一种可以自适应外部扩展的积木机器人的制作方法
1.本实用新型涉及幼儿编程积木技术领域,具体涉及一种可以自适应外部扩展的积木机器人。
背景技术:
2.目前,市场上具有各式各样的积木机器人,其中有使用激光发射器的原理实现机器人扩展的功能的;有使用机器视觉模块搜集机器人周边影像的原理或者网络通信的原理,实现机器人躲避障碍物的功能的;有使用巡线避障模块结合超声波等传感器实现机器人巡线的功能的;有使用远程无线遥控的方式完成机器人避障的功能;有结合外部结构实现追光的功能的;有结合太阳能板实现追光的功能的;有实现具有玩具性质的追光模式。但是其均有以下缺点:不能自适应外部扩展,需要结合外部多个传感器实现功能;需要借助外部远程控制等方式实现通信;偏玩具性质,可玩性及教育性价值不高,不可升级扩展,幼儿阶段不方便使用。
技术实现要素:
3.为克服所述不足,本发明的目的在于提供一种可以自适应外部扩展的积木机器人。
4.本实用新型解决其技术问题所采用的技术方案是:一种可以自适应外部扩展的积木机器人,包括主控机器人、光电模块、光线模块,所述主控机器人包括控制电路、驱动电机、电源、滚轮、输入磁吸接口;
5.所述光电模块的一侧设有光电探测头、光电指示灯,光线模块的一侧设有用光敏传感器、光线指示灯,光电模块、光线模块外侧分别内设有上设有处理电路,光电模块、光线模块上均设有输出磁吸接口,所述光敏传感器、光电探测头分别通过处理电路与输出磁吸接口相连接。
6.具体地,还包括转接座,转接座的侧面设有输出磁吸接口,转接座的上面设有输入磁吸接口,所述光电模块通过转接座吸附至主控机器人的输入端,用于转换光电模块、光线模块的检测方向。
7.具体地,所述输入磁吸接口、输出磁吸接口内设有四个引脚,分别为正极引脚、负极引脚、类型引脚、识别引脚,所述正极引脚、负极引脚作用是为光电模块、光线模块供电使用,类型引脚连接一个 id电阻与处理芯片相连接,识别引脚主要是数据通信、传输信号功能。
8.具体地,所述处理电路采用atmega8a
‑
au处理芯片,处理芯片的引脚分别与输出磁吸接口的四个引脚相连接,处理芯片分别与对应的光电探测头、光敏传感器、光线指示灯相连接。
9.具体地,所述主控机器人内设有两个驱动电机,一个驱动电机控制一个滚轮,所述控制电路内设有单片机通过电源电路与电源相连接。
10.本实用新型具有以下有益效果:本实用新型操作方式简单,适合幼儿用户使用;不借助上位机,只需用户将相应输入模块放置于机器人的输入端,供电后机器人即可自动执行实现上述方案;可以自适应外部扩展,自动调整处理方法;不需要借助外部远程控制等方式实现通信;可玩性及教育性价值高,使用食品级abs安全性高,可升级扩展,方便使用,可以实现清晰的顺序和逻辑,可以锻炼孩子的规则意识。
附图说明
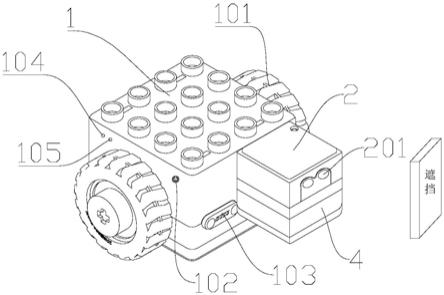
11.图1为本实用新型的主控机器人结构示意图。
12.图2为本实用新型的控制电路图一。
13.图3为本实用新型的控制电路图二。
14.图4为本实用新型的光电模块电路图。
15.图5为本实用新型的光线模块电路图。
16.图6为本实用新型的实施例1的示意图。
17.图7为本实用新型的实施例2的示意图。
18.图8为本实用新型的实施例3的示意图。
19.图9为本实用新型的实施例4的示意图。
20.图中1主控制器模块,101滚轮,102充电接口,104电量指示灯,105模块指示灯,2光电模块,201光电探测头,3光线模块,301 光敏传感器,302光线指示灯,4转接座,5光照,6寻迹线路。
具体实施方式
21.现在结合附图对本实用新型作进一步详细的说明。
22.实施例1:物体感应机器人
23.如图1
‑
5所示的一种可以自适应外部扩展的积木机器人,包括主控机器人1、光电模块2、光线模块3,所述主控机器人1包括控制电路、驱动电机、电源、滚轮101、输入磁吸接口103;
24.所述光电模块2的一侧设有光电探测头201、光电指示灯,光线模块3的一侧设有用光敏传感器301、光线指示灯301,光电模块2、光线模块3外侧分别内设有上设有处理电路,光电模块2、光线模块 3上均设有输出磁吸接口,所述光敏传感器301、光电探测头201分别通过处理电路与输出磁吸接口相连接。
25.具体地,还包括转接座4,转接座4的侧面设有输出磁吸接口,转接座4的上面设有输入磁吸接口,所述光电模块2通过转接座吸附至主控机器人1的输入端,用于转换光电模块2、光线模块3的检测方向。
26.具体地,所述输入磁吸接口103、输出磁吸接口内设有四个引脚,分别为正极引脚、负极引脚、类型引脚、识别引脚,所述正极引脚、负极引脚作用是为光电模块3、光线模块2供电使用,类型引脚连接一个id电阻与处理芯片相连接,识别引脚主要是数据通信、传输信号功能。
27.具体地,所述处理电路采用atmega8a
‑
au处理芯片,处理芯片的引脚分别与输出磁吸接口的四个引脚相连接,处理芯片分别与对应的光电探测头201、光敏传感器301、光线指
示灯302相连接。
28.具体地,所述主控机器人1内设有两个驱动电机,一个驱动电机控制一个滚轮101,所述控制电路内设有单片机通过电源电路与电源相连接。
29.如图6所示的一个所述光电模块3配合转接座4吸附至主控机器人1的输入端,使得光电模块的发射接收头面向前方感应物体;按下主控机器人1的电源开关,主控机器人1输入端的正负极通过转接座 4给光电模块3共供电,并通过身份识别引脚判断输入模块身份,确定输入端为光电模块3后,光电模块3中光电探测头301内部传感器将外界模拟量转换成数字信号,通过的数据通信引脚,将主控机器人 1内部单片机引脚变为低电平,内部单片机电路触发机器人两侧电机驱动电路变为低电平,使得机器人后退一步。
30.实施例2:光控机器人
31.如图7所示,采用主控机器人1和一个光线模块3,该光线模块 3磁吸吸附到主控机器人1的输入端,使得光线模块3的发射接收头面向前方感应物体,按主控机器人1电源按键,主控机器人1输入端的正负极通过转接座给光线模块3共供电,并通过身份识别引脚判断输入模块身份,确定输入端为光线模块3后,光线模块3内部传感器将外界模拟量转换成数字信号,通过数据通信引脚,将主控机器人1 内部控制电路的单片机引脚变为低电平,内部单片机电路控制主控机器人1两侧驱动电机,使得主控机器人1前进一步。
32.实施例3:追光机器人
33.如图8所示,采用主控机器人1和两个光线模块3;两个光线模块3通过输入磁吸接口103、输出磁吸接口吸附到主控机器人1上;按下主控机器人1电源按键,主控机器人1通过输入磁吸接口103、输出磁吸接口的正负极引脚分别给两光线模块3供电,并通过身份识别引脚检测输入端模块身份;光线模块3通电后,输入端左右光线模块3的光敏传感器301识别外部光照强度读取不同的模拟量输入信号,将信号通过数据传输引脚输送至主控机器人1内部控制电路的单片机,从而控制两侧驱动电机转动,带动滚轮101,哪侧光线模块检测的光照5强,机器人往哪边追赶,实现追光效果。
34.实施例4:寻迹机器人
35.如图9所示,采用一个主控机器人1和两个光电模块2,将两个光电模块2分别吸附到主控机器人1的输入端,按下主控机器人1电源按键,主控机器人1通过输入磁吸接口103、输出磁吸接口的正负极引脚分别给两个光电模块2供电,并通过各端口的身份识别引脚判断输入端模块身份;检测通电后,主控机器人1输入端左右两光电模块2的内部传感器检测地图上的寻迹线路6,主控机器人1读取不同的模拟量输入信号,将信号通过数据传输引脚输送至主控机器人1内部控制电路的单片机控制两侧电机驱动,左侧光电模块2检测到线路,主控机器人1执行左转指令,右侧光电模块2同理,从而实现寻迹效果。
36.注意:
37.如果主控机器人1检测不到输入端信号,则主控机器人1无动作;
38.光线模块3和光电模块2只能两两相同配合使用,不可混合使用。
39.本实用新型不局限于所述实施方式,任何人应得知在本实用新型的启示下作出的结构变化,凡是与本实用新型具有相同或相近的技术方案,均落入本实用新型的保护范围之内。
40.本实用新型未详细描述的技术、形状、构造部分均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1