一种球拍握拍姿态矫正手套
1.本发明属于矫正训练器材,具体为一种球拍握拍姿态矫正手套。
背景技术:
2.随着人们生活水平的不断提高,人们越来越注重体育锻炼,羽毛球运动由于其规则简单,而且对场地要求不高,人数要求也低,所以成为一项非常热门的运动。但是很少有人能够意识到羽毛球握拍的重要性,对于初学者来说经常忽视了基础的训练,转而注重高阶的技能,当习惯了错误握拍姿态之后,对于想要提高技能的人来说,要花很长时间进行改正。
3.目前市场上的姿态纠正的设备一般都是对挥拍时的运动数据进行采集,然后分析挥拍时的动作情况,没有对使用者手的握拍方式进行检测。正确的握拍方式能够使使用者轻松做出正确的技术动作,从而使打球能够更加科学,并且能够保护身体免于受伤。目前的握拍姿态矫正设备均为固定式矫正,使用者需要将手指固定在球拍特定位置,并且不能随意移动,容易造成危险。如:cn202011164636.1,其通过将使用者的手指固定在手套内部,手套固定住球拍上,该方法可以对使用者手部握拍姿态进行固定,但是该方法存在一定危险性,当使用者不慎跌倒,由于手部被固定在球拍上不能及时调整身体姿态,容易对身体造成伤害。并且由于姿态固定,单个矫正器只能纠正一种姿态,无法做到重复利用。
技术实现要素:
4.本发明的目的在于:本发明提供了一种球拍握拍姿态矫正手套,解决了现有矫正设备矫正姿态单一、存在危险性的问题。
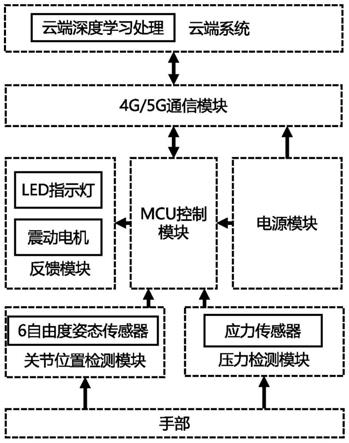
5.本发明对普通手套进行有限的改造,在不破坏原有结构的基础上,在手套内外表面添加mcu控制模块、关节位置检测模块、压力检测模块、电源模块、反馈模块以及4g/5g通讯模块,在云端搭建云端数据处理系统。mcu控制模块定时采集关节检测模块和压力检测模块的数据,对数据进行整理和打包,然后通过4g/5g模块传送到云端系统,然后接收和解析云端系统返回的数据,通过反馈模块提示用户当前握拍姿态的情况。关节位置检测模块固定在手部的特定关节上,将手部关节的在局部空间中的角度信息转换为数字信号,并提供高速数据接口方便外部读取。压力检测模块固定在手掌与羽毛球拍接触的位置,将手掌与羽毛球拍之间的压力转为数字信号存储,并提供数据接口方便外部读取。反馈模块将云端计算预测的结果反馈给用户,实时提醒用户当前握拍姿态的情况,当出现握拍姿态变形,则立马提醒用户进行改正,反馈需要有足够的辨识度,能让用户立马感知到反馈。电源模块采用锂电池存储电能,提供3.3v电源为mcu控制模块和4g/5g通讯模块供电,具备充电能力。4g/5g通讯模块与云端进行直连,形成高速数据通道,实时将采集的手部数据上传至云端,同时接收云端返回的数据发送给mcu模块。云端系统运行深度学习算法,实时接收手部数据,对手部数据进行预测分类,判断手部握拍姿态是否是正确的握拍姿态。
6.本发明目的通过下述技术方案来实现:
7.一种球拍握拍姿态矫正手套,主要由mcu控制模块、电源模块、反馈模块、关节位置检测模块、压力检测模块、4g/5g通讯模块,云端系统组成。
8.mcu控制模块用于管理整个设备的运行逻辑包括采样控制、通信控制以及反馈控制。为了确保数据采样不失真,mcu以50hz的采样频率高速读取各个传感器的数据,并将采样的数据通过数据压缩算法进行数据压缩,减少数据占用网络带宽。mcu通过4g/5g模块与云端建立socket通信,并且开启心跳服务与重连服务,定时发送心跳消息,防止设备与云端意外断联。将数据发送给云端之后异步等待云端数据返回,收到返回数据之后对数据进行协议解析,得到对手部姿态的识别结果。如果手部握拍姿态正确则关闭反馈模块警告,否则开启反馈模块中震动提示与led提示。
9.电源模块用于给设备提供稳定的电压源。电源模块包括一个大容量锂电池、充电电路、充电接口电路、短路保护电路、电量检测电路。锂电池用于存储接收从充电器到的电能。充电电路将外部充电器提供的电能充入锂电池。充电接口电路提供标准的usb充电接口,用来适配市场上大多数5v usb接口的充电器。短路保护电路用于当设备由于一些外部原因导致系统短路时,短路保护短路能够及时切断电源。电量检测电路实时监测锂电池剩余电量提示用户及时进行充电。
10.反馈模块用于反馈当前手部握拍姿态是否正确。反馈模块使用震动电机与led指示灯组合的方式来提示用户。震动电机采用微型小电机,体积小、质量轻,不会对用户手臂的挥动产生影响。当收到mcu的信号时,震动电机开始转动,提示用户当前的手部握拍姿态有误。超过一定时间之后,电机自动停止。等待下一次错误信号。每个led指示灯与手指一一对应,当检测出对应的手指的姿态错误时,该处led指示灯亮起,用于通知用户具体出错的位置,当对应的手指姿态正确时,该处led指示灯熄灭。
11.关节位置检测模块用于检测手指关节的位置情况。关节位置检测模块采用六自由度运动检测传感器,能够检测x、y、z三轴上的加速度和角速度。传感器安装在手部具有大范围活动的关节处,实现对整个手部巨大多数关节的位置情况的检测。每个传感器共享同一条总线,采用数字编码器控制传感器使能,实现所有传感器统一寻址。
12.压力检测模块用于检测手掌与球拍的接触情况。压力检测模块采用应变片作为接触时手掌和球拍接触时的压力检测传感器。这些应变片安装在手掌与球拍最容易接触的几个部分,如手指的指纹部分、手指根部以及虎口以下部分。使用mos管作为信号线路的开关,当mos管关短时,应变片信号被阻止,无法被mcu的adc模块检测到,成为断路。当mos管开启时,应变片信号被mcu的adc模块检测到,成为通路。为了使单次采样只能采集一个应变片的信号,使用数字编码器控制mos管的开关,等待一定时间被选中的信号达到稳定,此时可以进行采集。
13.4g/5g通讯模块实现mcu与云端服务器网络数据的透传。4g/5g通讯模块采用无线接收与发射的形式,隐藏底层无线通信协议,与mcu之间使用串口通信方式发送和接收数据。串口通信数据可分为控制指令与实际数据。控制指令用于对4g/5g模块进行网络配置,配置完成之后将会与云端建立起连接。实际数据则是mcu与云端交换的数据。
14.云端系统用于对接收手部姿态数据进行数据处理与存储。云端存储人握拍时手部各个关节的角度、位置、加速度以及手掌的压力数据,并对这些数据进行击球方式分类。采用深度学习网络对这些数据进行分类训练,得到手部握拍姿态数据与击球方式的预测模
型。模型形成之后,当有手部姿态数据上传到云端时,云端先对该数据使用击球方式预测模型进行分类获取到当前的击球状态,判断当前处于正手击球、反手击球等等不同击球方式。然后计算当前击球方式对应的最佳手部握拍姿态与当前实际握拍姿态的差异,如果差异大于一定阈值则提示当前握拍姿态有误,则需要对对应关节进行调整,并计算出需要调整的位置。
15.本发明的有益效果:
16.(1)本发明采用实时羽毛球握拍姿态预测,能够及时基于用户反馈,使其在运动过程中时刻注意握拍的正确性。
17.(2)本发明采用手套的形式,使用时不会对用户握拍的舒适性造成影响。相对于将手指固定在球拍上的姿态矫正球拍,该矫正手套更具有安全性。
18.(3)本发明非常适合于学习羽毛球的新人,使其在刚开始接触羽毛球的过程中注意握拍的重要性,培养出扎实的基础,有助于之后的技能提高。
19.前述本发明主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本发明可采用并要求保护的方案;且本发明,(各非冲突选择)选择之间以及和其他选择之间也可以自由组合。本领域技术人员在了解本发明方案后根据现有技术和公知常识可明了有多种组合,均为本发明所要保护的技术方案,在此不做穷举。
附图说明
20.图1为本发明的系统结构图。
21.图2为本发明的实际结构图。
22.图中:1-电源模块,2-通讯模块,21-mcu控制模块,37-不漏指手套,3、4、6、7、9、10、12、13、15、16、18、19、20-六自由度姿态传感器i~xiii,22~35-压力传感器i~xiv,5、8、11、14、17-led指示灯i~v,36-震动电机。
具体实施方式
23.下列非限制性实施例用于说明本发明。
24.实施例1:
25.本发明提供一种球拍握拍姿态矫正手套。如图1所示,手部的关节位置数据与压力数据通过角度传感器以及应力传感器被mcu控制模块以固定采样频率采集,然后mcu控制模块将采集的数据打包通过4g/5g通讯模块发往云端系统。云端系统使用深度学习算法,对数据进行预测分析得到当前手部的正确握拍姿态,通过计算得到实际的握拍姿态与正确握拍姿态之间的差异,并将结果返回给mcu控制模块。mcu控制模块接收到结果之后,如果实际握拍姿态与正确握拍姿态差别不大则不予提示,如果实际握拍姿态与正确握拍姿态有明显差异,则开启震动电机通知用户需要调整握拍姿态,并且通过led指示灯提示哪根手指的位置不正确。电源模块给mcu模块与4g/5g模块提供稳定电源,保障系统正确运行。
26.如图2所示,本发明整体外形采用市面上常用的不露指手套37,在手套内部和外部安装有相应的传感器和处理器。
27.手套背面:
28.在手腕部分,安装有电源模块1、mcu控制模块21以及通讯模块2。电源模块1包括大
容量锂电池、充电电路、充电接口电路、短路保护电路、电量检测电路。mcu控制模块21采用msp430系列低功耗微处理器,包含晶振电路、复位电路、电源滤波电路、led指示电路、按键电路。通讯模块2采用4g/5g微型全网通模块,可插入微型sim卡,使用串口115200波特率与mcu控制模块21通信,支持tcp、udp等多种网络通信协议。手腕部分的硬件电路均采用柔性fpc电路,使电路能够在一定程度上自由弯曲保障佩戴的舒适性。所有电子器件均选用表贴微型器件,器件排列布局保持一定程度的间隙,进一步提高手腕部分的柔性与舒适性。锂电池采用500mah大容量锂电池,保证设备正常运行5小时以上。
29.在手背部分,在腕关节中心部分安装一个六自由度姿态传感器i 3检测手掌的朝向以及云端情况,该处作为手部运动状态的参考点。因为大拇指掌骨的活动空间较大,大拇指掌骨处安装一个六自由度姿态传感器ii 4,来为计算大拇指的位置提供参考数据。在大拇指第一根指骨上安装一个六自由度姿态传感器iii6,在拇指第二根指骨上安装一个六自由度姿态传感器iv 7。根据姿态传感器i、ii、iii、iv的数据以及空间变换算法,可以计算出大拇指部分每个关节的大致坐标。由于食指对应的掌骨活动空间很小,所以不需要安装姿态传感器,在食指第一根指骨上安装一个六自由度姿态传感器v 9,在食指第三根指骨上安装一个六自由度姿态传感器vi 10。根据姿态传感器i、v、vi的数据以及空间变换算法,可以计算出食指部分每个关节的大致坐标。由于中指对应的掌骨活动空间很小,所以不需要安装姿态传感器,在中指第一根指骨上安装一个六自由度姿态传感器vii 12,在中指第三根指骨上安装一个六自由度姿态传感器viii 13。根据姿态传感器i、vii、viii的数据以及空间变换算法,可以计算出中指部分每个关节的大致坐标。由于无名指对应的掌骨活动空间很小,所以不需要安装姿态传感器,在无名指第一根指骨上安装一个六自由度姿态传感器ix 15,在无名指第三根指骨上安装一个六自由度姿态传感器x16。根据姿态传感器i、ix、x的数据以及空间变换算法,可以计算出无名指部分每个关节的大致坐标。因为小指掌骨的活动空间较大,小指掌骨处安装一个六自由度姿态传感器xiii 20来为计算小指的位置提供参考数据。在小指第一根指骨上安装一个六自由度姿态传感器xi 18,在小指第二根指骨上安装一个六自由度姿态传感器xii 19。根据姿态传感器i、xiii、xi、xii的数据以及空间变换算法,可以计算出小指部分每个关节的大致坐标。为了节省mcu的io接口,所有的姿态传感器与mcu通信均采用总线的方式,所有数据均汇聚到相同的io接口上,使用数字编码器进行片选,只有被选中的传感器才能和mcu通信。mcu依次姿态传感器进行通信读取每个关节的位置信息。
30.在拇指指关节处安装led指示灯i 5,来标识拇指位置是否正确。在食指指关节处安装led指示灯ii 8,来标识食指位置是否正确。在中指指关节处安装led指示灯iii 11,来标识中指位置是否正确。在无名指指关节处安装led指示灯iv 14,来标识无名指位置是否正确。在小指指关节处安装led指示灯v17,来标识小指位置是否正确。以上所有姿态传感器以及led指示灯均采用柔性fpc电路,提高手套的舒适度。
31.手套正面:
32.考虑到手部的灵活性,需要尽量减少不必要的物品在手掌附近,并且考虑到电机的不可弯曲性,因此选择在不可弯曲的手腕安装一个微型震动电机36,当收到mcu控制模块发出的信号时开始震动,当收到停止信号时停止震动。为了尽可能多采集到手掌与羽毛球拍的受力信息,选取了与球拍接触最紧密的几个点作为压力检测点。在大鱼肌上安装应变
片xiv 35检测该处的压力信息。在拇指指纹部分安装应变片xiii 34检测拇指指纹处的压力信息。在食指指关节部分安装应变片x 31,在第一节部分安装应变片xi 32,以及在食指指纹处安装应变片xii 33,检测食指部分的受力信息。在中指指关节部分安装应变片vii 28,在第一节部分安装应变片viii 29,以及在中指指纹处安装应变片ix 30,检测中指部分的受力信息。在无名指指关节部分安装应变片iv 25,在第一节部分安装应变片v 26,以及在无名指指纹处安装应变片vi 27,检测无名指部分的受力信息。在小指指关节部分安装应变片i 22,在第一节部分安装应变片ii 23,以及在小指指纹处安装应变片iii 24,检测小指部分的受力信息。所有的应变片信号接口就通过柔性fpc与mcu上的adc相连接,每路信号采用mos管控制信号通断。采用数字编码器作为mos管的通断信号,mcu控制模块依次导通一个应变片信号,带数据稳定之后采集压力信息,然后mcu控制模块断开该条信号通路。
33.云端系统采用高性能用于深度学习的服务器,该服务器需要具备账号管理系统、用户数据系统、深度学习预测系统,以及其他基础系统。账号管理系统管理用户基本信息,增加以及删除用户。用户数据系统存储用户的上传的手部姿态数据,可随时查询历史姿态信息,提供查询接口,以及可视化ui。深度学习预测系统可以进行手部运动与击球方式的预测训练,得到预测模型。模型形成之后,当有手部姿态数据上传到云端时,云端先对该数据使用击球方式预测模型进行分类获取到当前的击球状态,判断当前处于正手击球、反手击球等等不同击球方式。然后计算当前击球方式对应的最佳手部姿态与当前实际姿态的差异,如果差异大于一定阈值则提示当前握拍姿态有误,则需要对对应关节进行调整,并计算出需要调整的位置。
34.前述本发明基本例及其各进一步选择例可以自由组合以形成多个实施例,均为本发明可采用并要求保护的实施例。本发明方案中,各选择例,与其他任何基本例和选择例都可以进行任意组合。
35.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1