一种触摸感应方式的智能跳绳的制作方法
1.本发明涉及跳绳领域,具体涉及一种触摸感应方式的智能跳绳。
背景技术:
2.市面上绝大部分的智能跳绳的都有一个至多个实体按键,实体按键和壳体之间会有缝隙,即使组装工艺做的很好,也无法避免使用者运动汗液较多的时候,汗液通过此缝隙流入到智能跳绳内部使得电路板发生短路情况,损坏智能跳绳内部电路板,导致智能跳绳设备损坏。
技术实现要素:
3.为了解决使用者汗液通过按键和壳体缝隙流入内部电路板,损坏电路板的问题,本发明提供一种触摸感应方式的智能跳绳,可以防止使用者汗液通过按键和壳体缝隙流入内部电路板,从而减小设备的损坏概率。
4.为了实现上述目的,本发明提供了一种触摸感应方式的智能跳绳,包括:握持部,握持部形成有容纳空间并包括第一握持部和第二握持部;连接部,连接部连接握持部;智能跳绳还包括:触摸感应模块,触摸感应模块至少部分设置在容纳空间中;触摸感应模块包括:模块支架,用于设置电子器件;控制单元,控制单元至少部分设置在模块支架上,用于控制智能跳绳;传输单元,传输单元连接至控制单元,用于传递感应信号至控制单元;感应单元,感应单元连接至传输单元,感应单元至少部分设置在握持部内壁上且不与外界直接接触,用于生成感应信号。
5.进一步地,第一握持部形成有第一容纳空间;第二握持部形成有第二容纳空间;第一容纳空间或第二容纳空间中至少之一设置有触摸感应模块。
6.进一步地,第一握持部上设置有:轴头,轴头用于连接第一握持部和连接部;轴头上设置有磁性件;第一容纳空间中设置有:霍尔模块,霍尔模块包括第一霍尔传感器和第二霍尔传感器;第一霍尔传感器和第二霍尔传感器关于轴头的轴线基本对称设置;磁性件设置在第一霍尔传感器和第二霍尔传感器之间。
7.进一步地,第二握持部上设置有:轴头,轴头用于连接第二握持部和连接部;轴头上设置有磁性件;第二容纳空间中设置有:霍尔模块,霍尔模块包括第一霍尔传感器和第二霍尔传感器;第一霍尔传感器和第二霍尔传感器关于轴头的轴线基本对称设置;磁性件设置在第一霍尔传感器和第二霍尔传感器之间。
8.进一步地,握持部包括:握持模块;安装模块,安装模块连接握持模块并形成有第三容纳空间;触摸感应模块的至少部分设于第三容纳空间中。
9.进一步地,安装模块上设置有:轴头,轴头用于连接安装模块和连接部;轴头上设置有磁性件;第三容纳空间中设置有:霍尔模块,霍尔模块包括第一霍尔传感器和第二霍尔传感器;第一霍尔传感器和第二霍尔传感器关于轴头的轴线基本对称设置;磁性件设置在第一霍尔传感器和第二霍尔传感器之间。
10.进一步地,传输单元包括:输入电容,用于输出电容值至控制单元,输入电容与感应单元电连接。
11.进一步地,智能跳绳还包括:无线模块,无线模块至少部分设置在模块支架上且连接控制单元;显示模块,显示模块连接控制模块且至少部分设置在握持部外表面;显示模块至少部分设置在握持部中且与握持部密封连接。
12.进一步地,握持部上设置有:第一安装槽,第一安装槽至少部分设置在容纳空间中且连通外界;显示模块至少部分设置在第一安装槽中。
13.进一步地,轴头上设置有第二安装槽,磁性件设置在第二安装槽中。
14.与现有技术相比,本发明至少具有以下有益效果:
15.感应单元、握持部和传输单元形成组合件,将人体生物电流转换成感应信号传递至控制单元,即控制单元会得到一个基本固定的电容值,可以防止使用者汗液通过按键和壳体缝隙流入内部电路板,从而减小设备的损坏概率。
附图说明
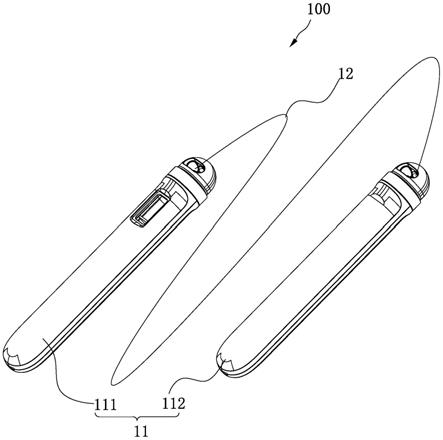
16.图1是本发明一种实现方式中智能跳绳的结构示意图。
17.图2是本发明第一种实现方式中握持部的内部结构示意图。
18.图3是本发明第一种实现方式中握持部与轴头的结构示意图。
19.图4是本发明第二种实现方式中握持部的内部结构示意图。
20.图5是本发明第二种实现方式中握持部与轴头的结构示意图。
21.图6是本发明第三种实现方式中握持部的内部结构示意图。
22.图7是本发明第三种实现方式中握持部与轴头的结构示意图。
23.图8是本发明第四种实现方式中握持部的内部结构示意图。
24.图9是本发明第五种实现方式中握持部的内部结构示意图
25.图10是本发明第五种实现方式中安装模块的内部结构示意图。
26.图11是本发明第五种实现方式中握持部与轴头的结构示意图。
具体实施方式
27.为了使本领域的人员更好地理解本发明方案,下面将结合本发明实施方式中的附图,对本发明具体实施方式中的技术方案进行清楚、完整地描述。
28.如图1所示,智能跳绳100包括握持部11和连接部12。连接部12连接至握持部11。握持部11用于提供握持的位置。连接部12用于连接握持部11,从而用于与握持部11构成智能跳绳100。具体的,握持部11包括第一握持部111和第二握持部112,连接部12连接第一握持部111和第二握持部112,从而使第一握持部111、第二握持部112和连接部12构成智能跳绳100。
29.如图2所示,作为一种实现方式,握持部11形成有容纳空间113,容纳空间113中设有至少部分触摸感应模块13。触摸感应模块13包括模块支架131、控制单元132、传输单元133和感应单元134。模块支架131可以为电路板,用于设置各种电子器件。控制单元132至少部分设置在模块支架131上,传输单元133至少部分设置在模块支架131上。感应单元134连接传输单元133,传输单元133连接控制单元132。其中,感应单元134至少部分设置在握持部
11内壁上且不与外界直接接触,可以是触摸感应金属片等,用于与使用者皮肤接触,传导人体生物电流,并将人体生物电流转换成感应信号传递至传输单元133,便于使用者通过感应单元134控制智能跳绳100。传输单元133包括输入电容1331和导线1332。导线1332连接输入电容1331和感应单元134,用于将感应单元134传递的感应信号传递至输入电容1331。输入电容1331至少部分设置在模块支架131上,且连接控制单元132,用于将感应信号传递至控制单元132,便于使用者控制智能跳绳100。控制单元132可以是控制芯片等,用于接收输入电容1331传递的感应信号,从而实现控制智能跳绳100的目的。具体的,感应单元134、握持部11和传输单元133形成组合件,将人体生物电流转换成感应信号传递至控制单元132,即控制单元132会得到一个基本固定的电容值。其中,电容值指将人体生物电流转换成感应信号传递至输入电容1331,输入电容1331根据感应信号产生的电容值。当使用者手指触摸设置有感应单元134的握持部11时,控制单元132会感应到电容值的变化,并以电容变化的时间来确认使用者是短按或长按。当感应单元134为触摸感应金属片时,触摸感应金属片设计为直径1mm、厚0.1mm的金属薄片,触摸感应金属片设置在握持部11的内部,位置可以根据使用者需求进行调整,只需要避开使用者接触握持部11的区域即可。输入电容1331根据握持部11的厚度增加而增加,以此来调整触摸感应的灵敏度,适应不同厚度的握持部11。
30.如图3所示,作为一种实现方式,握持部11上设有轴头114,轴头114连接握持部11和连接部12(参照图1)。轴头114第一端设置在容纳空间113中,轴头114第二端连接连接部12。其中轴头114第一端为转轴1141,转轴1141转动连接在握持部11上。转轴1141一端连接轴头114,转轴1141远离轴头114一端转动连接在握持部11上,转轴1141远离轴头114一端上设有磁性件1142。磁性件1142的磁感应强度可以根据需求调整,磁性件1142可以是磁铁。容纳空间113中还设有霍尔模块14,霍尔模块14包括第一霍尔传感器141和第二霍尔传感器142,第一霍尔传感器141连接控制单元132且至少部分设置在握持部11内壁上,第二霍尔传感器142连接控制单元132且至少部分设置在握持部11内壁上。第一霍尔传感器141和第二霍尔传感器142关于转轴1141的轴线基本对称设置,且设置于转轴1141两侧。磁性件1142设于第一霍尔传感器141和第二霍尔传感器142之间且设置于转轴1141内部。具体的,磁性件1142设置在转轴1141轴线的一侧。转轴1141远离轴头114一端的端面上设有第一安装槽1143,磁性件1142设置在第一安装槽1143中。磁性件1142设置在第一安装槽1143中的方式可以是通过胶水胶接,也可以通过过盈配合固定,只要满足磁性件1142可以固定设置在第一安装槽1143中即可。
31.在本实施方式中,第一霍尔传感器141和第二霍尔传感器142为各向异性磁阻(anisotropic magneto resistance,amr)和数字电路集成化后的一款磁场检测传感器,即amr霍尔传感器。amr霍尔传感器无需磁性件1142特定的n或s极接近即可进行检测,只需要磁性件1142产生的磁场强度大于amr霍尔传感器的最小检测精度即可检测到是否有磁性件1142到达amr霍尔传感器附近。作为一种实现方式,第一霍尔传感器141感应到磁场强度发生变化后,第一霍尔传感器141内部集成的数字电路产生第一下降沿信号;第二霍尔传感器142感应到磁场强度发生变化后,第二霍尔传感器142内部集成的数字电路产生第二下降沿信号。当使用者跳绳时,连接部12带动轴头114转动,此时磁性件1142围绕轴头114中心做360度旋转,每旋转一圈,第一霍尔传感器141检测到磁性件1142所产生的磁场并输出第一下降沿信号,第二霍尔传感器142检测到磁性件1142所产生的磁场并输出第二下降沿信号。
控制单元132通过检测第一霍尔传感器141的第一下降沿信号和第二霍尔传感器142的第二下降沿信号数量即可计算出轴头114的旋转圈数,轴头114每旋转一圈,等同于用户跳绳一次。具体的,轴头114旋转一圈为控制单元132依次接收到第一下降沿信号、第二下降沿信号和第一下降沿信号,或控制单元132依次接收到第二下降沿信号、第一下降沿信号和第二下降沿信号,即控制单元132接收到两次第一下降沿信号和一次第二下降沿信号,或控制单元132接收到两次第二下降沿信号和一次第一下降沿信号,从而实现精准计算跳绳个数。
32.如图2所示,作为一种实现方式,容纳空间113中还设有无线模块15和至少部分显示模块16。无线模块15至少部分设置在模块支架131上,且连接控制单元132。无线模块15可以为蓝牙模块、4g模块、lora模块等无线传输模块,用于将运动数据传输至使用者绑定的app等平台中,帮助使用者分析跳绳运动数据。显示模块16至少部分设置在容纳空间113中,且至少部分设置在握持部11外表面,便于使用者查看跳绳个数、跳绳时间等跳绳状态数据。显示模块16连接控制单元132,便于控制单元132将跳绳状态数据传递至显示模块16,从而实现显示模块16的显示数据功能。具体的,握持部11外表面上设置有第二安装槽115,第二安装槽115连通外界和容纳空间113。显示模块16至少部分设置在第二安装槽115中,显示模块16连接第二安装槽115。在本实施方式中,显示模块16与第二安装槽115的连接为密封连接,通过密封连接,可以有效地防止液体和尘埃等进入容纳空间113中,从而避免容纳空间113的电子元器件受到损坏。
33.如图4所示,作为一种实施方式,第一握持部111形成有第一容纳空间1111,第一容纳空间1111中设有至少部分触摸感应模块13。触摸感应模块13包括模块支架131、控制单元132、传输单元133和感应单元134。模块支架131可以为电路板,用于设置各种电子器件。控制单元132至少部分设置在模块支架131上,传输单元133至少部分设置在模块支架131上。感应单元134连接传输单元133,传输单元133连接控制单元132。其中,感应单元134至少部分设置在第一握持部111内壁上,可以是触摸感应金属片等,用于与使用者皮肤接触,传导人体生物电流,并将人体生物电流转换成感应信号传递至传输单元133,便于使用者通过感应单元134控制智能跳绳100。传输单元133包括输入电容1331和导线1332。导线1332连接输入电容1331和感应单元134,用于将感应单元134传递的感应信号传递至输入电容1331。输入电容1331至少部分设置在模块支架131上,且连接控制单元132,用于将感应信号传递至控制单元132,便于使用者控制智能跳绳100。控制单元132可以是控制芯片等,用于接收输入电容1331传递的感应信号,从而实现控制智能跳绳100的目的。具体的,感应单元134、第一握持部111和传输单元133形成组合件,将人体生物电流转换成感应信号传递至控制单元132,即控制单元132会得到一个基本固定的电容值。其中,电容值指将人体生物电流转换成感应信号传递至输入电容1331,输入电容1331根据感应信号产生的电容值。当使用者手指触摸设置有感应单元134的第一握持部111时,控制单元132会感应到电容值的变化,并以电容变化的时间来确认使用者是短按或长按。当感应单元134为触摸感应金属片时,触摸感应金属片设计为直径1mm、厚0.1mm的金属薄片,触摸感应金属片设置在第一握持部111的内部,位置可以根据使用者需求进行调整,只需要避开使用者接触第一握持部111的区域即可。输入电容1331根据第一握持部111的厚度增加而增加,以此来调整触摸感应的灵敏度,适应不同厚度的第一握持部111。
34.如图5所示,作为一种实现方式,第一握持部111上设有轴头114,轴头114连接第一
握持部111和连接部12。轴头114第一端设置在第一容纳空间1111中,轴头114第二端连接连接部12。其中轴头114第一端为转轴1141,转轴1141转动连接在第一握持部111上。转轴1141一端连接轴头114,转轴1141远离轴头114一端转动连接在第一握持部111上,转轴1141远离轴头114一端上设有磁性件1142。磁性件1142的磁感应强度可以根据需求调整。第一容纳空间1111中还设有霍尔模块14,霍尔模块14包括第一霍尔传感器141和第二霍尔传感器142,第一霍尔传感器141连接控制单元132且至少部分设置在第一握持部111内壁上,第二霍尔传感器142连接控制单元132且至少部分设置在第一握持部111内壁上。第一霍尔传感器141和第二霍尔传感器142关于转轴1141的轴线基本对称设置,且设置于转轴1141两侧。磁性件1142设于第一霍尔传感器141和第二霍尔传感器142之间且设置于转轴1141内部。具体的,磁性件1142设置在转轴1141轴线的一侧。转轴1141远离轴头114一端的端面上设有第一安装槽1143,磁性件1142设置在第一安装槽1143中。磁性件1142设置在第一安装槽1143中的方式可以是通过胶水胶接,也可以通过过盈配合固定,只要满足磁性件1142可以固定设置在第一安装槽1143中即可。
35.如图4所示,作为一种实现方式,第一容纳空间1111中还设有无线模块15和至少部分显示模块16。无线模块15至少部分设置在模块支架131上,且连接控制单元132。无线模块15可以为蓝牙模块、4g模块、lora模块等无线传输模块,用于将运动数据传输至使用者绑定的app等平台中,帮助使用者分析跳绳运动数据。显示模块16至少部分设置在第一容纳空间1111中,且至少部分设置在第一握持部111外表面,便于使用者查看跳绳个数、跳绳时间等跳绳状态数据。显示模块16连接控制单元132,便于控制单元132将跳绳状态数据传递至显示模块16,从而实现显示模块16的显示数据功能。具体的,第一握持部111外表面上设置有第二安装槽115,第二安装槽115连通外界和第一容纳空间1111。显示模块16至少部分设置在第二安装槽115中,显示模块16连接第二安装槽115。在本实施方式中,显示模块16与第二安装槽115的连接为密封连接,通过密封连接,可以有效地防止液体和尘埃等进入第一容纳空间1111中,从而避免第一容纳空间1111的电子元器件受到损坏。
36.如图6所示,作为一种实施方式,第二握持部112形成有第二容纳空间1121,第二容纳空间1121中设有至少部分触摸感应模块13。触摸感应模块13包括模块支架131、控制单元132、传输单元133和感应单元134。模块支架131可以为电路板,用于设置各种电子器件。控制单元132至少部分设置在模块支架131上,传输单元133至少部分设置在模块支架131上。感应单元134连接传输单元133,传输单元133连接控制单元132。其中,感应单元134至少部分设置在第二握持部112内壁上,可以是触摸感应金属片等,用于与使用者皮肤接触,传导人体生物电流,并将人体生物电流转换成感应信号传递至传输单元133,便于使用者通过感应单元134控制智能跳绳100。传输单元133包括输入电容1331和导线1332。导线1332连接输入电容1331和感应单元134,用于将感应单元134传递的感应信号传递至输入电容1331。输入电容1331至少部分设置在模块支架131上,且连接控制单元132,用于将感应信号传递至控制单元132,便于使用者控制智能跳绳100。控制单元132可以是控制芯片等,用于接收输入电容1331传递的感应信号,从而实现控制智能跳绳100的目的。具体的,感应单元134、第二握持部112和传输单元133形成组合件,将人体生物电流转换成感应信号传递至控制单元132,即控制单元132会得到一个基本固定的电容值。其中,电容值指将人体生物电流转换成感应信号传递至输入电容1331,输入电容1331根据感应信号产生的电容值。当使用者手指
触摸设置有感应单元134的第二握持部112时,控制单元132会感应到电容值的变化,并以电容变化的时间来确认使用者是短按或长按。当感应单元134为触摸感应金属片时,触摸感应金属片设计为直径1mm、厚0.1mm的金属薄片,触摸感应金属片设置在第二握持部112的内部,位置可以根据使用者需求进行调整,只需要避开使用者接触第二握持部112的区域即可。输入电容1331根据第二握持部112的厚度增加而增加,以此来调整触摸感应的灵敏度,适应不同厚度的第二握持部112。
37.如图7所示,作为一种实现方式,第二握持部112上设有轴头114,轴头114连接第二握持部112和连接部12。轴头114第一端设置在第二容纳空间1121中,轴头114第二端连接连接部12。其中轴头114第一端为转轴1141,转轴1141转动连接在第二握持部112上。转轴1141一端连接轴头114,转轴1141远离轴头114一端转动连接在第二握持部112上,转轴1141远离轴头114一端上设有磁性件1142。磁性件1142的磁感应强度可以根据需求调整。第二容纳空间1121中还设有霍尔模块14,霍尔模块14包括第一霍尔传感器141和第二霍尔传感器142,第一霍尔传感器141连接控制单元132且至少部分设置在第二握持部112内壁上,第二霍尔传感器142连接控制单元132且至少部分设置在第二握持部112内壁上。第一霍尔传感器141和第二霍尔传感器142关于转轴1141的轴线基本对称设置,且设置于转轴1141两侧。磁性件1142设于第一霍尔传感器141和第二霍尔传感器142之间且设置于转轴1141内部。具体的,磁性件1142设置在转轴1141轴线的一侧。转轴1141远离轴头114一端的端面上设有第一安装槽1143,磁性件1142设置在第一安装槽1143中。磁性件1142设置在第一安装槽1143中的方式可以是通过胶水胶接,也可以通过过盈配合固定,只要满足磁性件1142可以固定设置在第一安装槽1143中即可。
38.如图6所示,作为一种实现方式,第二容纳空间1121中还设有无线模块15和至少部分显示模块16。无线模块15至少部分设置在模块支架131上,且连接控制单元132。无线模块15可以为蓝牙模块、4g模块、lora模块等无线传输模块,用于将运动数据传输至使用者绑定的app等平台中,帮助使用者分析跳绳运动数据。显示模块16至少部分设置在第二容纳空间1121中,且至少部分设置在第二握持部112外表面,便于使用者查看跳绳个数、跳绳时间等跳绳状态数据。显示模块16连接控制单元132,便于控制单元132将跳绳状态数据传递至显示模块16,从而实现显示模块16的显示数据功能。具体的,第二握持部112外表面上设置有第二安装槽115,第二安装槽115连通外界和第二容纳空间1121。显示模块16至少部分设置在第二安装槽115中,显示模块16连接第二安装槽115。在本实施方式中,显示模块16与第二安装槽115的连接为密封连接,通过密封连接,可以有效地防止液体和尘埃等进入第二容纳空间1121中,从而避免第二容纳空间1121的电子元器件受到损坏。
39.如图8所示,作为一种实施方式,第一握持部111形成有第一容纳空间1111,第一容纳空间1111中设有至少部分第一触摸感应模块1112,第二握持部112形成有第二容纳空间1121,第二容纳空间1121中设有至少部分第二触摸感应模块。第一触摸感应模块1112包括模块支架131、控制单元132、传输单元133和感应单元134。模块支架131可以为电路板,用于设置各种电子器件。控制单元132至少部分设置在模块支架131上,传输单元133至少部分设置在模块支架131上。感应单元134连接传输单元133,传输单元133连接控制单元132。其中,感应单元134至少部分设置在第一握持部111内壁上,可以是触摸感应金属片等,用于与使用者皮肤接触,传导人体生物电流,并将人体生物电流转换成感应信号传递至传输单元
133,便于使用者通过感应单元134控制智能跳绳100。传输单元133包括输入电容1331和导线1332。导线1332连接输入电容1331和感应单元134,用于将感应单元134传递的感应信号传递至输入电容1331。输入电容1331至少部分设置在模块支架131上,且连接控制单元132,用于将感应信号传递至控制单元132,便于使用者控制智能跳绳100。控制单元132可以是控制芯片等,用于接收输入电容1331传递的感应信号,从而实现控制智能跳绳100的目的。具体的,感应单元134、第一握持部111和传输单元133形成组合件,将人体生物电流转换成感应信号传递至控制单元132,即控制单元132会得到一个基本固定的电容值。其中,电容值指将人体生物电流转换成感应信号传递至输入电容1331,输入电容1331根据感应信号产生的电容值。当使用者手指触摸设置有感应单元134的第一握持部111时,控制单元132会感应到电容值的变化,并以电容变化的时间来确认使用者是短按或长按。当感应单元134为触摸感应金属片时,触摸感应金属片设计为直径1mm、厚0.1mm的金属薄片,触摸感应金属片设置在第一握持部111的内部,位置可以根据使用者需求进行调整,只需要避开使用者接触第一握持部111的区域即可。输入电容1331根据第一握持部111的厚度增加而增加,以此来调整触摸感应的灵敏度,适应不同厚度的第一握持部111。第二触摸感应单元的结构和功能与第一触摸感应单元1112的结构和功能一致,此处不再描述。
40.如图9所示,握持部11可以为分段式结构或者一体式结构。当握持部11为分段式结构时,握持部11包括握持模块116和安装模块117,握持模块116连接安装模块117。具体的,握持模块116一端设有内螺纹,安装模块117第一端设有与安装模块117一体成型的螺栓,握持模块116与安装模块117通过螺纹连接。具体的,握持模块116一端设有与握持模块116一体成型的螺栓,安装模块117第一端设有内螺纹,握持模块116与安装模块117通过螺纹连接。
41.如图10所示,作为一种实施方式,安装模块117形成有第三容纳空间1171,第三容纳空间1171中设有至少部分触摸感应模块13。触摸感应模块13包括模块支架131、控制单元132、传输单元133和感应单元134。模块支架131可以为电路板,用于设置各种电子器件。控制单元132至少部分设置在模块支架131上,传输单元133至少部分设置在模块支架131上。感应单元134连接传输单元133,传输单元133连接控制单元132。其中,感应单元134至少部分设置在安装模块117内壁上,可以是触摸感应金属片等,用于与使用者皮肤接触,传导人体生物电流,并将人体生物电流转换成感应信号传递至传输单元133,便于使用者通过感应单元134控制智能跳绳100。传输单元133包括输入电容1331和导线1332。导线1332连接输入电容1331和感应单元134,用于将感应单元134传递的感应信号传递至输入电容1331。输入电容1331至少部分设置在模块支架131上,且连接控制单元132,用于将感应信号传递至控制单元132,便于使用者控制智能跳绳100。控制单元132可以是控制芯片等,用于接收输入电容1331传递的感应信号,从而实现控制智能跳绳100的目的。具体的,感应单元134、安装模块117和传输单元133形成组合件,将人体生物电流转换成感应信号传递至控制单元132,即控制单元132会得到一个基本固定的电容值。其中,电容值指将人体生物电流转换成感应信号传递至输入电容1331,输入电容1331根据感应信号产生的电容值。当使用者手指触摸设置有感应单元134的安装模块117时,控制单元132会感应到电容值的变化,并以电容变化的时间来确认使用者是短按或长按。当感应单元134为触摸感应金属片时,触摸感应金属片设计为直径1mm、厚0.1mm的金属薄片,触摸感应金属片设置在安装模块117的内部,位置可
以根据使用者需求进行调整,只需要避开使用者接触安装模块117的区域即可。输入电容1331根据安装模块117的厚度增加而增加,以此来调整触摸感应的灵敏度,适应不同厚度的安装模块117。
42.如图10和图11所示,作为一种实现方式,安装模块117第一端设有内螺纹或螺栓,安装模块117第二端设有轴头114,轴头114连接安装模块117和连接部12。轴头114第一端设置在第三容纳空间1171中,轴头114第二端连接连接部12。其中轴头114第一端为转轴1141,转轴1141转动连接在安装模块117上。转轴1141一端连接轴头114,转轴1141远离轴头114一端转动连接在安装模块117上,转轴1141远离轴头114一端上设有磁性件1142。磁性件1142的磁感应强度可以根据需求调整。第三容纳空间1171中还设有霍尔模块14,霍尔模块14包括第一霍尔传感器141和第二霍尔传感器142,第一霍尔传感器141连接控制单元132且至少部分设置在安装模块117内壁上,第二霍尔传感器142连接控制单元132且至少部分设置在安装模块117内壁上。第一霍尔传感器141和第二霍尔传感器142关于转轴1141的轴线基本对称设置,且设置于转轴1141两侧。磁性件1142设于第一霍尔传感器141和第二霍尔传感器142之间且设置于转轴1141内部。具体的,磁性件1142设置在转轴1141轴线的一侧。转轴1141远离轴头114一端的端面上设有第一安装槽1143,磁性件1142设置在第一安装槽1143中。磁性件1142设置在第一安装槽1143中的方式可以是通过胶水胶接,也可以通过过盈配合固定,只要满足磁性件1142可以固定设置在第一安装槽1143中即可。
43.如图10所示,作为一种实现方式,第三容纳空间1171中还设有无线模块15和至少部分显示模块16。无线模块15至少部分设置在模块支架131上,且连接控制单元132。无线模块15可以为蓝牙模块、4g模块、lora模块等无线传输模块,用于将运动数据传输至使用者绑定的app等平台中,帮助使用者分析跳绳运动数据。显示模块16至少部分设置在第三容纳空间1171中,且至少部分设置在安装模块117外表面,便于使用者查看跳绳个数、跳绳时间等跳绳状态数据。显示模块16连接控制单元132,便于控制单元132将跳绳状态数据传递至显示模块16,从而实现显示模块16的显示数据功能。具体的,安装模块117外表面上设置有第三安装槽1172,第三安装槽1172连通外界和第三容纳空间1171。显示模块16至少部分设置在第三安装槽1172中,显示模块16连接第三安装槽1172。在本实施方式中,显示模块16与第三安装槽1172的连接为密封连接,通过密封连接,可以有效地防止液体和尘埃等进入第三容纳空间1171中,从而避免第三容纳空间1171的电子元器件受到损坏。
44.应当理解的是,对于本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1