一种车模可伸缩车臂装置的制作方法
1.本实用新型涉及车模技术领域,具体涉及一种车模可伸缩车臂装置。
背景技术:
2.车模即汽车模型,是完全依照真车的形状、结构、色彩,严格按比例缩小而制作的比例模型。车模因为其真实的再现原车主要特征,做工精良,其本身蕴含着的是汽车文化,具有很高的收藏价值。
3.现有的车模通常只具有汽车的外观,而缺乏汽车内配的零配件以及汽车原有的使用功能,虽然能够满足观赏的效果,但是缺少趣味性。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型提供的一种车模可伸缩车臂装置,增加了车模的功能性和趣味性。
5.为了解决上述技术问题,本实用新型提出以下技术方案:
6.一种车模可伸缩车臂装置,包括车体底盘,所述车体底盘上设有弯曲的吊臂和用于驱动吊臂转动的第一伸缩机构,第一伸缩机构和吊臂的一端均与车体底盘转动连接,第一伸缩机构的另一端与吊臂的弯曲部转动连接,吊臂远离车体底盘的一端设有铲斗组件和用于驱动铲斗组件转动的第二伸缩机构,铲斗组件与吊臂转动连接,第二伸缩机构与吊臂转动连接。
7.进一步地,所述铲斗组件包括铲斗和转动臂,转动臂的一端与第二伸缩机构转动连接,转动臂的另一端与铲斗转动连接,转动臂的凸起部与吊臂的端部转动连接,转动臂上设有第三伸缩机构,第三伸缩机构的一端与转动臂转动连接,第三伸缩机构的另一端通过连接件与铲斗转动连接。
8.进一步地,所述连接件包括v型连杆和连动杆,v型连杆的一端与转动臂转动连接,连动杆的一端与铲斗转动连接,v型连杆的另一端和连动杆的另一端通过转动轴连接,第三伸缩机构与转动轴转动连接。
9.进一步地,所述第一伸缩机构包括第一伸缩杆和第一套杆,第一伸缩杆和第一套杆滑动连接,第一套杆与吊臂的弯曲部转动连接,第一伸缩杆与车体底盘转动连接。
10.进一步地,所述第二伸缩机构包括第二伸缩杆和第二套杆,第二伸缩杆和第二套杆滑动连接,第二套杆与吊臂转动连接,第二伸缩杆与转动臂转动连接。
11.进一步地,所述第三伸缩机构包括第三伸缩杆和第三套杆,第三伸缩杆和第三套杆滑动连接,第三套杆与转动臂转动连接,第三伸缩杆与转动轴转动连接。
12.由上述技术方案可知,本实用新型的有益效果:通过第一伸缩机构的伸缩驱动吊臂转动,使吊臂与车体底盘之间的夹角发生变化,实现吊臂的位置调整,同时,第一伸缩机构能够支撑吊臂,使吊臂与车体底盘之间的相对位置不发生变化,第二伸缩机构的伸缩驱动铲斗组件与吊臂之间的夹角发生变化,实现铲斗组件的位置调整,同时,第二伸缩机构能
够支撑铲斗组件,使铲斗组件与吊臂之间的相对位置不发生变化,保持铲斗组件与车体底盘之间的稳定性,同时,增加了车模的功能性和趣味性。
附图说明
13.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
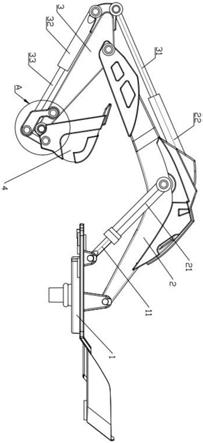
14.图1为本实用新型的结构示意图;
15.图2为本实用新型a处的放大图。
16.附图标记:
[0017]1‑
车体底盘;2
‑
吊臂;3
‑
转动臂;4
‑
铲斗;
[0018]
11
‑
第一伸缩杆;21
‑
第一套杆;22
‑
第二套杆;31
‑
第二伸缩杆;32
‑
第三套杆;33
‑
第三伸缩杆;34
‑
v型连杆;35
‑
连动杆;36
‑
转动轴。
具体实施方式
[0019]
下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
[0020]
参阅图1
‑
图2所示,本实施例提供的一种车模可伸缩车臂装置,包括车体底盘1,车体底盘1上设有弯曲的吊臂2和用于驱动吊臂2转动的第一伸缩机构,第一伸缩机构和吊臂2的一端均与车体底盘1转动连接,第一伸缩机构的另一端与吊臂2的弯曲部转动连接,吊臂2远离车体底盘1的一端设有铲斗组件和用于驱动铲斗组件转动的第二伸缩机构,铲斗组件与吊臂2转动连接,第二伸缩机构与吊臂2转动连接。
[0021]
在实际使用中,通过第一伸缩机构的伸缩驱动吊臂2转动,使吊臂2与车体底盘1之间的夹角发生变化,实现吊臂2的位置调整,同时,第一伸缩机构能够支撑吊臂2,使吊臂2与车体底盘1之间的相对位置不发生变化,第二伸缩机构的伸缩驱动铲斗组件与吊臂2之间的夹角发生变化,实现铲斗组件的位置调整,同时,第二伸缩机构能够支撑铲斗组件,使铲斗组件与吊臂2之间的相对位置不发生变化,保持铲斗组件与车体底盘1之间的稳定性,同时,增加了车模的功能性和趣味性。为了增大吊臂2端部的转动角度,将吊臂2的弯曲角度设置为大于90度。
[0022]
在本实施例中,铲斗组件包括铲斗4和转动臂3,转动臂3的一端与第二伸缩机构转动连接,转动臂3的另一端与铲斗4转动连接,转动臂3的凸起部与吊臂2的端部转动连接,转动臂3上设有第三伸缩机构,第三伸缩机构的一端与转动臂3转动连接,第三伸缩机构的另一端通过连接件与铲斗4转动连接。
[0023]
在实际使用中,第二伸缩机构的伸缩带动转动臂3与吊臂2之间的夹角变化,第三伸缩机构的伸缩带动铲斗4与转动臂3之间的夹角发生变化,实现铲斗4位置的调整,同时,第三伸缩机构能够支撑铲斗4,使铲斗4与转动臂3之间的相对位置不发生变化,保持铲斗4与车体底盘1之间的稳定性。
[0024]
在本实施例中,连接件包括v型连杆34和连动杆35,v型连杆34的一端与转动臂3转动连接,连动杆35的一端与铲斗4转动连接,v型连杆34的另一端和连动杆35的另一端通过转动轴36连接,第三伸缩机构与转动轴36转动连接。
[0025]
在实际使用中,通过第三伸缩机构的伸缩推动或拉动转动轴36,通过转动轴36带动连动杆35移动,连动杆35移动带动铲斗4与转动臂3之间夹角的变化,实现铲斗4位置的调整;另外,v型连杆34的设置能够支撑转动轴36,加强连动杆35、v型连杆34以及第三驱动机构之间连接的稳定性。
[0026]
在本实施例中,第一伸缩机构包括第一伸缩杆11和第一套杆21,第一伸缩杆11和第一套杆21滑动连接,第一套杆21与吊臂2的弯曲部转动连接,第一伸缩杆11与车体底盘1转动连接。
[0027]
在实际使用中,第一伸缩杆11在外力的拉动或推动作用下可相对于第一套杆21滑动,且考虑到吊臂2与车体底盘1的稳定性,需要将第一伸缩杆11和第一套杆21之间的摩擦力和安装紧固力选在合适的范围,以满足在第一伸缩杆11和第一套杆21在不受外力作用的情况下,相对位置保持不变。
[0028]
在本实施例中,第二伸缩机构包括第二伸缩杆31和第二套杆22,第二伸缩杆31和第二套杆22滑动连接,第二套杆22与吊臂2转动连接,第二伸缩杆31与转动臂3转动连接。
[0029]
在实际使用中,第二伸缩杆31在外力的拉动或推动作用下可相对于第二套杆22滑动,且考虑到吊臂2与转动臂3之间的稳定性,需要将第二伸缩杆31和第二套杆22之间的摩擦力和安装紧固力选在合适的范围,以满足在第二伸缩杆31和第二套杆22在不受外力作用的情况下,相对位置保持不变。
[0030]
在本实施例中,第三伸缩机构包括第三伸缩杆33和第三套杆32,第三伸缩杆33和第三套杆32滑动连接,第三套杆32与转动臂3转动连接,第三伸缩杆33与转动轴36转动连接。
[0031]
在实际使用中,第三伸缩杆33在外力的拉动或推动作用下可相对于第三套杆32滑动,且考虑到铲斗4与转动臂3之间的稳定性,需要将第三伸缩杆33和第三套杆32之间的摩擦力和安装紧固力选在合适的范围,以满足在第三伸缩杆33和第三套杆32在不受外力作用的情况下,相对位置保持不变。
[0032]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1