一种超越离合爬杆载体
1.本实用新型属于爬杆领域,特别涉及一种超越离合爬杆载体。
背景技术:
2.随着经济的迅猛发展以及城市现代化建设步伐的加快,随之矗立起愈来愈多各类集实用性与美观性于一体的市政、商业工程等高层建筑和高空作业场合,爬杆装置作为爬杆机器人领域一个重要组成部分,作为一个运送载体,其主要功能是可靠地携带相关清洗、检修等设备,克服重力的作用依附于管道、电线杆、路灯杆、大桥斜拉索和变电站避雷针等高层杆状物表面进行爬行和在高空进行作业,以协助完成清洗、检测、维护等高空作业相关任务。
技术实现要素:
3.本实用新型的目的:为协助完成清洗、检测、维护等高空作业相关任务,本实用新型研制一种超越离合爬杆载体,该爬杆载体在双脚交替上提和下蹬驱动下能携带相关清洗、检修等设备沿杆向上移动,并可在攀爬到一定高度时进行相关高空作业。
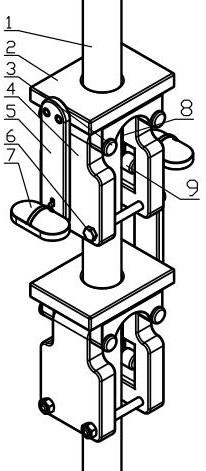
4.本实用新型的技术方案是:一种超越离合爬杆载体,其本体由上超越离合装置、下超越离合装置和攀爬杆1组成,其特征是所述的上超越离合装置和下超越离合装置结构相同,每个超越离合装置由1个上支撑板2、两个对称布置的转动销3、两个对称布置的斜夹板4、1个脚蹬连杆5、两个对称布置的连接螺栓6、1个脚蹬7、两个对称布置的拉簧8和两个对称布置的双联滚柱9组成,所述的双联滚柱9中间为一段细圆柱,两端为两个尺寸一样的粗滚柱,所述的斜夹板4内表面有一个斜槽10,双联滚柱9两端粗滚柱端面和斜夹板4的斜槽10的两侧内表面组成大间隙配合,双联滚柱9的粗滚柱的滚动面在拉簧8拉力作用下紧贴在攀爬杆1和斜槽10的斜面上,所述的两个对称布置的斜夹板4通过2个转动销3和上支撑板2组成转动副,所述的上支撑板2中间通孔内安装一个滑动轴承11,滑动轴承套装在攀爬杆1上,在攀爬杆1导向下上下移动,拉簧8的两端分别与斜夹板4和双联滚柱9的细圆柱相连,通过两个连接螺栓6把两个斜夹板4连接,脚蹬连杆5固结在上支撑板2上,脚蹬7固结在脚蹬连杆5上。
5.本实用新型的有益效果是:一种超越离合爬杆载体作为一种爬杆运送载体,在双脚交替上提和下蹬驱动下能携带相关清洗、检修等设备沿杆向上移动,并可在攀爬到一定高度时进行相关高空作业。
附图说明
6.图1是超越离合爬杆载体三维图;
7.图2是超越离合爬杆载体三维局部图一;
8.图3是超越离合爬杆载体三维局部图二;
9.图4是超越离合爬杆载体三维局部图三;
10.图5是斜夹板三维图;
11.图6是斜夹板正视图;
12.图7是脚蹬。
13.其中,
14.1.攀爬杆,2.上支撑板,3.转动销,4.斜夹板,5.脚蹬连杆,6.连接螺栓,7.脚蹬,8.拉簧,9.双联滚柱,10.斜槽,11.滑动轴承
具体实施方式
15.如图1—图7,当上超越离合装置或下超越离合装置相对于攀爬杆1向下移动或有向下移动的趋势时,由于攀爬杆1和双联滚柱9之间的摩擦力,会使双联滚柱9钻向由斜夹板4内的斜槽10和攀爬杆1形成的楔形空间,空间越来越小,斜槽10与攀爬杆1把两双联滚柱9夹的越来越紧,直至双联滚柱9被卡死,即整套装置的重力与锁紧力(双联滚柱9在斜槽10和攀爬杆1由夹紧力产生的摩擦力)平衡,故上超越离合装置或下超越离合装置不能向下滑;当上超越离合装置或下超越离合装置相对于攀爬杆1向上移动或有向上移动的趋势时,斜夹板4向上移动,双联滚柱9在和攀爬杆1摩擦力作用下钻向斜夹板4的斜槽10内的较大的楔形空间,楔形空间越来越大双联滚柱9便和攀爬杆1和斜夹板4瞬间脱离而自转打滑,从而实现自动解锁功能,即当上超越离合装置或下超越离合装置向下移动或有向下移动的趋势时便自动卡死在攀爬杆1,当上超越离合装置或下超越离合装置向上移动或有向上移动的趋势时便自动解锁,可在攀爬杆1向上滑动。当使用者需要借助该装置向上攀爬时,首先双脚分别穿站在两个脚蹬7上,手握抱握在攀爬杆1上,通过双脚交替上提和下蹬脚蹬7,上超越离合装置和下超越离合装置交替的卡死和向上滑动,在双手抱握攀爬杆1的配合下人体慢慢上爬,在上爬过程中能携带相关清洗、检修等设备沿杆向上移动,并可在攀爬到一定高度时进行相关高空作业。
技术特征:
1.一种超越离合爬杆载体,其本体由上超越离合装置、下超越离合装置和攀爬杆组成,其特征是所述的上超越离合装置和下超越离合装置结构相同,每个超越离合装置由1个上支撑板、两个对称布置的转动销、两个对称布置的斜夹板、1个脚蹬连杆、两个对称布置的连接螺栓、1个脚蹬、两个对称布置的拉簧和两个对称布置的双联滚柱组成,所述的双联滚柱中间为一段细圆柱,两端为两个尺寸一样的粗滚柱,所述的斜夹板内表面有一个斜槽,双联滚柱两端粗滚柱端面和斜夹板的斜槽的两侧内表面组成大间隙配合,双联滚柱的粗滚柱的滚动面在拉簧拉力作用下紧贴在攀爬杆和斜槽的斜面上,所述的两个对称布置的斜夹板通过2个转动销和上支撑板组成转动副,所述的上支撑板中间通孔内安装一个滑动轴承,滑动轴承套装在攀爬杆上,在攀爬杆导向下上下移动,拉簧的两端分别与斜夹板和双联滚柱的细圆柱相连,通过两个连接螺栓把两个斜夹板连接,脚蹬连杆固结在上支撑板上,脚蹬固结在脚蹬连杆上。
技术总结
本实用新型涉及一种超越离合爬杆载体,其本体由上超越离合装置、下超越离合装置和攀爬杆组成,其特征是所述的上超越离合装置和下超越离合装置结构相同,每个超越离合装置主要由1个上支撑板、两个对称布置的转动销、两个对称布置的斜夹板、1个脚蹬连杆、两个对称布置的连接螺栓、1个脚蹬、两个对称布置的拉簧和两个对称布置的双联滚柱组成,该装置在双脚交替上提和下蹬驱动下能携带相关清洗、检修等设备沿杆向上移动,并可在攀爬到一定高度时进行相关高空作业。空作业。空作业。
技术研发人员:朱志强 熊艳红 李志 胡家伟 张言 赵令 曾志强 钱明宇 李天成 朱子恒 黄帅 王冲 陈虎 杨禄桥 江俊飞
受保护的技术使用者:湖北职业技术学院
技术研发日:2021.08.31
技术公布日:2022/2/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1