一种肌肉萎缩患者助于手臂恢复装置的制作方法
1.本发明涉及一种恢复装置,尤其涉及一种肌肉萎缩患者助于手臂恢复装置。
背景技术:
2.目前,因疾病或外伤导致患者的神经系统或肌肉骨骼系统损伤,通常为造成人肢活动障碍,活动减少后造成患者肌肉萎缩、关节僵硬,这时只能通过康复锻炼来促进肢体恢复。
3.现有技术中的助于手臂恢复装置,一般包括有支撑板、第一支撑架、拉绳、承重块和第一回力弹簧,支撑板顶部左右两侧均设有第一支撑架,两个第一支撑架内均滑动式设有承重块,两个承重块顶部均设有拉绳,两个拉绳贯穿同侧第一支撑架,两个承重块与同侧第一支撑架之间均设有第一回力弹簧,患者拉动拉绳带动承重块向上侧移动,第一回力弹簧被压缩,接着人们松开拉绳,在第一回力弹簧的复位作用下,承重块带动拉绳向下侧移动复位,如此反复实行操作,便可锻炼患者手臂,促进手臂恢复,但是该装置无法在患者进行康复锻炼时,对患者当天锻炼的次数进行统计,使得患者无法制定锻炼表,从而患者盲目的进行锻炼,导致锻炼效果不佳。
4.因此,鉴于上述问题提供一种能够对患者锻炼的次数进行统计,便于缓和根据规定的次数进行康复锻炼的肌肉萎缩患者助于手臂恢复装置。
技术实现要素:
5.为了克服现有的手臂恢复装置无法在患者进行康复锻炼时,对患者当天锻炼的次数进行统计,使得患者无法制定锻炼表,从而患者盲目的进行锻炼,导致锻炼效果不佳的缺点,本发明的目的是提供一种能够对患者锻炼的次数进行统计,便于缓和根据规定的次数进行康复锻炼的肌肉萎缩患者助于手臂恢复装置。
6.为了解决上诉问题,本发明是通过以下技术方案实现的:一种肌肉萎缩患者助于手臂恢复装置,包括:支撑板顶部设有第一支撑杆;第一支撑架,支撑板顶部左右两侧均设有第一支撑架;第一转轴,两个第一支撑架上部均转动式设有第一转轴,两个第一转轴均与第一支撑杆转动配合;单向绕线轮,两个第一转轴内端均设有单向绕线轮;承重块,两个第一支撑架内均滑动式设有承重块;拉绳,两个承重块顶部均设有拉绳,两个拉绳贯穿同侧第一支撑架,且两个拉绳绕接在同侧单向绕线轮上;第一回力弹簧,两个承重块与同侧第一支撑架之间均设有第一回力弹簧;计数机构,支撑板顶部后侧设有计数机构,计数机构与两个第一转轴配合;调节机构,计数机构上部设有调节机构,调节机构与计数机构配合。
7.作为上述方案的改进,计数机构包括:单向缺齿轮,两个第一转轴上均设有单向缺齿轮,单向缺齿轮位于单向绕线轮外端;第一支撑块,支撑板顶部后端左右两侧均设有第一支撑块;第二支撑架,两个第一支撑块上部之间设有第二支撑架;滑块,第二支撑架上部左右两侧均滑动式设有滑块;齿条杆,两个滑块前侧均滑动式齿条杆;第三回力弹簧,两个齿条杆与同侧滑块之间均设有四个第三回力弹簧;第二回力弹簧,两个滑块与第二支撑架之间均设有第二回力弹簧;第二支撑杆,第二支撑架左右两侧均设有第二支撑杆;第二转轴,两个第二支撑杆内端均转动式设有第二转轴;单向齿轮,两个第二转轴上均设有单向齿轮,两个单向齿轮与同侧齿条杆相啮合;计数表,两个第二转轴内侧均设有计数表,两个计数表与同侧第一支撑块转动配合。
8.作为上述方案的改进,调节机构包括:第三支撑架,两个第一支撑块上部之间设有第三支撑架;防护壳,第三支撑架前侧设有防护壳,两个第二转轴贯穿防护壳;棘齿轮,两个第二转轴内端均设有棘齿轮;第一压杆,防护壳内设有滑杆,滑杆上滑动式设有第一压杆;棘齿条,第一压杆左右两侧均设有棘齿条,两个棘齿条与同侧棘齿轮相配合;第一复位弹簧,第一压杆与防护壳之间设有第一复位弹簧。
9.作为上述方案的改进,还包括有复位机构,复位机构包括:两个第一转轴上均设有限位环;支撑环,第一支撑杆上部左右两侧均设有支撑环;限位环,两个支撑环外侧均设有限位环;发条,两个限位环内部均设有发条,两个发条绕接在同侧第一转轴上。
10.作为上述方案的改进,还包括有夹紧机构,夹紧机构包括:第二支撑块,第一支撑杆上部设有第二支撑块,两个拉绳与第二支撑块滑动配合;夹块,第二支撑块左右两侧均通过螺栓设有夹块,用于对拉绳进行限位。
11.作为上述方案的改进,还包括有检测机构,检测机构包括:楔形块,两个承重块后侧均设有楔形块;第四支撑架,支撑板顶部后端设有第四支撑架,第四支撑架与第一支撑杆连接;导向杆,第四支撑架左右对称滑动式设有两个导向杆;楔形杆,同侧的两个导向杆之间设有楔形杆,两个楔形杆与同侧楔形块接触配合;第二复位弹簧,两个楔形杆与第四支撑架之间均设有两个第二复位弹簧,同侧的两个第二复位弹簧分别绕接在同侧导向杆上;第二压杆,两个楔形杆上部外侧均设有第二压杆;限位板,第四支撑架上部前端左右两侧均设有限位板,两个限位板与同侧第二压杆滑动配合;
第五支撑架,两个第一支撑架中部均设有第五支撑架;炫彩灯,两个第五支撑架内部均安装有三个炫彩灯;开关,同侧的三个炫彩灯后端均滑动式设有开关,同侧的三个开关与同侧第五支撑架滑动配合,两个第二压杆与同侧的三个开关滑动配合。
12.作为上述方案的改进,还包括有乘坐机构,乘坐机构包括:限位架,支撑板顶部前侧滑动式设有限位架;螺杆,限位架内上部螺纹式设有螺杆;坐垫,螺杆顶部设有坐垫;调节环,螺杆下部设有调节环,调节环与限位架转动配合。
13.作为上述方案的改进,坐垫为海棉材质。
14.与现有技术相比,本发明的有益效果是:1、通过患者拉动拉绳带动承重块进行移动,使得计数表转动一格,数值随着计数表转动而变化,如此便可对患者锻炼的次数进行统计,便于患者根据每天规定的次数进行康复锻炼;2、第一转轴转动带动限位环转动,发条发生形变,患者在松开拉绳时,在发条的复位作用下,限位环带动第一转轴反向转动复位,第一转轴带动绕线轮转动,绕线轮便辅助拉绳进行移动,如此便可辅助拉绳进行复位;3、在正常状态下,夹块与第二支撑块是对拉绳进行限位的,使得拉绳无法随意移动,控制拉绳移动的位置;4、通过患者拉动承重块的力量越大,相对应的炫彩灯亮起,从而知晓患者手臂的力量,进而判断患者手臂恢复情况;5、患者可就坐在坐垫上,通过坐垫是患者更好的进行锻炼工作,同时可对不同高度的患者进行调节坐垫的高度。
附图说明
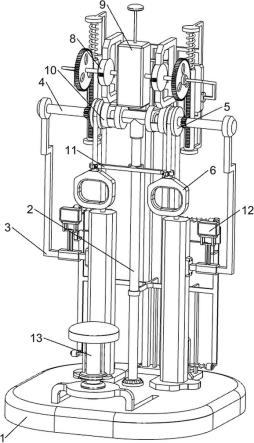
15.图1为本发明的立体结构示意图。
16.图2为本发明的局部剖视图。
17.图3为本发明的计数机构第一种立体结构示意图。
18.图4为本发明的计数机构第二种立体结构示意图。
19.图5为本发明的计数机构部分剖视图。
20.图6为本发明的调节机构第一种部分立体结构示意图。
21.图7为本发明的调节机构第二种部分立体结构示意图。
22.图8为本发明的调节机构立体结构示意图。
23.图9为本发明的复位机构第一种立体结构示意图。
24.图10为本发明的复位机构第二种立体结构示意图。
25.图11为本发明的卡位机构立体结构示意图。
26.图12为本发明的检测机构立体结构示意图。
27.图13为本发明的检测机构部分立体结构示意图。
28.图14为本发明的检测机构部分剖视图。
29.图15为本发明的乘坐机构立体结构示意图。
30.其中:1:支撑板,2:第一支撑杆,3:第一支撑架,4:第一转轴,5:单向绕线轮,6:拉绳,61:承重块,7:第一回力弹簧,8:计数机构,80:单向缺齿轮,81:第二支撑架,82:齿条杆,83:第二回力弹簧,84:滑块,85:第二支撑杆,86:第二转轴,87:单向齿轮,88:第一支撑块,89:计数表,810:第三回力弹簧,9:调节机构,90:第三支撑架,91:防护壳,92:棘齿轮,93:棘齿条,94:第一压杆,95:第一复位弹簧,10:复位机构,100:限位环,101:支撑环,102:发条,11:夹紧机构,110:第二支撑块,111:夹块,112:螺栓,12:检测机构,120:楔形块,121:第四支撑架,122:楔形杆,123:导向杆,124:第二复位弹簧,125:第二压杆,126:限位板,127:第五支撑架,128:炫彩灯,129:开关,13:乘坐机构,130:限位架,131:调节环,132:螺杆,133:坐垫。
具体实施方式
31.以下结合具体实施例对上述方案做进一步说明。应理解,这些实施例是用于说明本技术而不限于限制本技术的范围。实施例中采用的实施条件可以根据具体厂家的条件做进一步调整,未注明的实施条件通常为常规实验中的条件。
32.实施例1一种肌肉萎缩患者助于手臂恢复装置,如图1-图8所示,包括有支撑板1、第一支撑杆2、第一支撑架3、第一转轴4、单向绕线轮5、拉绳6、承重块61、第一回力弹簧7、计数机构8和调节机构9,支撑板1顶部设有第一支撑杆2,支撑板1顶部左右两侧均设有第一支撑架3,两个第一支撑架3上部均转动式设有第一转轴4,两个第一转轴4均与第一支撑杆2转动配合,两个第一转轴4内端均设有单向绕线轮5,两个第一支撑架3内均滑动式设有承重块61,两个承重块61顶部均设有拉绳6,两个拉绳6贯穿同侧第一支撑架3,且两个拉绳6绕接在同侧单向绕线轮5上,两个承重块61与同侧第一支撑架3之间均设有第一回力弹簧7,支撑板1顶部后侧设有计数机构8,用于计算患者锻炼次数,计数机构8与两个第一转轴4配合,计数机构8上部设有调节机构9,用于调节计数机构8数值,调节机构9与计数机构8配合。
33.当肌肉萎缩患者需要进行手臂锻炼时,患者先就站在支撑板1上方,接着拉动拉绳6沿单向绕线轮5向上侧进行移动,拉绳6移动过程中带动单向绕线轮5转动,单向绕线轮5便可辅助拉绳6进行移动,拉绳6带动承重块61沿第一支撑架3向上侧移动,第一回力弹簧7被压缩,同时单向绕线轮5带动第一转轴4转动,第一转轴4带动计数机构8转动,计数机构8每转动一圈便可记录患者当天锻炼次数,随之患者不再对拉绳6施加力,在第一回力弹簧7的复位作用下,承重块61带动拉绳6沿单向绕线轮5向下侧移动,单向绕线轮5空转,第一转轴4不做出反应,患者如此反复实行操作,便可锻炼手臂感知能力,患者在锻炼工作完成后,人们可推动调节机构9向下侧移动,从而调节机构9带动计数机构8反转,从而将计数机构8数值调整为初始状态,接着患者便走出支撑板1上方,最终便可实现肌肉萎缩患者进行康复训练,提高手臂感知能力,使得患者能够加速恢复手臂。
34.如图3、图4、图5和图6所示, 计数机构8包括有单向缺齿轮80、第二支撑架81、齿条杆82、第二回力弹簧83、滑块84、第二支撑杆85、第二转轴86、单向齿轮87、第一支撑块88、计数表89和第三回力弹簧810,两个第一转轴4上均设有单向缺齿轮80,单向缺齿轮80位于单向绕线轮5外端,支撑板1顶部后端左右两侧均设有第一支撑块88,两个第一支撑块88上部之间设有第二支撑架81,第二支撑架81上部左右两侧均滑动式设有滑块84,两个滑块84前
侧均滑动式齿条杆82,两个齿条杆82与同侧滑块84之间均设有四个第三回力弹簧810,两个滑块84与第二支撑架81之间均设有第二回力弹簧83,第二支撑架81左右两侧均设有第二支撑杆85,两个第二支撑杆85内端均转动式设有第二转轴86,两个第二转轴86上均设有单向齿轮87,两个单向齿轮87与同侧齿条杆82相啮合,两个第二转轴86内侧均设有计数表89,用于统计患者锻炼次数,两个计数表89与同侧第一支撑块88转动配合,计数表89前侧开有通孔,用于患者观看锻炼次数。
35.当需要对患者锻炼的次数进行统计时,人们拉动拉绳6带动承重块61向上侧移动,使得拉绳6带动单向绕线轮5及第一转轴4转动,第一转轴4转动带动单向缺齿轮80转动,单向缺齿轮80带动齿条杆82通过滑块84向上侧移动三齿,第二回力弹簧83被轻微压缩,齿条杆82带动单向齿轮87轻微转动,单向齿轮87便带动第二转轴86轻微转动,第二转轴86带动计数表89轻微转动,使得计数表89转动一格,数值随着计数表89转动而变化,患者可通过计数表89上的通孔观看数值的变化,从而患者知晓自身锻炼的次数,单向缺齿轮80转动至不再与齿条杆82接触,在第二回力弹簧83的复位作用下,滑块84带动齿条杆82向下侧移动复位,齿条杆82向下侧移动与单向齿轮87接触,单向齿轮87空转,第二转轴86不做出反应,第三回力弹簧810起到缓冲作用,接着人们便不再对拉绳6施加力,在第一回力弹簧7的复位作用下,承重块61带动拉绳6向下侧移动复位,这时单向绕线轮5空转,第一转轴4不做出反应,最终便可实现对患者锻炼的次数进行统计,便于患者根据每天规定的次数进行康复锻炼的目的。
36.如图6、图7和图8所示,调节机构9包括有第三支撑架90、防护壳91、棘齿轮92、棘齿条93、第一压杆94和第一复位弹簧95,两个第一支撑块88上部之间设有第三支撑架90,第三支撑架90前侧设有防护壳91,两个第二转轴86贯穿防护壳91,两个第二转轴86内端均设有棘齿轮92,防护壳91内设有滑杆,滑杆上滑动式设有第一压杆94,第一压杆94左右两侧均设有棘齿条93,两个棘齿条93与同侧棘齿轮92相配合,第一压杆94与防护壳91之间设有第一复位弹簧95。
37.当患者锻炼工作完成后,便要对计数表89进行调整数值,便于下次进行使用,人们推动第一压杆94带动棘齿条93向下侧移动,第一复位弹簧95被压缩,棘齿条93向下侧移动与棘齿轮92接触,棘齿条93便带动棘齿轮92转动,棘齿轮92第二转轴86转动,第二转轴86带动计时器反向转动,从而将计数器数值调整为零,同时第二转轴86带动单向齿轮87反向转动,单向齿轮87与齿条杆82接触,齿条杆82便向后侧移动,第三回力弹簧810被压缩,调节工作完成后,人们便不再对第一压杆94施加力,在第一复位弹簧95的复位作用下,第一压杆94带动棘齿条93向上侧移动复位,棘齿轮92不做出反应,随之单向齿轮87停止转动,在第三回力弹簧810的复位作用下,齿条杆82向前侧移动复位,最终便可实现对计数表89进行调整数值,便于下次使用的目的。
38.实施例2在实施例1的基础之上,如图1、图9、图10、图11、图12、图13、图14和图15所示,还包括有复位机构10,复位机构10包括有限位环100、支撑环101和发条102,第一支撑杆2上部左右两侧均设有支撑环101,两个支撑环101均设有限位环100,两个限位环100内部均设有发条102,两个发条102绕接在同侧第一转轴4上。
39.当需要辅助承重块61进行复位时,拉绳6沿单向绕线轮5向下侧移动,单向绕线轮5
带动第一转轴4转动,发条102发生形变,接着人们不再对拉绳6施加力时,在发条102的复位作用下,第一转轴4带动单向绕线轮5反向转动,从而单向绕线轮5辅助拉绳6进行移动,拉绳6便放松,同时单向缺齿轮80与齿条杆82接触,进而齿条杆82向后侧移动,第三回力弹簧810被压缩,齿条杆82便不会与单向缺齿轮80接触,随之在第一回力弹簧7的复位作用下,承重块61带动拉绳6向下侧移动复位,接着第一转轴4停止转动,单向缺齿轮80便不再转动,在第三回力弹簧810的复位作用下,齿条杆82向前侧移动复位,最终便可实现辅助拉绳6进行复位的目的。
40.如图11所示,还包括有夹紧机构11,夹紧机构11包括有第二支撑块110、夹块111和螺栓112,第一支撑杆2上部设有第二支撑块110,两个拉绳6与第二支撑块110滑动配合,第二支撑块110左右两侧均通过螺栓112设有夹块111,用于对拉绳6进行限位。
41.当需要对拉绳6进行限位时,在正常状态下,夹块111与第二支撑块110是对拉绳6进行限位的,从而能够防止拉绳6随意移动,如若需要对拉绳6进行更换,人们可转动螺栓112与第二支撑块110脱离接触,接着将夹块111取下,使得夹块111不会对拉绳6进行限位,这时人们便可将拉绳6进行更换,更换工作完成后,人们便将夹块111安装回第二支撑块110上,并反向转动螺栓112,使得螺栓112与第二支撑块110接触,进而对夹块111进行卡紧,使得夹块111与第二支撑块110对拉绳6进行限位,最终便可实现对拉绳6进行限位的目的。
42.如图12、图13和图14所示,还包括有检测机构12,检测机构12包括有楔形块120、第四支撑架121、楔形杆122、导向杆123、第二复位弹簧124、第二压杆125、限位板126、第五支撑架127、炫彩灯128和开关129,两个承重块61后侧均设有楔形块120,支撑板1顶部后端设有第四支撑架121,第四支撑架121与第一支撑杆2连接,第四支撑架121左右对称滑动式设有两个导向杆123,同侧的两个导向杆123之间设有楔形杆122,两个楔形杆122与同侧楔形块120接触配合,两个楔形杆122与第四支撑架121之间均设有两个第二复位弹簧124,同侧的两个第二复位弹簧124分别绕接在同侧导向杆123上,两个楔形杆122上部外侧均设有第二压杆125,第四支撑架121上部前端左右两侧均设有限位板126,两个限位板126与同侧第二压杆125滑动配合,两个第一支撑架3中部均设有第五支撑架127,两个第五支撑架127内部均安装有三个炫彩灯128,同侧的三个炫彩灯128后端均滑动式设有开关129,同侧的三个开关129与同侧第五支撑架127滑动配合,两个第二压杆125与同侧的三个开关129滑动配合。
43.当需要检测患者进行康复锻炼后手臂的力量时,根据患者拉动拉绳6带动承重块61向上侧移动,承重块61带动楔形块120向上侧移动,楔形块120挤压楔形杆122,使得楔形杆122和导向杆123向外侧移动,第二复位弹簧124被压缩,楔形杆122带动第二压杆125沿限位板126向外侧移动,第二压杆125对内端第一个开关129进行挤压,使得第五支撑架127内端第一个炫彩灯128打开,患者可根据三个炫彩灯128亮起的情况,从而知晓自身手臂力量,通过患者拉动承重块61的力量越大,使得不同程度的炫彩灯128亮起,当承重块61带动楔形块120向下侧移动复位时,楔形块120便不再与楔形杆122接触,在第二复位弹簧124的复位作用下,楔形杆122带动第二压杆125向内侧移动复位,第二压杆125便不对开关129挤压,使得炫彩灯128关闭,最终便可实现根据患者拉动承重块61的力量,使得炫彩灯128亮起,通过炫彩灯128亮起的情况,从而知晓患者手臂的力量,进而判断患者手臂恢复情况。
44.如图15所示,还包括有乘坐机构13,乘坐机构13包括有限位架130、调节环131、螺
杆132和坐垫133,支撑板1顶部前侧滑动式设有限位架130,限位架130内上部螺纹式设有螺杆132,螺杆132顶部设有坐垫133,坐垫133为海棉材质,患者就坐在坐垫133上时,能够更加舒适,螺杆132下部设有调节环131,调节环131与限位架130转动配合。
45.当患者在进行康复锻炼时,可就坐在坐垫133上,坐垫133为海棉材质,使得患者能够更加舒适就坐在坐垫133上,患者可通过转动调节环131带动螺杆132向上侧移动,螺杆132带动坐垫133向上侧移动,从而调节坐垫133的高度,便于不同高度的患者进行使用,当患者康复锻炼工作完成后,患者便反向转动调节环131带动螺杆132反向转动,使得螺杆132带动坐垫133向下侧移动复位,最终便可实现对坐垫133进行调节高度,便于不同高度的患者进行就坐的目的。
46.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1