一种智能篮球场划线装置
1.本实用新型涉及划线设备技术领域,具体涉及一种智能篮球场划线装置。
背景技术:
2.篮球比赛场地是一个长方形的坚实平面,篮球场地长28米,宽15米,无障碍物。篮球场地有土质、水泥、沥青和木质等。现在的篮球比赛场塑胶地面的使用较多。土质、水泥和沥青场地比较经济,大学、基层单位使用较多,但要注意地面平整,以防出现伤害事故,在篮球场地建造中需要进行画线。
3.现有的画线装置在使用时,需要人工推着划线车进行划线,人工划线存在精确度低,且费时费力的情况。同时,现有的篮球场界线在白天的时候能被清晰的看到,但是到了晚上,受光线影响,篮球场的界线就会看不清楚,导致人们无法很好的进行该项运动。
技术实现要素:
4.针对上述的技术问题,本技术方案提供了一种智能篮球场划线装置,可有效的解决上述问题。
5.本实用新型通过以下技术方案实现:
6.一种智能篮球场划线装置,包括外壳壳体,外壳壳体的底部安装有滚轮,所述的滚轮包括主动轮和从动轮,主动轮的传动轴与电机的输出轴传动连接;所述外壳壳体的中部设置有荧光粉盒,荧光粉盒安装在外壳壳体内,其顶部与外壳壳体的顶部平齐,其底部与外壳壳体的底部平齐;所述荧光粉盒的顶部和底部分别设置有荧光粉盒入料口和荧光粉盒出料口,入料口和出料口的位置处分别安装有可打开或关闭的滑盖;在外壳壳体的内部,位于荧光粉盒的一侧固定安装有控制器,所述的控制器通过驱动电路与电机连接;位于外壳壳体的前端安装有超声波发射器和超声波接收器,超声波发射器和超声波接收器通过控制电路与控制器连接。
7.进一步的,所述的荧光粉盒内设置有荧光粉流量监测器,荧光粉流量监测器采用的是yf-s201液体流量计,yf-s201液体流量计通过信号线与控制器信号连接,用于实时监测荧光粉盒内荧光粉液体的量;所述的yf-s201液体流量计在监测时,通过传感器发出的脉冲信号计算流出的体积,流出1升液体需要450个脉冲信号。
8.进一步的,所述的控制器连接有轨迹运动设定模块,所述的轨迹运动设定模块采用的是9轴运动传感器,9轴运动传感器通过信号线与控制器信号连接。
9.进一步的,所述的电机驱动电路采用的是2路双h桥电机驱动模块,2路双h桥电机驱动模块通过电路与控制器连接,接收控制器的控制信号;2路双h桥电机驱动模块的输出端与电机连接,驱动直流电机,带动小车行走。
10.进一步的,所述的超声波发射器和超声波接收器通过超声波感应避障电路与控制器连接,超声波感应避障电路中包括微控制stc11sop14,所述的微控制stc11sop14与信号发射器max232idr和信号接收器tl074sop14连接,微控制器stc11sop14给信号发射器
max232idr一个电信号,信号发射器max232idr发射8个40khz左右的方波,方波遇到障碍物之后反射回来,由信号接收器tl074sop14接收信号,然后反馈给微控制stc11sop14,可以以此来判断前方是否有障碍物;如果没有障碍物,信号接收器tl074sop14接收不到信号;如果有障碍物,微控制stc11sop14计算发射和接收的时间差,通过已知的波速可以计算出超声波行走的距离,从而计算得到障碍物的距离;小车作出正能反映,停止、转向、警报灯动作,实现智能化避障。
11.进一步的,所述外壳壳体的顶部,位于控制器的上侧设置有开机按键,关机按键和选择按键,所述的按键通过信号线与控制器连接。
12.进一步的,所述的控制器信号连接有4g定位及通信模块电路,所述的4g定位及通信模块电路采用的是型号为ec20的定位模块,其输入端和输出端与控制器的pa端连接,进行信号传输。
13.进一步的,所述外壳壳体的顶部设置有显示屏,所述的显示屏通过电路与控制器连接;所述的控制器还连接有时钟电路、报警电路、sd卡存储电路和电压转换电路。
14.进一步的,所述外壳壳体上设置有散热孔。
15.有益效果
16.本实用新型提出的一种智能篮球场划线装置,与现有技术相比较,其具有以下有益效果:
17.(1)本技术方案通过控制器控制智能小车进行篮球场划线,取代人工,降低了劳动成本。同时,通过设置在外壳壳体内部的荧光粉盒,利用荧光粉液体进行绘制篮球场的界线,使得篮球场的界线即使在昏暗的光线下也有反光的作用,可以显示的很清晰。
18.(2)本技术方案通过轨迹运动设定模块中的9轴运动传感器,以及配合控制器中给出在x\y轴上的距离和速度,来实现小车智能自动的运动,小车可以在预先设定好路线,从起始点在x轴上的运动情况和在y轴上的运动情况。同时可以配合4g定位及通信模块,具有高精度定位和通信功能,可以辅助定位轨迹运行或者做纠正,或者通过定位坐标实行数据提前规划控制。
19.(3)本技术方案通过设置的超声波发射器和超声波接收器测试是否有障碍物,若有障碍物,可以计算出距离;使得小车配合报警电路和电机驱动电路作出正能反映,停止、转向、警报等动作,实现智能化避障。
附图说明
20.图1是本实用新型的主视图。
21.图2是本实用新型的左视图。
22.图3是本实用新型的仰视图。
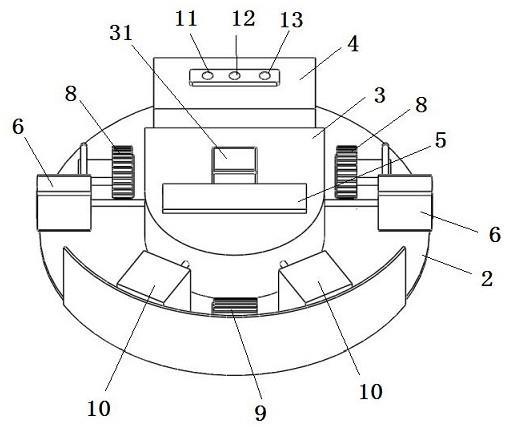
23.图4是本实用新型的俯视图。
24.图5是本实用新型的去掉盖板后的内部结构图。
25.图6是本实用新型的主控电路示意图。
26.图7是本实用新型的电机驱动电路示意图。
27.图8是本实用新型的流量监测仪电路示意图。
28.图9是本实用新型的轨迹运动设定模块电路示意图。
29.图10是本实用新型的4g定位及通信模块电路示意图。
30.图11是本实用新型的超声波发射器和波接收器电路示意图。
31.图12是本实用新型的按键电路示意图。
32.图13是本实用新型的时钟电路示意图。
33.图14是本实用新型的报警电路示意图。
34.图15是本实用新型的sd卡存储电路示意图。
35.图16是本实用新型的电压转换电路示意图。
36.附图中的标志:1-上盖、2-底座、21-散热孔、3-荧光粉盒、31-荧光粉盒入料口、32-荧光液出口、4-控制器、5-显示屏、6-电机、7-4g通信模块、8-主动轮、9-从动轮、10-超声波发射器和超声波接收器、11-开机按钮、12-选择按钮、13-关机按钮。
具体实施方式
37.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。在不脱离本实用新型设计构思的前提下,本领域普通人员对本实用新型的技术方案做出的各种变型和改进,均应落入到本实用新型的保护范围。
38.实施例1:
39.如图1-5所示,一种智能篮球场划线装置,包括外壳壳体,外壳壳体上设置有散热孔21。所述的外壳壳体包括上盖1和底座2;所述的底座2上安装有滚轮,所述的滚轮包括主动轮8和从动轮9,主动轮8的传动轴与电机6的输出轴传动连接;电机6通过驱动电路与控制器4连接。
40.所述外壳壳体的中部设置有荧光粉盒3,荧光粉盒3安装在外壳壳体内,其顶部与外壳壳体的顶部平齐,其底部与外壳壳体的底部平齐;所述荧光粉盒3的顶部和底部分别设置有荧光粉盒入料口31和荧光粉盒出料口32,入料口31和出料口32的位置处分别安装有可打开或关闭的滑盖。
41.在外壳壳体的内部,位于荧光粉盒3的一侧固定安装有控制器4,位于位于控制器4的上侧,在外壳壳体的顶部设置有开机按键11,关机按键13和选择按键12,所述的开机按键11,关机按键13和选择按键12通过信号线与控制器4连接。
42.位于外壳壳体的前端安装有与控制器4连接的超声波发射器和超声波接收器10,超声波发射器和超声波接收器10通过控制电路与控制器4连接。
43.所述外壳壳体的顶部设置有显示屏5,所述的显示屏5通过电路与控制器4连接。
44.如图6所示,所述的控制器采用的型号为stm32f103c8t6的主控芯片,所述的指控芯片设置有复位电路和mcu晶振电路。
45.在控制器中植入一种智能篮球场划线系统,所述的划线系统可采用专利号为2019111549922 公开的一种智能篮球场划线方法及系统。该方法和系统只是本实施例的一种实施方式,也可采用其他的篮球场划线方法及系统作为实施方式。
46.如图7所示,所述的电机驱动电路采用的是2路双h桥电机驱动模块,2路双h桥电机驱动模块通过接口j1和接口j2进行对接,接口j1与控制器连接,接收控制器的控制信号;2路双h桥电机驱动模块的输出端与电机连接,驱动直流电机,带动小车行走。
47.如图8所示,所述的荧光粉盒内设置有荧光粉流量监测器,荧光粉流量监测器采用的是yf-s201液体流量计,yf-s201液体流量计通过信号线与控制器信号连接,其输出端与控制器连接,用于实时监测荧光粉盒内荧光粉液体的量;所述的yf-s201液体流量计在监测时,通过传感器发出的脉冲信号计算流出的体积,流出1升液体需要450个脉冲信号。
48.如图9所示,所述的控制器连接有轨迹运动设定模块,所述的轨迹运动设定模块采用的是型号为mpu-9250的9轴运动传感器,mpu-9250的9轴运动传感器通过信号线与控制器信号连接。
49.通过轨迹运动设定模块中的9轴运动传感器,以及配合控制器中给出在x\y轴上的距离和速度,来实现小车智能自动的运动,小车可以在预先设定好路线,从起始点在x轴上的运动情况和在y轴上的运动情况。
50.如图10所示,所述的控制器信号连接有4g定位及通信模块电路,所述的4g定位及通信模块电路采用的是型号为ec20的定位模块,其输入端和输出端与控制器的pa端连接,进行信号传输。所述的ec20的定位模块具有高精度定位和通信功能,可以辅助定位轨迹运行或者做纠正,或者通过定位坐标实行数据提前规划控制。
51.如图11所示,所述的超声波发射器和超声波接收器通过超声波感应避障电路与控制器连接,超声波感应避障电路中包括微控制stc11sop14,所述的微控制stc11sop14与信号发射器max232idr和信号接收器tl074sop14连接,微控制器stc11sop14给信号发射器max232idr一个电信号,信号发射器max232idr发射8个40khz左右的方波,方波遇到障碍物之后反射回来,由信号接收器tl074sop14接收信号,然后反馈给微控制stc11sop14,可以以此来判断前方是否有障碍物;如果没有障碍物,信号接收器tl074sop14接收不到信号;如果有障碍物,微控制stc11sop14计算发射和接收的时间差,通过已知的波速可以计算出超声波行走的距离,从而计算得到障碍物的距离;小车作出正能反映,停止、转向、警报灯动作,实现智能化避障。
52.如图12所示,所述的按键电路中包括分别与开机按键、关机按键和选择按键对应的key1、key2和key3,所述的按键分别与控制器电路连接。
53.如图13所示,所述的控制器连接有时钟电路,所述的时钟电路采用的是ds1302时钟芯片,主要是用于显示日期和时间,或者做定时使用。
54.如图14所示,所述的控制器连接有报警电路,报警电路包括蜂鸣器,所述的蜂鸣器通过信号线与控制器的输出端连额吉。
55.如图15所示,所述的控制器连接有sd卡存储电路,sd卡存储电路采用sd1的sd card电路。通过电路与控制器连接。
56.如图16所示,所述的电源通过电压转换电路后与电路中的用电设备连接,电压转换电路围绕型号为ams1117-1.2_c475600的电压转换芯片展开,将电压转换为5v和3.3v电压后进行输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1