蹬踏式传动系的制作方法
蹬踏式传动系
1.本技术是申请日为2018年12月7日、申请号为201880079356.5(pct/us2018/064582)、发明名称为“用于选择性在旋转方向上固定蹬踏式传动系的系统和方法”的发明专利申请的分案申请。
2.相关申请的交叉引用
3.本技术要求于2017年12月9日提交的题为“systems and methods for selectively rotationally fixing a pedaled drivetrain(用于选择性在旋转方向上固定蹬踏式传动系的系统和方法)”的临时专利申请号62/596,815和于2017年12月22日提交的题为“systems and methods for selectively rotationally fixing apedaled drivetrain(用于选择性在旋转方向上固定蹬踏式传动系的系统和方法)”的临时专利申请号62/609,718的优先权,这些申请对于其所公开的全部内容通过参引并入本文。
技术领域
4.本公开总体上涉及蹬踏式传动系。更具体地,本公开总体上涉及选择性地将蹬踏式传动系从仅沿第一方向传递扭矩改变为沿两个旋转方向传递扭矩。
背景技术:
5.循环运动可以是用于运输和/或运动的非常有效的动力输出,并且用于自行车、三轮车和其他陆基车辆;脚踏船和其他水上交通工具;以及超轻型飞行器、微型飞行器和其他飞行器。类似地,循环运动的生物力学可以对使用者产生较低的冲击,从而降低了关节损伤、骨骼损伤、肌肉损伤或其组合的风险。与比如跑步等其他锻炼相比,循环运动可以避免对身体的反复冲击。因此,循环运动是用于健身和/或康复的常见锻炼技术。例如,椭圆跑步机、固定自行车、手推车和其他循环和/或旋转运动机器可以提供阻力训练或耐力训练而对使用者的身体具有很小的冲击或没有冲击。
6.人力循环系统可以具有用以将来自使用者的能量引导至循环系统的轮、飞轮或其他旋转部件的传动系。传动系可以将来自使用者的能量围绕旋转轴线仅沿一个方向传递至旋转轴线,或者传动系可以将来自使用者的能量围绕旋转轴线沿两个方向传递至旋转轴线。例如,许多常规的自行车在自行车的后部中包括飞轮轮毂,飞轮轮毂可以接收来自传动机构、比如链的能量以使后轮沿向前方向旋转并推动自行车。传动机构相对于轮的向后旋转可以不被传输。例如,在具有飞轮轮毂的自行车上“倒退蹬踏”可能导致很少或没有能量传递至后轮。另外,飞轮轮毂可以相对于传动机构沿向前方向自由旋转(即,沿向前方向旋转得比传动机构快),从而允许自行车向前滚动得比使用者蹬踏传动机构快。
7.一些自行车可以具有直接驱动或“固定齿轮”传动系,该传动系允许使用者通过倒退蹬踏来减缓向前运动和/或沿向后方向推动自行车。在这种自行车中,直接驱动可以将传动机构联接至轮,使得传动机构沿任一方向的旋转运动传递至轮,并且轮沿任一方向的旋转运动类似地传递至传动机构。
8.常规的锻炼装置利用飞轮轮毂来模拟用于锻炼和/或训练目的的常规自行车体
验,或者利用直接驱动来增加来自使用者的能量需求并提供更强烈的训练体验。
技术实现要素:
9.在一些实施方式中,蹬踏式传动系包括传动机构、轮、飞轮轮毂以及锁定机构。轮具有旋转轴线。飞轮轮毂将传动机构连接至轮,并且飞轮轮毂将扭矩从传动机构围绕旋转轴线沿第一旋转方向传递至轮。锁定机构具有锁定状态和解锁状态。锁定状态将传动机构的部件相对于旋转轴线在旋转方向上固定至轮。
10.在一些实施方式中,循环系统包括车架、由车架支承的车把和由车架支承的传动系。该传动系包括:传动机构,该传动机构构造成接收来自使用者的输入扭矩;轮;以及飞轮轮毂,该飞轮轮毂将传动机构连接至轮,并且该飞轮轮毂构造成将输入扭矩从传动机构仅沿轮的第一旋转方向传递至轮。传动系还包括连接至传动机构和轮的锁定机构。锁定机构具有锁定状态和解锁状态。锁定状态构造成将输入扭矩的至少95%沿轮的第一旋转方向和第二旋转方向传递至轮。第二旋转方向与第一旋转方向相反。
11.在一些实施方式中,一种在蹬踏式传动系中传递扭矩的方法包括:用至少一个踏板接收第一输入力;将第一输入力沿传动系的第一旋转方向转换成传动系中的第一输入扭矩;以及将第一输入扭矩通过飞轮轮毂沿轮的第一旋转方向传递至轮。然后,锁定机构从解锁状态移动至锁定状态以将传动系的部件在旋转方向上固定至轮。该方法还包括:在至少一个踏板处接收第二输入力;将第二输入力沿与传动系的第一旋转方向相反的传动系的第二旋转方向转换成传动系中的第二输入扭矩;以及将第二输入扭矩通过锁定机构沿轮的第二旋转方向传递至轮。
12.提供本概述是为了以简化的形式介绍一些概念选择,这些概念将在下面以详细说明进行进一步描述。本概述不意在标识所要求保护的主题的关键特征或必要特征,也不意在用于帮助判定所要求保护的主题的范围。
13.附加的特征和优点将在以下描述中进行阐述,并且部分将根据描述而明显,或者可以通过实践本文的教识而获知。本发明的特征和优点可以借助于所附权利要求中特别指出的工具和组合实现和获得。本发明的特征将从以下描述和所附权利要求而变得更加完全明显,或者可以通过如下文阐述的本发明的实践来获知。
附图说明
14.为了说明可以获得本公开的上述及其他特征的方式,将通过参照附图中图示的本公开的特定实施方式来呈现更具体的说明。为了更好地理解,贯穿各个附图,相同的元件由相同的附图标记表示。虽然一些附图可以是示意性或夸大的概念表示,但是至少一些附图可以按比例绘制。应当理解的是,附图描绘了一些示例性实施方式,将通过使用附图以附加的特征和细节来描述和解释这些实施方式,在附图中:
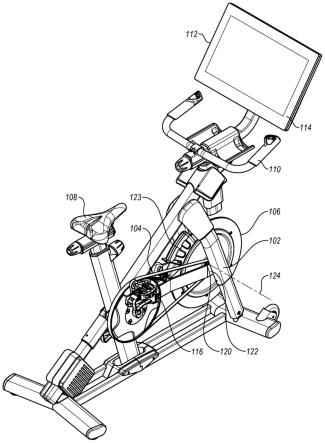
15.图1是根据本公开的至少一个实施方式的健身自行车的立体图;
16.图2是根据本公开的至少一个实施方式的椭圆训练机的侧视图;
17.图3是根据本公开的至少一个实施方式的自行车的侧视图;
18.图4-1是根据本公开的至少一个实施方式的传动系和轮在解锁状态下的侧面示意图;
19.图4-2是图4-1的传动系和轮的实施方式在解锁状态下的侧面示意图,其中,轮在没有来自传动系的输入力的情况下旋转;
20.图5是图4-1和图4-2的传动系和轮的实施方式在锁定状态下的侧面示意图;
21.图6-1是根据本公开的至少一个实施方式的锁定机构的实施方式在解锁状态下的右侧立体图;
22.图6-2是图6-1的锁定机构的实施方式在锁定状态下的右侧立体图;
23.图7是图6-1的锁定机构的实施方式的轴向截面图;
24.图8是图6-1的锁定机构的实施方式的左侧立体图;
25.图9是根据本公开的至少一个实施方式的锁定机构的可旋转把手的内部视图;
26.图10是根据本公开的至少一个实施方式的具有摩擦离合器的锁定机构的侧视截面图;
27.图11是根据本公开的至少一个实施方式的电致动锁定机构的侧视截面图;
28.图12是根据本公开的至少一个实施方式的具有轴向定向的互锁特征的锁定机构的轮构件的立体图;
29.图13是根据本公开的至少一个实施方式的包括位于其中的流体的锁定机构的侧视截面示意图;
30.图14是根据本公开的至少一个实施方式的具有径向可移动部件的锁定机构的立体图;以及
31.图15是图示了根据本公开的至少一个实施方式的选择性在旋转方向上固定蹬踏式传动系和轮的方法的流程图。
具体实施方式
32.在根据本公开的人力循环系统的一些实施方式中,传动系可以包括飞轮轮毂,该飞轮轮毂具有选择性可致动的锁定机构以绕过飞轮轮毂并产生直接驱动连结。如本文所述,可锁定式轮毂可以提供另外的训练和/或推进选项,同时增加对于使用者的效率、安全性和乐趣。
33.图1至图3是人力循环系统的示例。每个系统接收来自使用者的圆形或椭圆形输入,并且可以将该输入沿一个或两个旋转方向传递至轮或飞轮。图1是根据本公开的健身自行车100的实施方式的立体图。健身自行车100可以包括支承传动系104和至少一个轮106的车架102。车架102还可以支承供使用者坐的座部108、供使用者抓握的车把110、一个或更多个显示器112或其组合。例如,健身自行车100的一些实施方式可以包括座部108但是缺少车把110,这是因为使用者可以斜倚在座部108中而不需要在骑行期间稳定自己。这些实施方式尽管缺少车把110也可以包括显示器112。
34.在一些实施方式中,健身自行车100可以使用一个或更多个显示器112来显示关于健身自行车100的操作的反馈或其他数据。在一些实施方式中,传动系104可以与显示器112进行数据通信,使得显示器112呈现从传动系104上的一个或更多个传感器收集的实时信息。例如,显示器112可以对使用者呈现关于节奏、瓦数、模拟距离、持续时间、模拟速度、阻力、倾斜度、心率、呼吸率、其他测量或计算的数据或其组合的信息。在其他示例中,显示器112可以对使用者呈现使用指令,比如用于(本地存储的或经由网络访问的)预定锻炼方案
的锻炼指令;现场锻炼方案,比如经由网络连接广播的现场锻炼;或者模拟自行车骑行,比如真实世界自行车比赛的复制阶段。在其他示例中,显示器112可以在使用健身自行车100期间对使用者呈现一个或更多个娱乐选项。显示器112可以显示广播或有线电视、本地存储的视频和/或音频、经由网络连接的串流的视频和/或音频、从连接的装置(比如智能手机、膝上型电脑或连接至显示器112的其他计算装置)或其他娱乐源显示的视频和/或音频。在其他实施方式中,健身自行车100可以缺少显示器112,并且向外部或外围装置提供关于传动系104的信息或其他锻炼课程数据。例如,健身自行车100可以与智能手机、可佩戴装置、平板电脑、膝上型电脑或其他电子装置通信以允许使用者记录他们的锻炼信息。
35.健身自行车100可以具有与健身自行车100的一个或更多个部件进行数据通信的计算装置114。例如,计算装置114可以允许健身自行车100收集来自传动系104的信息并实时显示这些信息。在其他示例中,计算装置114可以发送命令以启动车架102和/或传动系104的一个或更多个部件来改变健身自行车100的行为。例如,在训练课程期间,车架102可以移动以模拟显示在显示器112上的上坡或下坡(incline or decline)。类似地,传动系104可以变化以改变阻力、档位或其他特性,从而为使用者模拟不同的体验。传动系104可以增加阻力以模拟爬山或需要来自使用者的更多能量的输入的其他体验,或者传动系104可以改变档位(例如,物理地或“虚拟地”),并且由计算装置114计算的距离可以反映所选择的档位。
36.在一些实施方式中,传动系104可以与显示器112进行数据通信,使得传动系104可以响应于模拟锻炼体验的一个或更多个部分而改变。显示器112可以对使用者呈现上坡,并且传动系104可以在阻力上增加以反映模拟的上坡。在至少一个实施方式中,显示器112可以对使用者呈现上坡,并且车架102可以向上倾斜,并且传动系104可以同时增加阻力以为使用者创建沉浸式体验。
37.计算装置114可以在具有或不具有显示器112的情况下允许追踪锻炼信息、记录锻炼信息、将锻炼信息通信至外部电子装置或者它们的组合。例如,计算装置114可以包括允许计算装置114向随后可以由使用者访问的第三方存储装置(例如,互联网和/或云存储)传输数据的通信装置。
38.在一些实施方式中,传动系104可以包括:输入部件,该输入部件接收来自使用者的输入力;以及传动机构,该传动机构将力通过传动系104传递至使轮106移动的轮毂。在图1中图示的实施方式中,输入部件是允许使用者向带118施加力的一组踏板116。带118可以使轮轴120旋转。轮轴120的旋转可以由轮毂122传递至轮106。在其他实施方式中,带118可以使轮毂122的一部分旋转,并且轮106和轮毂122可以在保持与轮轴120未旋转联接的同时由轮轴120支承。本公开设想了与轮轴120和/或轮毂122的一部分接合的传动机构。在一些实施方式中,轮106可以是飞轮。
39.轮毂122可以是飞轮轮毂122,在轮106的旋转速度超过轮轴120的旋转速度时,飞轮轮毂122允许轮106继续旋转。轮毂122可以是围绕轮106、轮轴120和轮毂122的旋转轴线124沿两个方向在轮轴120与轮106之间传输扭矩的直接驱动或“固定齿轮”轮毂122。在一些实施方式中,轮毂122能够从解锁状态下的飞轮行为选择性地移动至锁定状态下的直接驱动行为,以进一步增强使用者体验和/或向使用者提供另外的锻炼选项。
40.解锁状态可以将输入扭矩从传动系沿第一旋转方向传递至轮,并且可以沿第二旋
转方向传递很小的扭矩或者不传递扭矩。例如,解锁状态可以沿第一旋转方向传递大致所有的输入扭矩(较少的传动系损失并且取决于部件的拉伸或其他屈服强度),并且沿第二旋转方向传递输入扭矩的小于5%。在另一示例中,解锁状态可以沿第一旋转方向传递大致所有的输入扭矩,并且沿第二旋转方向传递输入扭矩的小于3%。在又一示例中,解锁状态可以沿第一旋转方向传递大致所有的输入扭矩,并且沿第二旋转方向传递输入扭矩的小于1%。在至少一些示例中,解锁状态可以沿第二旋转方向传递输入扭矩的小于0.1%。
41.锁定状态可以沿第一旋转方向和第二旋转方向传递大致所有的输入扭矩(较少的动力传动系损失并且取决于部件的拉伸或其他屈服强度)。在一些实施方式中,锁定状态可以沿第一旋转方向和第二旋转方向传递输入扭矩的大于95%。在其他实施方式中,锁定状态可以沿第一旋转方向和第二旋转方向传递输入扭矩的大于97%。在其他实施方式中,锁定状态可以沿第一旋转方向和第二旋转方向传递输入扭矩的大于99%。
42.在一些实施方式中,锁定状态可以将大于300牛顿米(n-m)的扭矩从传动系沿第一旋转方向和第二旋转方向传递至轮,而不会使传动系和轮相对于彼此滑动。在其他实施方式中,锁定状态可以将大于400n-m的扭矩从传动系沿第一旋转方向和第二旋转方向传递至轮,而不会使传动系和轮相对于彼此滑动。在一些实施方式中,锁定状态可以将大于500n-m的扭矩从传动系沿第一旋转方向和第二旋转方向传递至轮,而不会使传动系和轮相对于彼此滑动。
43.在一些实施方式中,在解锁状态下,传动系104的踏板116可以在来自使用者的输入已经停止之后继续移动。例如,在没有来自使用者的进一步输入的情况下,轮106的旋转惯量可以迫使踏板116继续旋转。出于安全目的,制动器123可以定位在车架102上或由车架102支承,并且制动器123构造成使传动系104的轮106或其他部分停止或减慢。
44.在一些实施方式中,制动器123可以是摩擦制动器,比如阻力制动器、鼓式制动器、钳式制动器、悬臂制动器或盘式制动器,制动器123可以以机械的方式、以液压的方式、以气动的方式、以电子的方式、通过其他方式或其组合来致动。在其他实施方式中,制动器123可以是通过施加磁场使轮106和/或传动系104的运动减慢和/或停止的磁制动器。在一些示例中,可以通过使用者旋转旋钮来移动制动器123而手动迫使制动器与轮106接触。在其他示例中,制动器123可以是盘式制动器,其中,卡钳由车把110上的杆件液压致动。在其他示例中,制动器可以由计算装置114响应于一个或更多个传感器致动。
45.在一些实施方式中,传动系104从飞轮(单向)传动系改变成直接驱动(双向)传动系可以由封锁装置限制。例如,传动系104能够在轮106的限定旋转速度以下于锁定状态与解锁状态之间移动。在一些实施方式中,封锁装置可以在轮106具有大于60转每分钟(rpm)的旋转速度时防止锁定状态与解锁状态之间的运动。在其他实施方式中,封锁装置可以在轮106具有大于30rpm的旋转速度时防止锁定状态与解锁状态之间的运动。在其他实施方式中,封锁装置可以在轮106具有大于10rpm的旋转速度时防止锁定状态与解锁状态之间的运动。在其他实施方式中,封锁装置可以在轮106具有大于0rmp的旋转速度时防止锁定状态与解锁状态之间的运动。在至少一个实施方式中,封锁装置可以防止锁定状态与解锁状态之间的运动,除非制动器123与轮106和/或传动系104接合而防止轮106和/或传动系的运动。
46.在其他实施方式中,封锁装置和/或安全制动器可以与一个或更多个传感器,比如速度传感器、扭矩传感器、瓦特计或其他传感器进行数据通信,以测量和监测使用者的输入
以及传动系104和/或轮106的运动。
47.图2是可以用于锻炼的自行车系统的另一实施方式。椭圆训练机200可以包括车架202,车架202支承连接至具有安全制动器223的轮206的传动系204。车架202可以支承显示器212和/或计算装置214以对使用者呈现、追踪、记录、存储或传输信息。在一些实施方式中,传动系204可以具有来自使用者的包括车把210和踏板216两者的输入。例如,传动机构,比如图示的实施方式的连杆218,可以通过车把210和/或踏板216的运动接收来自使用者的力。踏板216可以通过椭圆形路径循环,而车把210可以沿弧形路径摆动(箭头a和b),以驱动连杆218。在其他实施方式中,传动系204可以具有固定车把210,并且踏板216可以独立于车把210驱动连杆218。连杆218可以使轮轴220旋转,并且轮轴220的旋转可以通过轮毂222传递至轮206。
48.轮毂222可以是飞轮轮毂222,飞轮轮毂222在轮206的旋转速度超过轮轴220的旋转速度的情况下允许轮206继续旋转。轮毂222可以是直接驱动轮毂222,轮毂222围绕轮206、轮轴220和轮毂222的旋转轴线224沿两个方向在轮轴220与轮206之间传输扭矩。在一些实施方式中,轮毂222能够从飞轮行为选择性地移动至直接驱动行为,以进一步增强使用者的体验和/或向使用者提供另外的锻炼选项。
49.图3是根据本公开的另一循环系统的实施方式的侧视图。在一些实施方式中,自行车300可以具有车架302,车架302支承:构造成使轮306旋转的传动系304;以及座部308和/或车把310以支承使用者。传动系304可以包括用以接收来自使用者的输入力的踏板316以及将力传递至轮轴320的传动机构,比如链318或带。轮毂322可以将扭矩从轮轴320传递至轮306以使轮306围绕旋转轴线324旋转。
50.轮毂322可以是飞轮轮毂322,飞轮轮毂322在轮306的旋转速度超过轮轴320的旋转速度的情况下允许轮306继续旋转。轮毂322可以是围绕轮306、轮轴320和轮毂322的旋转轴线324沿两个方向在轮轴320与轮306之间传输扭矩的直接驱动轮毂322。在一些实施方式中,轮毂322能够选择性地从飞轮行为移动至直接驱动行为,以进一步增强使用者的体验和/或向使用者提供另外的锻炼选项。在一些实施方式中,轮毂322能够通过定位在车把310上或由使用者在使用自行车300期间能够触及的其他位置上的控制器326在锁定位置与解锁位置之间移动。
51.图4-1至图5是可以用于本文所述的循环系统(例如,关于图1所述的健身自行车100、关于图2所述的椭圆训练机200以及关于图3所述的自行车300)的传动系和轮的实施方式的示意图。蹬踏式传动系404可以构造成使轮406旋转。如本文中使用的“蹬踏式传动系”可以包括以循环模式接收来自人的输入力并传递该力以使轮旋转的任何连杆、机构或系统。例如,蹬踏式传动系可以包括平台踏板,平台踏板在锻炼自行车和用于运输的常规自行车上是常见的。在其他示例中,蹬踏式传动系可以包括“无夹踏板”,该无夹踏板与使用者的鞋上的防滑钉接合,以允许在整个踏板行程中向传动系的将更高效的动力传输。在其他示例中,蹬踏式传动系可以包括手踏板或抓握件,该手踏板或抓握件允许使用者用他们的手使传动系的踏板循环,例如,以增强或恢复使用者的上身。在其他示例中,具有手踏板的传动系可以允许具有有限或没有下体控制的使用者操作循环系统以用于锻炼和/或运输。
52.图4-1是传动系404在解锁状态下的侧视图,该传动系404将向前的扭矩428从踏板416围绕轮406的旋转轴线424沿第一旋转方向430传递至轮406。传动系404可以包括将力从
踏板416传递至轮406的传动机构。链418可以与能够由踏板416旋转的第一齿轮432接合。链418还可以与轮轴420上的第二齿轮434接合,以围绕旋转轴线424向轮轴420施加扭矩并使轮轴420旋转。轮轴420通过轮毂422将扭矩传递至轮。在图4-1中,轮毂422是沿第一旋转方向430传递扭矩的飞轮轮毂。
53.图4-2图示了图4-1的传动系404,其中,踏板416以比轮406慢的旋转速度沿第一旋转方向430移动。例如,当轮406由于旋转惯性或由于在自行车运动的同时与地面接触而旋转时,踏板416可以是静止的。在其他示例中,踏板416可以沿与第一旋转方向相反的第二旋转方向旋转。踏板416可以使链418和轮轴420沿第二旋转方向移动,并且飞轮轮毂422可以向轮406传递很小的扭矩或者不传递扭矩,以中断轮406沿第一旋转方向430的旋转。
54.图5是图4-1的传动系404在第二锁定状态下的侧视图。在锁定状态下,传动系404可以围绕旋转轴线424沿第一旋转方向430和相反的第二旋转方向436两者将扭矩传递至轮406。例如,在锁定状态下,来自轮轴420的旋转的扭矩沿任一旋转方向直接传递至轮406。
55.例如,使用者可以向踏板416施加向前的扭矩428,该向前的扭矩428通过链418传递至轮轴420。传动系404将轮轴420和轮406在旋转方向上锁定在锁定状态。相反地,轮406的运动可以通过轮毂422将扭矩施加至轮轴420,从而移动踏板416。例如,当轮沿第一旋转方向430移动时,踏板416也移动。使用者可以通过踏板416施加向后的扭矩438以使轮406在不需要轮406本身上的其他制动器的情况下减速(即,使轮406沿第二旋转方向436加速)。
56.在一些实施方式中,传动系可以在传动系的运动期间于解锁状态与锁定状态之间转换,并且在其他实施方式中,传动系可以在传动系静止时从解锁状态转换至锁定状态。在其他实施方式中,传动系可以构造成在运动期间以及在静止时都从解锁状态转换至锁定状态。在至少一个示例中,在传动系的轮轴和轮以相等的旋转速度移动时,传动系可以在解锁状态与锁定状态之间转换。
57.图6-1是图示了传动系504在解锁状态下的立体图。传动系504可以具有传动机构,比如图6-1的实施方式中描绘的带518。传动机构可以使轮轴520和/或轮毂522围绕轮轴520、轮毂522和轮506的旋转轴线524旋转。轮毂522可以将向前的扭矩528传递至轮506,并使轮506沿向前的第一旋转方向530加速。在解锁状态下,轮毂522可以类似于常规的飞轮轮毂作用,允许来自传动机构的向后的扭矩538的输入不被传递至轮506,从而允许轮506沿第一旋转方向530自由旋转。
58.在一些实施方式中,传动系504可以包括锁定机构540。如本文所述,锁定机构540能够在解锁状态(图6-1中图示)与锁定状态(图6-2中图示)之间移动。在一些实施方式中,锁定机构540可以具有至少一个轮构件542,该轮构件542能够移动以与传动构件544接合。例如,轮构件542能够沿着轮轴520、轮毂522和轮506的旋转轴线524沿轴向方向546移动。在其他示例中,轮构件542可以沿径向方向或与旋转轴线524垂直的其他方向移动。在一些实施方式中,锁定机构540能够仅在安全制动器523接合时移动。
59.在一些实施方式中,传动构件544可以相对于传动机构(例如,带518)和/或轮轴520在旋转方向上固定,使得传动构件544以与轮轴520相同的旋转速度旋转。轮构件542可以相对于轮506在旋转方向上固定,使得轮构件542以与轮506相同的旋转速度旋转。虽然在图6-1和图6-2的图示的实施方式中,轮构件542能够相对于轮506和传动构件544移动,但是在其他实施方式中,代替轮构件542或除了轮构件542之外,传动构件544能够相对于轮506
和/或轮构件542移动。
60.在其他实施方式中,轮构件542和/或传动构件544可以包括单向轴承。飞轮轮毂522可以沿第一旋转方向530传递扭矩。在锁定状态下,单向轴承可以通过锁定机构540沿第二旋转方向传递扭矩。因此,在锁定状态下,飞轮轮毂522和锁定机构540的单向轴承可以协同工作以将轮506在旋转方向上固定至传动系504。
61.传动构件544可以选择性地联接至轮构件542,以将扭矩从传动构件544传递至轮构件542,并且使轮构件542将扭矩传输至传动构件544。接合轮构件542和传动构件544可以允许使用者更好地控制轮506的运动并且/或者可以增强使用者的锻炼体验。
62.在一些实施方式中,轮构件542和传动构件544可以通过一个或更多个互锁机械特征接合。例如,图6-1和图6-2中图示的实施方式描绘了具有多个径向定向(相对于旋转轴线524)的互锁特征548的传动构件544与具有多个互补互锁特征550的轮构件542的接合。在其他实施方式中,轮构件542和传动构件544可以具有轴向定向的互锁特征。在其他实施方式中,轮构件542和传动构件544可以通过其他非机械接合机构,比如使用轮构件542与传动构件544之间的接触摩擦的摩擦离合器片、轮构件542与传动构件544之间的磁性接合、轮构件542与传动构件544之间的粘性阻力接合(例如,轮构件542与传动构件544之间的具有流体层的表面接合)或其组合接合。
63.图6-2是图6-1的传动系504和轮506在锁定状态下的立体图。在一些实施方式中,轮构件542可以沿轴向方向朝向传动构件544移动,从而使轮构件542和传动构件544接合。在锁定状态下,轮构件542和传动构件544可以相对于彼此在旋转方向上固定,使得绕过轮毂522并且将扭矩从传动机构(即,带518)和/或轮轴520直接传递至轮506。
64.当在锁定状态下绕过轮毂522时,在图6-2中图示的实施方式中,锁定机构540可以将向前的扭矩528从带518和/或轮轴520传递至轮506,以使轮506沿第一旋转方向530加速,并且锁定机构540可以将向后的扭矩538从带518和/或轮轴520传递至轮506,以使轮506沿第二旋转方向536加速。
65.在一些实施方式中,锁定机构540的轮构件542可以在旋转方向上固定至轮506,并且能够相对于轮506和一个或更多个柱552轴向移动。在其他实施方式中,轮构件542能够沿着另一机构在轴向方向546上相对于轮506移动,并且可以通过一个或更多个花键、摩擦接合、磁性接合、粘性接合或其组合将扭矩传输至轮506。
66.图7是根据本公开的锁定机构640的实施方式的轴向截面图。锁定机构640可以在锁定状态下选择性地接合成绕过轮毂622并将扭矩从传动机构618直接传递至轮606。在一些实施方式中,通过使锁定机构640的一部分沿轴向方向646(即,沿轮轴620的方向)机械地移动,锁定机构640在解锁状态(图7中描绘)与锁定状态之间移动。锁定机构640的可移动部分能够沿着柱652或其他支承构件移动。例如,锁定机构640的轮构件642可以由将轮构件642在旋转方向上固定至轮606的多个柱652支承。
67.在一些实施方式中,轮构件642能够由推杆654移动,推杆654可以施加轴向力以使轮构件642沿轴向方向646移动。推杆654的轴向位置可以由使用者选择。在其他实施方式中,推杆654的轴向位置可以由与计算装置、比如关于图1至图3描述的计算装置进行数据通信的电动马达来选择。计算装置可以基于预定的锻炼计划或者基于来自与计算装置通信的一个或更多个传感器的信息而使锁定机构在锁定状态与解锁状态之间选择性地移动。
68.在一些实施方式中,推杆654的轴向位置可以至少部分地由把手656控制。把手656可以允许使用者手动调节推杆654相对于轮606和/或传动构件644的位置。例如,把手656能够沿轴向方向646移动以沿轴向方向646推动推杆654。在其他示例中,把手656能够旋转成具有倾斜表面以沿轴向方向646推动推杆654。
69.把手656可以将推杆654相对于轮构件642在轴向上推动。在一些实施方式中,轮构件642和传动构件644可以经由传动构件644上的互锁特征648和轮构件642上的互补互锁特征650接合。在一些情况下,互锁特征648和互补互锁特征650可能未对准。在这种情况下,将轮构件642朝向传动构件644推动可能会使互锁特征648和互补互锁特征650磨损或损坏。在其他实施方式中,锁定机构640可以包括马达672,马达672沿轴向方向646推动推杆654和/或轮构件642。例如,锁定机构640可以包括电动马达、气动活塞和气缸、液压活塞和气缸、线性磁体或其他致动器,以使轮构件642和传动构件644朝向彼此推动。在其他示例中,马达672可以向把手656施加扭矩以使把手656旋转,并沿轴向方向646推动推杆654和/或轮构件642。
70.在一些实施方式中,偏置元件658可以定位在推杆654与轮构件642之间。例如,偏置元件658可以基于推杆654的轴向位置(例如,基于胡克定律)向轮构件642施加力。在一些示例中,偏置元件658可以是比如图7中图示的螺旋弹簧。在其他示例中,偏置元件658可以是波形弹簧、板簧、可压缩衬套、可压缩流体、一个或更多个磁体或其组合。偏置元件658可以将轮构件642和传动构件644朝向彼此推动直至传动构件644上的互锁特征648和轮构件642的互补互锁特征650对准为止,此刻,轮构件642和传动构件644可以朝向彼此移动,并且互锁特征648和互补互锁特征650可以接合成使得锁定机构640处于锁定状态。
71.图8是图7的轮606和把手656的实施方式的立体图。在一些实施方式中,把手656能够围绕旋转轴线624旋转。例如,围绕旋转轴线624沿锁定方向660旋转把手656可以使锁定机构的至少一部分沿轴向方向646移动,从而将锁定机构640移动至锁定状态。
72.在一些实施方式中,把手656可以具有一个或更多个表面特征662,以增加或改善使用者利用把手656的抓握或触觉反馈。例如,表面特征可以包括纹理表面、橡胶表面、突出部、凹部或可以允许使用者在没有视觉确认的情况下更容易地识别和操作把手的其他特征。
73.图9是图示了图8的把手656的侧视图,其示出了面对轮和锁定机构的侧部。在一些实施方式中,把手656可以具有至少部分地凹入把手656中的一个或更多个倾斜表面664。倾斜表面664可以具有深端部666和浅端部668。围绕旋转轴线624旋转把手656可以使倾斜表面664相对于推杆(比如关于图7描述的推杆654)的端部移动,并随着倾斜表面664移动经过推杆时轴向(即,垂直于把手656的旋转)地推动推杆。
74.在一些实施方式中,把手656可以是双稳态的。例如,双稳态把手656可以具有把手656稳定的两个位置。图7至图9中图示的把手656的实施方式在倾斜表面664的任一端部处都是稳定的。在一些实施方式中,锁定机构中的偏置元件可以使推杆朝向把手656和/或朝向倾斜表面664偏置。推杆可以在来自偏置元件的力的作用下按压抵靠倾斜表面664。推杆抵靠倾斜表面664的接触可以使把手656围绕旋转轴线624旋转,直至推杆搁置在倾斜表面664的深端部666中为止。因此,深端部666可以是把手656的第一稳定位置。
75.在一些实施方式中,倾斜表面664的浅端部668可以具有位于浅端部668中的凹部
或凹槽670,使得推杆可以搁置在凹部或凹槽670中,产生把手656的第二稳定位置。当位于第一稳定位置与第二稳定位置之间的任何位置时,与推杆的接触可以使把手656朝向第一稳定位置偏置。在图7至图9的锁定机构和把手656的实施方式中,第一稳定位置可以是锁定机构的解锁状态,并且第二稳定位置可以是锁定机构的锁定状态。因此,锁定机构可以在处于位置之间时朝向锁定机构的解锁状态偏置。在锁定机构的其他实施方式中,锁定机构可以在处于位置之间时朝向锁定机构的锁定状态偏置。
76.在其他实施方式中,倾斜表面可以是连续的,并且围绕把手656的旋转轴线624起伏。在这样的实施方式中,把手656可以旋转通过在锁定状态与解锁状态之间交替的索引稳定位置。例如,把手656沿第一方向的连续旋转可以使锁定机构在锁定状态与解锁状态之间循环。
77.虽然图6-1至图9图示了具有径向互锁机械特征以使锁定机构通过轴向运动在锁定状态与解锁状态之间移动的锁定机构的实施方式,但是其他锁定机构可以使用其他接合方法。例如,锁定机构的实施方式可以在锁定状态下通过使用沿轴向方向定向的互锁机械特征、沿轴向方向定向的摩擦力、沿径向定向的摩擦力、磁力、粘性阻力、其他接合力或其组合来传递扭矩。图10图示了用于蹬踏式自行车系统的锁定机构740的另一实施方式。
78.锁定机构740可以具有轮构件742和传动构件744。在一些实施方式中,传动构件744可以由传动机构718直接驱动。在其他实施方式中,传动机构718可以驱动供传动构件744在旋转方向上固定的轮轴720和/或轮毂722的至少一部分。轮构件742能够沿轴向方向746朝向或远离传动构件744移动。在一些实施方式中,轮构件742和传动构件744能够通过使用者的手动操作(比如关于图7至图9描述的把手656)或通过马达772相对于彼此移动。
79.在一些实施方式中,轮构件742的表面可以接触传动构件744的表面。在使用期间,轮构件742与传动构件744之间的摩擦可以足以使得由传动机构718施加至传动构件744的扭矩可以完全传输至轮构件742(例如,在轮构件742与传动构件744之间没有滑动)。在一些实施方式中,彼此接触的轮构件742的表面和传动构件744的表面可以是大致平坦的而几乎没有或没有表面起伏或其他互锁特征。例如,轮构件742和传动构件744可以类似于摩擦离合器片系统在轮构件742与传动构件744之间传递扭矩。在其他实施方式中,轮构件742和传动构件744可以具有一个或更多个表面特征,这些表面特征在轴向方向746上具有高度,以增加摩擦和/或改善轮构件742与传动构件744之间的扭矩传递。
80.轮构件742与传动构件744之间的摩擦力与轮构件742和传动构件744之间沿轴向方向746的接触力至少部分地相关。在一些实施方式中,接触力可以由比如关于图7至图9中描述的可旋转的把手提供。图11是具有电动马达872的锁定机构840的实施方式的侧视截面图,电动马达872使锁定机构在锁定状态与解锁状态之间移动。在一些实施方式中,电动马达872可以使一个或更多个延伸部874沿轴向方向846移动。电动马达872可以经由通信线缆876与一个或更多个控制器(比如关于图3描述的控制器326)和/或计算装置(比如关于图1描述的计算装置114)通信。在一些实施方式中,电动马达872可以经由无线通信与一个或更多个控制器和/或计算装置进行数据通信。在一些实施方式中,电动马达872可以与允许对使用者和/或计算装置进行反馈的一个或更多个传感器进行数据通信。因此,电动马达872可以作为锁定机构840的封锁装置操作。电动马达872可以由还与一个或更多个传感器通信的计算装置控制。因此,锁定机构840的状态可以仅在计算装置从传感器接收到确认轮806
静止或低于阈值旋转速度的信息时或者在传感器确认使用者没有向传动构件844施加扭矩时是能够改变的。例如,当传动构件844和轮构件842两者静止时,计算装置可以向电动马达872发送命令以致动锁定机构840。在其他示例中,当传动构件844和轮构件842两者具有相等的旋转速度时,计算装置可以向电动马达872发送命令以致动锁定机构840。
81.延伸部874可以接触或连接至轮构件842。例如,在使用期间,延伸部874可以与轮构件842断开联接,从而允许轮构件842与轮806一起旋转。延伸部874可以随着轮806和轮构件842继续旋转在轮构件842的外表面878上滑动的同时而沿轴向方向846施加力。电动马达872和延伸部874可以向轮构件842施加轴向力,而不会削弱轮806的旋转或者以其他方式中断轮806的使用。在一些实施方式中,延伸部874可以沿着轮构件842的外表面878滑动。在其他实施方式中,延伸部874可以包括接触轮构件842的外表面878的一个或更多个轴承。在其他实施方式中,轮构件842的外表面878可以包括一个或更多个可移动环,可移动环可以接收来自延伸部874的轴向力,并且从与延伸部874的接触向轮构件842和/或轮806的其余部分传递很少的扭矩或不传递扭矩。
82.在一些实施方式中,轮构件和/或传动构件可以具有一个或更多个表面特征,所述一个或更多个表面特征减小了在锁定状态下于轮构件与传动构件之间传递扭矩所需的轴向力。图12是轮构件942的实施方式的立体图,该轮构件942包括沿轴向方向946定向的互锁机械特征948。在一些实施方式中,互锁机械特征可以关于旋转轴线924对称(例如,沿第一旋转方向和第二旋转方向具有相同的轮廓)。例如,常规的齿轮可以具有在任一旋转方向上有着对称轮廓的多个齿。
83.图12中图示的面齿轮的实施方式具有多个有着不对称轮廓的表面特征。互锁机械特征948可以在第二旋转方向936上比第一旋转方向930更积极地接合。例如,相比于向前面980相对于第一旋转方向930的角度,互锁机械特征948的向后面978可以具有相对于第二旋转方向936的更陡的角度。互锁机械特征948的不对称轮廓可以允许锁定机构在沿第二旋转方向更积极(aggressive)地接合的同时沿第一旋转方向930“滑动”,这是因为向后面978在锁定状态下沿第二旋转方向936加压地接合。在第一旋转方向上,根据本公开的传动系可以依靠飞轮轮毂来传递输入扭矩,因此,在第一旋转方向上的较不积极的轮廓可以在不削弱将扭矩沿第一旋转方向传递至轮的情况下降低对锁定机构的损坏风险。
84.如本文所述,锁定机构可以具有锁定状态和解锁状态。在一些实施方式中,锁定机构还可以具有中间状态。中间状态可以在没有在旋转方向上固定传动构件和轮构件的情况下在轮构件与传动构件之间传递一些扭矩。例如,图13图示了锁定机构1040的实施方式,锁定机构1040包括轮构件1042和传动构件1044,其中,流体1082定位在轮构件1042与传动构件1044之间。流体1082可以定位在壳体1084中。在一些实施方式中,流体1082可以是可压缩流体。在其他实施方式中,流体1084可以是不可压缩流体。流体1082可以具有在轮构件1042与传动构件1044之间产生阻力1086的粘度。在一些实施方式中,阻力1086可以随着轮构件1042与传动构件1044之间的较大旋转速度差而增加。在其他实施方式中,阻力1086可以随着轮构件1042与传动构件1044之间的间距1088减小而增加。在一些实施方式中,轮构件1042与传动构件1044的间距1088可以通过使用者的手动操作(比如关于图7至图9描述的把手656)或通过马达1072而能够改变。
85.例如,锁定机构1040可以具有解锁状态、锁定状态以及中间状态,在解锁状态下,
轮构件1042和传动构件1044处于足以在轮构件1042与传动构件1044之间传递小于扭矩的5%的间距,在锁定状态下,轮构件1042和传动构件1044彼此接触并且通过摩擦力和/或机械互锁而彼此在旋转方向上固定;在中间状态下,流体阻力1086在轮构件1042与传动构件1044之间传递扭矩的大于5%,并且轮构件1042和传动构件1044相对于彼此没有在旋转方向上固定。当在使用期间于锁定状态与解锁状态之间转换时,中间状态可以有利于允许轮构件1042和传动构件1044接近或匹配旋转速度。
86.在一些实施方式中,流体1082可以具有可变的粘度。例如,流体1082可以是磁流变流体,该磁流变流体通过对流体施加磁场来改变有效粘度。在一些实施方式中,流体1082可以具有可变粘度,其中,粘度的范围足以使得粘度范围的低端(即,没有施加磁场的低粘度状态)在传动系与轮之间传递扭矩的小于5%并且粘度范围的高端(即,被施加磁场的高粘度状态)将传动系和轮在锁定状态下在旋转方向上固定。换句话说,可变粘度流体可以允许用于在轮构件1042与传动构件1044之间具有固定间距1088的锁定机构。
87.在一些实施方式中,锁定机构可以包括轮构件和/或传动构件,该轮构件和/或传动构件能够沿相对于轮的旋转轴线的径向方向移动。例如,蹬踏式传动系可能在轴向方向上具有空间限制,并且锁定机构的一部分的轴向运动可能是不期望的。在至少一个示例中,增加轮、轮毂、匣或传动系的其他部分在轴向方向上的宽度可能需要改变现有自行车或其他装置的车架。因此,将一个或更多个部件沿径向方向移动以适应不同的形状因素和/或壳体尺寸可以是有益的。
88.图14是锁定机构1140的另一实施方式的立体图,该锁定机构1140构造成选择性在旋转方向上固定传动机构1118和轮1106。在一些实施方式中,锁定机构1140可以具有轮构件1142和传动构件1144,轮构件1142和传动构件1144定位成轮构件1142和传动构件1144中的一者的至少一部分在另一者的径向外侧。例如,轮构件1142的至少一部分可以定位成相对于旋转轴线1124与传动构件1144的一部分在轴向上重叠,并且在与旋转轴线1124垂直的径向方向1190上进一步远离旋转轴线1124。轮构件1142的一部分定位在传动构件1144的径向外侧。换句话说,轮构件1142的至少一部分可以类似于鼓式制动器(例如,当由马达1172致动时)操作以压缩传动构件1144并沿第一旋转方向1130和第二旋转方向1136两者在轮构件1142与传动构件1144之间传递扭矩。
89.图15是选择性在旋转方向上固定蹬踏式传动系的方法1291的实施方式的流程图。方法1291可以包括在1292处接收来自使用者的第一输入力。在一些实施方式中,第一输入力可以由脚踏板,比如平台踏板、夹式踏板、无夹式踏板或构造成接收由使用者的脚在循环运动中施加的力的其他踏板接收。在其他实施方式中,第一输入力可以由手动踏板接收,比如由可旋转抓握件、平台、往复把手或构造成接收由使用者的手在循环运动中施加的力的其他手动抓握件接收。
90.方法1291还可以包括在1293处将第一输入力沿第一旋转方向转换成第一输入扭矩,并且在1294处将第一输入扭矩通过飞轮轮毂沿轮的第一旋转方向传递至轮。方法1291包括在1295处将锁定机构从解锁状态移动至锁定状态,以将传动系的至少一部分在旋转方向上固定至轮。在锁定机构处于锁定状态时,方法1291包括在1296处接收来自使用者的第二输入力,并且在1297处将第二输入力沿与第一旋转方向相反的第二旋转方向转换成第二输入扭矩。方法1291然后包括在1298处通过处于锁定状态的锁定机构将第二输入扭矩沿轮
的第二旋转方向传递至轮。
91.在一些实施方式中,该方法可以包括将锁定机构移动至中间状态。锁定机构的中间状态可以在传动系与轮之间传递第三输入扭矩的5%至95%。例如,中间状态可以在允许传动系和轮以不同的旋转速度旋转的同时传递扭矩。锁定机构可以保持在中间状态,直至传动系和轮具有彼此相差在5%以内的旋转速度为止。当锁定机构处的传动系旋转速度和锁定机构处的轮旋转速度彼此相差在5%之内时,锁定机构可以移动锁定状态以将传动系和轮相对于彼此在旋转方向上固定。
92.工业适用性
93.总体上,本发明涉及将蹬踏式传动系中的轮毂从解锁状态选择性地移动至锁定状态。解锁状态可以将输入扭矩从传动系沿第一旋转方向传递至轮,并且可以沿第二旋转方向传递很小的扭矩或者不传递扭矩。例如,解锁状态可以沿第一旋转方向传递大致所有的输入扭矩(较少的传动系损失并且取决于部件的拉伸或其他屈服强度),并且沿第二旋转方向传递输入扭矩的小于5%。在另一示例中,解锁状态可以沿第一旋转方向传递大致所有的输入扭矩,并且沿第二旋转方向传递输入扭矩的小于3%。在又一示例中,解锁状态可以沿第一旋转方向传递大致所有的输入扭矩,并且沿第二旋转方向传递输入扭矩的小于1%。
94.锁定状态可以沿第一旋转方向和第二旋转方向传递大致所有的输入扭矩(较少的传动系损失并且取决于部件的拉伸或其他屈服强度)。在一些实施方式中,锁定状态可以沿第一旋转方向和第二旋转方向传递输入扭矩的大于95%。在其他实施方式中,锁定状态可以沿第一旋转方向和第二旋转方向传递输入扭矩的大于97%。在其他实施方式中,锁定状态可以沿第一旋转方向和第二旋转方向传递输入扭矩的大于99%。
95.在一些实施方式中,锁定状态可以将大于300牛顿米(n-m)的扭矩从传动系沿第一旋转方向和第二旋转方向传递至轮,而不会使传动系和轮相对于彼此滑动。在其他实施方式中,锁定状态可以将大于400n-m的扭矩从传动系沿第一旋转方向和第二旋转方向传递至轮,而不会使传动系和轮相对于彼此滑动。在一些实施方式中,锁定状态可以将大于500n-m的扭矩从传动系沿第一旋转方向和第二旋转方向传递至轮,而不会使传动系和轮相对于彼此滑动。
96.在一些实施方式中,根据本公开的具有锁定状态和解锁状态的蹬踏式传动系可以用于锻炼系统或装置,比如固定自行车、椭圆训练机、跑步机、越野滑雪训练机、固定手推车、划船机或包括部件的旋转运动的其他锻炼系统或装置。在其他实施方式中,根据本公开的具有锁定状态和解锁状态的蹬踏式传动系可以用于交通和/或娱乐装置和系统,比如自行车(公路自行车、山地自行车、卧式自行车、手推车等)、踏板船、微型飞行器、踏板汽车或其他踏板动力式车辆。
97.通过致动锁定机构以将轮构件和传动构件接合,蹬踏式传动系可以在锁定状态与解锁状态之间选择性地移动。轮构件可以在旋转方向上固定至轮并且传动构件可以在旋转方向上固定至传动系的部件。在解锁状态下,轮构件和传动构件沿第二旋转方向在轮构件与传动构件之间传递输入扭矩的小于5%。在锁定状态下,轮构件和传动构件可以沿第二旋转方向传递输入扭矩的大于95%。
98.在一些实施方式中,轮构件和传动构件可以通过轮构件和传动构件朝向彼此的运动选择性地接合,并且轮构件和传动构件可以通过轮构件和传动构件远离彼此的运动选择
性地断开接合。例如,将锁定机构在锁定状态与解锁状态之间移动可以包括将轮构件相对于轮和传动系移动。在其他示例中,将锁定机构在锁定状态与解锁状态之间移动可以包括将传动构件相对于轮和传动系移动。在其他示例中,将锁定机构在锁定状态与解锁状态之间移动可以包括将轮构件和传动构件两者相对于轮和传动系移动。
99.在一些实施方式中,将锁定机构在锁定状态与解锁状态之间移动可以包括将轮构件沿轮的旋转轴线的轴向方向相对于轮和传动系移动。在其他示例中,将锁定机构在锁定状态与解锁状态之间移动可以包括将传动构件沿轮的旋转轴线的轴向方向相对于轮和传动系移动。在其他示例中,将锁定机构在锁定状态与解锁状态之间移动可以包括将轮构件和传动构件沿轮的旋转轴线的轴向方向相对于轮和传动系移动。例如,轮构件和传动构件在轴向方向上的接合可以类似于盘式制动器起作用。
100.在其他实施方式中,将锁定机构在锁定状态与解锁状态之间移动可以包括将轮构件沿轮的旋转轴线的径向方向相对于轮和传动系移动。在其他示例中,将锁定机构在锁定状态与解锁状态之间移动可以包括将传动构件沿轮的旋转轴线的径向方向相对于轮和传动系移动。在其他示例中,将锁定机构在锁定状态与解锁状态之间移动可以包括将轮构件和传动构件沿轮的旋转轴线的径向方向相对于轮和传动系移动。例如,轮构件和传动构件的径向运动可以类似于鼓式制动器起作用。
101.在一些实施方式中,在锁定状态下,轮构件和传动构件可以直接彼此接触。例如,轮构件和传动构件可以彼此接合,并且通过摩擦接合、机械互锁特征(比如径向和/或轴向定向的齿轮齿)或其他表面特征,比如花键或不平坦表面在轮构件与传动构件之间传递扭矩。例如,轮构件和传动构件可以通过彼此压靠的轮构件和传动构件的摩擦接合而接合。
102.在一些实施方式中,轮构件和传动构件可以具有轴向定向的互锁特征,并且轮构件和传动构件可以通过沿轴向方向相对于彼此的运动而接合(比如面齿轮)。在其他实施方式中,轮构件和传动构件可以具有径向定向的互锁特征,并且轮构件和传动构件可以通过沿轴向方向相对于彼此的运动而接合(比如在旋转方向上互锁并允许轴向平移的花键)。在其他实施方式中,轮构件和传动构件可以具有径向定向的互锁特征,并且轮构件和传动构件可以通过沿径向方向相对于彼此的运动而接合(比如互锁的径向齿)。
103.在处于锁定状态的其他实施方式中,轮构件和传动构件可以在直接接触或不直接接触的情况下间接地彼此接合。例如,轮构件和传动构件可以彼此接合,并且通过磁性接合(永磁体和/或电磁体)、流体阻力接合或通过不需要轮构件与传动构件之间的接触的其他力在轮构件与传动构件之间传递扭矩。
104.在一些实施方式中,流体可以定位在轮构件与传动构件之间。当轮构件与传动构件相对于彼此移动并引起轮构件与传动构件之间的流体的运动时,流体的阻力可以在轮构件与传动构件之间传递至少一部分扭矩。通过流体阻力传递扭矩可以随着轮构件与传动构件之间的间距而变化。例如,随着轮构件与传动构件之间的间距减小,更多的扭矩可以通过流体阻力传递。在其他示例中,相较于在较低粘度的流体中,在较高粘度的流体中可以通过流体阻力传递更多的扭矩。在至少一个示例中,流体可以具有可变粘度,比如通过施加磁场来改变有效粘度的磁流变流体。
105.在其他实施方式中,轮构件和/或传动构件可以包括一个或更多个磁体。轮构件和/或传动构件的磁体可以产生磁场,该磁场可以与轮构件和传动构件相互作用并在轮构
件和传动构件之间施加力。例如,轮构件可以包括第一磁体,并且传动构件可以包括第二磁体。随着轮构件和传动构件彼此靠近移动,第一磁体与第二磁体之间的磁力会增加,使得轮构件与传动构件之间能够传递更大量的扭矩。在一些示例中,第一磁体和/或第二磁体可以是可以被选择性磁化的电磁体。在这样的示例中,轮构件与传动构件之间的间距可以是恒定的,并且轮构件与传动构件之间的磁力可以通过增加或减少电磁体的磁场来增加或减小。
106.在一些实施方式中,当轮构件和传动构件以不同的旋转速度旋转时,将锁定机构在锁定状态与解锁状态之间移动(特别是移动到锁定状态)可能损坏、弯曲、侵蚀、磨损或以其他方式损坏轮构件和/或传动构件。例如,机械互锁特征可能会磨损或弯曲,抑制轮与传动构件的接合。在其他示例中,摩擦接合表面的“滑动”(比如在摩擦离合器中)可能过早地磨损轮构件和/或传动构件的摩擦接合表面。
107.在一些实施方式中,当轮构件的轮旋转速度和传动构件的传动旋转速度不同时,封锁装置可以防止轮构件和/或传动构件朝向彼此接合或移动。例如,当轮构件的轮旋转速度和传动构件的传动旋转速度相差大于0.1rmp、1.0rmp、6.0rmp、10.0rmp、30.0rmp、60.0rmp或更多时,封锁装置可以防止轮构件和/或传动构件朝向彼此的运动接合或运动。在一些示例中,封锁装置可以防止轮构件和/或传动构件朝向彼此的运动接合或运动,除非轮旋转速度和传动旋转速度相同。在其他示例中,封锁装置可以防止轮构件和/或传动构件朝向彼此的运动接合或运动,除非轮旋转速度和传动旋转速度都是0rmp(即,两者是静止的)。
108.在其他实施方式中,封锁装置可以防止轮构件和/或传动构件朝向彼此接合或运动,除非安全制动器接合。安全制动器可以限制和/或防止轮和/或传动系的旋转。在至少一个实施方式中,锁定机构能够在安全制动器接合的同时仅在锁定状态与解锁状态之间移动。
109.在其他实施方式中,锁定机构可以具有中间状态,在该中间状态下,在轮构件与传动构件之间传递扭矩的大于5%且小于95%。中间状态可以允许轮构件和传动构件相对于彼此“滑动”,以允许轮旋转速度和传动旋转速度彼此接近。例如,传动旋转速度可以是0rmp,并且轮旋转速度可以具有100rmp的速度。锁定机构可以移动至中间状态以在锁定机构之间传递扭矩的一部分,并且传动旋转速度可以增加而轮旋转速度可以降低。当传动旋转速度和轮旋转速度在预定范围内时,锁定机构可以移动至锁定状态。例如,在从解锁状态运动至锁定状态期间,使用者可以将转换输入力施加到传动系中,并且锁定机构可以在中间状态下通过锁定机构传递转换输入力的一部分,使得传动旋转速度可以接近轮旋转速度。一旦传动旋转速度和轮旋转速度在预定阈值内,锁定机构可以移动至锁定状态。在其他实施方式中,封锁装置可以在转换输入力大于1磅(4.45牛顿)的情况下防止从中间状态移动至锁定状态。
110.在一些实施方式中,锁定机构、封锁装置、安全制动器或其组合可以由使用者手动控制。例如,锁定机构可以由把手致动。把手可以包括倾斜表面,该倾斜表面在把手相对于锁定机构旋转时可以促使轮构件和传动构件相对于彼此移动。在其他示例中,把手可以具有凸轮凸角,该凸轮凸角促使轮构件和传动构件相对于彼此移动。
111.除了由使用者移动的手动杆之外,锁定机构可以通过自动或动力装置来致动。在
一些实施方式中,把手可以由马达旋转。在其他实施方式中,轮构件和传动构件相对于彼此的位置可以由电动马达,比如步进式马达或蜗轮控制。在其他实施方式中,轮构件和传动构件相对于彼此的位置通过气动活塞和气缸获得。在其他实施方式中,轮构件和传动构件相对于彼此的位置通过液压活塞和液压缸获得。在其他实施方式中,轮构件和传动构件相对于彼此的位置通过线性磁性致动器获得。
112.控制器可以允许使用者选择性地致动锁定机构。例如,控制器可以设置在自行车、固定自行车、椭圆机或其他蹬踏式装置的车把和/或车架上。
113.在其他实施方式中,锁定机构、封锁装置、安全制动器或其组合可以由计算装置控制。在一些示例中,计算装置可以协调锁定机构、封锁装置和安全制动器中的一者或更多者的致动。例如,在使用者请求锁定机构从解锁状态移动至锁定状态时,计算装置可以启动安全制动器以使轮旋转速度和/或传动旋转速度停止,停用封锁装置,并致动锁定机构以移动至锁定状态。
114.在其他示例中,在使用者请求锁定机构从解锁状态移动至锁定状态时,计算装置可以使用一个或更多个传感器(速度传感器、扭矩传感器、功率计等)来测量轮旋转速度和/或传动旋转速度,并且仅当轮旋转速度和传动旋转速度在预定范围内时,计算装置可以启动锁定机构。
115.在其他实施方式中,计算装置可以对使用者呈现预定的锻炼程序。预定的锻炼程序可以包括在解锁状态下蹬踏蹬踏式传动系的程序的一部分和在锁定状态下蹬踏蹬踏式传动系的程序的一部分。在这样的示例中,计算装置可以启动安全制动器以使轮旋转速度和/或传动旋转速度减慢和/或停止,停用封锁装置,并且致动锁定机构以移动至锁定状态,并且与安全制动器断开接合。在其他示例中,计算装置可以将锁定机构移动至中间状态,以在轮构件与传动构件之间传递一部分扭矩。扭矩的部分传递会导致轮旋转速度和传动旋转速度彼此接近。计算装置可以使用一个或更多个传感器来测量轮旋转速度和/或传动旋转速度,并且当轮旋转速度和传动旋转速度在预定范围内时,计算装置可以启动锁定机构。
116.冠词“一”、“一个”和“该”意在指在前面的描述中有一个或更多个元件。术语“包括”、“包含”和“具有”意在是包含性的并且指除了列出的元件之外,还可以存在其他元件。另外,应当理解的是,对本公开的“一个实施方式”或“实施方式”的引用不意在被解释为排除也包含所述特征的附加实施方式的存在。例如,关于本文的实施方式描述的任何元件可以与本文描述的任何其他实施方式的任何元件组合。如本公开的实施方式所包含的本领域普通技术人员所理解的,本文陈述的数字、百分比、比率或其他值意在包括该值以及与所述值“大约”或“近似”的其他值。因此,所述值应该被解释得足够宽泛以涵盖至少足够接近所述值的值,从而执行期望的功能或实现期望的结果。所述值至少包括在适合的制造或生产过程中预期的变化,并且可以包括在所述值的5%以内、1%以内、0.1%以内或0.01%以内的值。
117.鉴于本公开,本领域普通技术人员应当意识到的是,等同构造不背离本公开的精神和范围,并且在不背离本公开的精神和范围的情况下,可以对本文公开的实施方式做出各种改变、替代和变更。包括功能性“手段功能”条款的等同构造意在覆盖此处描述的执行所述功能的结构,包括以相同方式操作的结构等同物和提供相同功能的等同结构。申请人的明确意图是不对任何权利要求援引手段功能或其他功能性权利要求,除非“手段”一词与
相关功能一起出现。落入权利要求的含义和范围内的对实施方式的每个添加、删除和修改都将被权利要求所包含。
118.应该理解的是,前面描述中的任何方向或参照框架仅是相对方向或运动。例如,对“前”和“后”或“顶”和“底”或“左”和“右”的任何参照仅是描述相关元件的相对位置或移动。
119.在不背离本公开的精神或特征的情况下,本公开可以以其他特定形式实施。所描述的实施方式被认为是说明性的而非限制性的。因此,本公开的范围由所附权利要求而不是由前面的描述来指示。在权利要求的等同物的含义和范围内的变化将包含在权利要求的范围内。
120.举例来说,根据本公开的蹬踏式传动系可以根据以下任何部分进行描述:
121.1.一种蹬踏式传动系,所述传动系包括:
122.传动机构;
123.轮,所述轮具有旋转轴线;
124.飞轮轮毂,所述飞轮轮毂将所述传动机构连接至所述轮,并且所述飞轮轮毂构造成将扭矩从所述传动机构围绕所述旋转轴线沿第一旋转方向传递至所述轮;以及
125.锁定机构,所述锁定机构具有锁定状态和解锁状态,所述锁定状态构造成将扭矩从所述传动机构围绕所述旋转轴线至少沿第二旋转方向传递至所述轮。
126.2.根本部分1所述的传动系,所述锁定机构包括摩擦离合器。
127.3.根本部分1所述的传动系,所述锁定机构包括沿所述旋转轴线的轴向方向定向的一个或更多个互锁机械特征。
128.4.根据部分1至3中的任一部分所述的传动系,所述锁定机构包括沿所述旋转轴线的径向方向定向的一个或更多个互锁机械特征。
129.5.根据部分1至4中的任一部分所述的传动系,所述锁定机构仅在所述锁定状态和所述解锁状态下是稳定的。
130.6.根据部分1至5中的任一部分所述的传动系,所述锁定机构包括电动马达,所述电动马达用以将所述锁定机构在所述锁定状态与所述解锁状态之间致动。
131.7.根据部分1至6中的任一部分所述的传动系,所述传动机构包括链。
132.8.根据部分1至7中的任一部分所述的传动系,所述轮为飞轮。
133.9.根据部分1至8中的任一部分所述的传动系,所述锁定机构具有倾斜表面和邻近所述倾斜表面定位的推杆,所述推杆在所述倾斜表面的第一端部处和所述倾斜表面的第二端部处是稳定的,其中,位于所述第一端部处的所述推杆与所述解锁状态相关联,并且位于所述第二端部处的所述推杆与所述锁定状态相关联。
134.10.根据部分9所述的传动系,所述推杆朝向所述第一端部偏置。
135.11.根据部分1至10中的任一部分所述的传动系,所述锁定机构具有第一部分和第二部分,通过使所述第一部分相对于所述第二部分旋转,所述锁定机构能够在所述锁定状态与所述解锁状态之间移动。
136.12.根据部分1至11中的任一部分所述的传动系,所述锁定机构具有中间状态,所述中间状态构造成在所述传动机构与所述轮之间传递扭矩的5%至95%。
137.13.一种循环系统,所述系统包括:
138.车架;
139.由所述车架支承的车把;
140.由所述车架支承的传动系,所述传动系包括:
141.传动机构,所述传动机构构造成接收来自使用者的输入扭矩;以及
142.根据权利要求1所述的传动系,其中,所述锁定状态构造成沿轮的第一旋转方向和第二旋转方向将所述输入扭矩的至少95%传递至所述轮,所述第二旋转方向与所述第一旋转方向相反。
143.14.根据部分13所述的系统,所述锁定机构能够由所述车把上的控制器致动。
144.15.根据部分1至12中的任一部分所述的传动系或根据部分13或14所述的系统,还包括:
145.与所述锁定机构进行数据通信的计算装置,所述计算装置配置成向电动马达发送命令以使所述锁定机构在所述锁定状态与所述解锁状态之间移动。
146.16.根据部分15所述的系统,所述计算装置与配置成测量所述轮的旋转的至少一个传感器进行数据通信。
147.17.根据部分15或16所述的系统,所述计算装置与配置成制动所述轮或所述传动系的安全制动器进行数据通信。
148.18.根据部分1至12中的任一部分所述的传动系或根据部分13至17所述的系统,所述锁定状态构造成传递至少300牛顿-米的扭矩。
149.19.根据部分1至12中的任一部分所述的传动系或根据部分13至18所述的系统的传动系还包括封锁装置,所述封锁装置构造成当所述锁定机构的轮构件和传动构件相对于彼此运动时防止所述锁定机构在所述锁定状态与所述解锁状态之间运动。
150.20.根据部分1至12中的任一部分所述的传动系或根据部分13至18所述的系统的传动系还包括封锁装置,所述封锁装置构造成:除非安全制动器与所述轮或所述传动系接合,否则防止所述锁定机构在所述锁定状态与所述解锁状态之间运动,。
151.21.一种在蹬踏式传动系中传递扭矩的方法,所述方法包括:
152.利用至少一个踏板接收第一输入力;
153.将所述第一输入力沿传动系的第一旋转方向转换成所述传动系中的第一输入扭矩;
154.将所述第一输入扭矩通过飞轮轮毂沿轮的第一旋转方向传递至所述轮;
155.将锁定机构从解锁状态移动至锁定状态,以将所述传动系的部件在旋转方向上固定至所述轮;
156.在所述至少一个踏板处接收第二输入力;
157.将所述第二输入力沿与所述传动系的所述第一旋转方向相反的所述传动系的第二旋转方向转换成所述传动系中的第二输入扭矩;以及
158.将所述第二输入扭矩通过所述锁定机构沿所述轮的所述第二旋转方向传递至所述轮。
159.22.根据部分21所述的方法,还包括:
160.将所述锁定机构移动至中间状态;
161.在所述中间状态下将第三输入扭矩的5%至95%从所述传动系传递至所述轮;以及
162.在传动系转动速度在轮转动速度的5%以内之后,将所述锁定机构移动至所述锁定状态。
163.23.根据部分21或22所述的方法,将锁定机构从解锁状态移动至锁定状态包括致动电动马达。
164.24.根据部分21至23中的任一部分所述的方法,将锁定机构从解锁状态移动至锁定状态包括将所述锁定机构的至少一个部件沿所述轮的旋转轴线的轴向方向移动。
165.25.根据部分21至24中的任一部分所述的方法,将锁定机构从解锁状态移动至锁定状态包括将所述锁定机构的至少一个部件沿所述轮的旋转轴线的轴向方向移动。
166.26.根据部分21至25中的任一部分所述的方法,还包括将所述锁定机构的轮构件相对于所述轮移动,所述轮构件相对于所述轮在旋转方向上固定。
167.27.根据部分21至26中的任一部分所述的方法,还包括将所述锁定机构的传动构件沿相对于所述轮的旋转轴线的轴向方向移动,所述传动构件相对于所述传动系的部件在旋转方向上固定。
168.28.根据部分21至27中的任一部分所述的方法,还包括将所述锁定机构的传动构件沿相对于所述轮的旋转轴线的径向方向移动,所述传动构件相对于所述传动系的部件在旋转方向上固定。
169.29.根据部分21至28中的任一部分所述的方法,将锁定机构从解锁状态移动至锁定状态包括以摩擦的方式接合所述锁定机构的轮构件和传动构件,所述轮构件相对于所述轮在旋转方向上固定,并且所述传动构件相对于所述传动系的部件在旋转方向上固定。
170.30.根据部分21至29中的任一部分所述的方法,将锁定机构从解锁状态移动至锁定状态包括以流体的方式接合所述锁定机构的轮构件和传动构件,所述轮构件相对于所述轮在旋转方向上固定,并且所述传动构件相对于所述传动系的部件在旋转方向上固定。
171.31.根据部分21至30中的任一部分所述的方法,还包括从计算装置向所述锁定机构发送命令以将所述锁定机构从解锁状态移动至锁定状态。
172.32.根据部分21至31中的任一部分所述的方法,从计算装置发送命令包括将移动所述锁定机构与呈现给用户的锻炼程序相协调。
173.33.根据部分21至32中的任一部分所述的方法,还包括在显示器上向用户显示锻炼程序。
174.34.根据部分21至33中的任一部分所述的方法,还包括接合封锁装置,所述封锁装置在所述轮旋转时防止所述锁定机构从解锁状态移动至锁定状态。
175.35.根据部分21至34中的任一部分所述的方法,还包括接合封锁装置,当所述锁定机构的轮构件以大于预定阈值的速度相对于所述锁定机构的传动构件旋转时,所述封锁装置防止所述锁定机构从解锁状态移动至锁定状态,所述轮构件相对于所述轮在旋转方向上固定,并且所述传动构件相对于所述传动系的部件在旋转方向上固定。
176.36.根据部分21至35中的任一部分所述的方法,还包括在将锁定机构从解锁状态移动至锁定状态之前接合制动器以使所述轮的旋转停止。
177.37.根据部分21至36中的任一部分所述的方法,还包括接合封锁装置,所述封锁装置在所述制动器接合时仅允许将所述锁定机构从解锁状态移动至锁定状态。
178.38.根据部分21至37中的任一部分所述的方法,还包括:
179.测量所述轮围绕所述旋转轴线的轮旋转速度和所述传动系围绕所述旋转轴线的传动旋转速度;以及
180.接合封锁装置,所述封锁装置在所述轮旋转速度与所述传动旋转速度相差多于10%时防止所述锁定机构从解锁状态移动至锁定状态。
181.39.根据部分38所述的方法,还包括:
182.测量来自使用者的在所述传动系的踏板处的转换输入力;以及
183.接合封锁装置,所述封锁装置在所述转换输入力大于1磅(4.45牛顿)时防止所述锁定机构从解锁状态移动至锁定状态。
184.40.根据部分39所述的方法,还包括:
185.在将所述第二输入扭矩通过所述锁定机构沿所述第二旋转方向传递之后,将锁定机构从锁定状态移动至解锁锁定状态,以将所述传动系的所述部件与所述轮在旋转方向上断开联接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1