔16的边沿施加作用力,带动后活动壳体13绕后转轴15摆动。后摆臂311绕第一销轴23转动时,第二后连杆317也随着绕第一销轴23转动,第二后连杆317第二端上的第二后插销320绕第一销轴23运动,第二后插销320在运动过程中对条形的第二后插销插孔321的边沿施加作用力,带动第三后连杆318和第四后连杆319绕第二销轴24转动,第四后连杆319第二端上的第三后插销322绕第二销轴24运动,第三后插销322在运动过程中对条形的第三后插销插孔18的边沿施加作用力,带动后活动壳体运动。第一后插销插孔16、第三后插销插孔18设于后活动壳体13的不同部位,这种情况下,后活动壳体13分为两部分131、132,这两部分131、132之间可小幅度相对转动,第一后插销插16、第三后插销插孔18分别设在这两部分131、132上,第一后插销314、第三后插销322分别带动这两部分131、132。
50.驱动盘34转动的过程中,当转动至弧形齿条44与翻筋斗摆杆传动齿轮42啮合的位置时,驱动翻筋斗摆杆传动齿轮42转动,此时翻筋斗摆杆41摆动;翻筋斗摆杆41的自由端绕翻筋斗摆杆定位轴43向下摆动时,将机芯箱体2及外壳1的前端抬高,使玩具动物的后端接触到地面(通常外壳1的后端接触到地面),形成支撑点,当整个玩具动物的重心越过支撑点时,玩具动物向后翻滚,实现玩具动物向后翻筋斗的动作。当弧形齿条44末端越过翻筋斗摆杆传动齿轮42时,驱动盘34的圆周面上平滑的部分与翻筋斗摆杆传动齿轮42对应,此时驱动盘34无法带动翻筋斗摆杆传动齿轮42转动,翻筋斗摆杆42可在扭力弹簧的作用下复位。
51.其他实施方案中,后活动壳体也可制成一个整体,后连杆机构包括后摆臂和第一后连杆,后摆臂的第一端上设有沿后摆臂长度方向延伸的第一条形套孔,后动力输出轴处在第一条形套孔中,后摆臂的第二端与机芯箱体可转动连接,后摆臂的第二端与第一后连杆的第一端连接,第一后连杆的第二端上设有第一后插销,后活动壳体上设有条形的第一后插销插孔(第一后插销插孔大致为上下走向;可在后活动壳体的内表面上固定安装一条形板,第一后插销插孔设在该条形板上),第一后插销处在第一后插销插孔中。这种方案中无需设置第二后连杆、第三后连杆和第四后连杆。
52.其他实施方案中,前活动壳体也可以采用与后连杆机构类似的机构驱动,后活动壳体也可以采用与前连杆机构类似的机构驱动。
53.其他实施方案中,也可以翻筋斗摆杆的前端与翻筋斗摆杆定位轴连接,这种情况下,翻筋斗摆杆的后端为自由端,翻筋斗摆杆的自由端绕翻筋斗摆杆定位轴向下摆动时,可实现实现玩具动物向前翻筋斗的动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1