一种医疗用肢体骨骼辅助恢复设备的制作方法
1.本发明涉及一种骨骼辅助恢复设备,尤其涉及一种医疗用肢体骨骼辅助恢复设备。
背景技术:
2.在医院内,骨科病人在进行恢复时,都是靠着时间自行治愈的,这样的恢复速度较慢,而规律化的锻炼有助于提高骨骼恢复效率。
3.专利申请号为cn201921742174x的专利公开了一种肢体恢复辅助训练装置,包括座椅、四组支腿、靠背、两组扶手、转动板和踏板,座椅的底端左前侧、左后侧、右前侧和右后侧分别与四组支腿的顶端连接,座椅的顶端左侧与靠背的底端连接,两组扶手的左端分别安装在靠背的右端前侧和后侧,转动板的顶端与座椅的右端可转动连接,转动板的底端与踏板的左端连接;还包括安装平台、安装板、第一电机、减速器、传动轴、联轴器、两组支撑板、丝杠、转动块、导轨、滑块、移动块和第一支撑杆,安装平台位于四组支腿之间,安装平台的前端左侧、前端右侧、后端左侧和后端右侧分别与四组支腿的内端下侧连接,安装平台的顶端左侧与安装板的底端连接,安装板的顶端与第一电机的底端连接,第一电机的右端与减速器的左端连接,减速器的右端与传动轴的左端连接,传动轴的右端与联轴器的左端连接,两组支撑板均位于减速器的右方,两组支撑板的底端分别安装在安装平台的顶端左侧和右侧,丝杠的左端与联轴器的右端连接,丝杠的右端穿过左侧支撑板并与转动块的左端可转动连接,丝杠的左侧外壁与左侧支撑板可转动连接,转动块的右端与右侧支撑板的左端连接,导轨位于两组支撑板之间,导轨的底端安装在安装平台的顶端,导轨的顶端与滑块的底端可滑动连接,滑块的顶端与移动块的底端连接,移动块的中部设置有左右贯穿的第一螺纹孔,移动块通过第一螺纹孔螺装套设在丝杠上,移动块的顶端与第一支撑杆的底端连接,第一支撑杆的顶端可转动设置有调整装置,调整装置的右端可转动内设置有第二支撑杆,第二支撑杆的右端设置有固定块,固定块的右端与转动板的左端下侧连接。上述专利通过带动人体腿部进行弯曲运行,可有效延长训练时间,提高训练效果,同时可对转动板转动角度进行控制,从而调整腿部弯曲程度,提高训练效果,提高实用性和可靠性,上述专利虽然能够实现腿部的训练,但是功能比较单一,不能对上肢进行锻炼,且不能根据需要进行负重调节,稳定性较差,容易造成二次伤害。
4.因此,特别需要设计一种能够对上肢进行锻炼、可自动固定和选择负重的医疗用肢体骨骼辅助恢复设备,以解决现有技术中存在的问题。
技术实现要素:
5.针对现有技术的不足,本发明提供一种能够对上肢进行锻炼、可自动固定和选择负重的医疗用肢体骨骼辅助恢复设备,以克服现有恢复装置功能比较单一,不能对上肢进行锻炼,且不能根据需要进行负重调节,稳定性较差,容易造成二次伤害的缺点。
6.为实现以上目的,本发明通过以下方案予以实现:一种医疗用肢体骨骼辅助恢复
设备,包括有:底架和支架,底架上部左侧设有支架;转盘,支架前后两侧均转动式设有转盘;上肢摆动机构,底架、支架和转盘之间连接有帮助上肢进行负重摆动的上肢摆动机构;握块,上肢摆动机构上设有两个供人们手握的握块;卡位机构,底架和支架之间设有对上肢摆动机构进行卡位的卡位机构;稳定机构,底架上设有稳定底架的稳定机构。
7.作为上述方案的改进,上肢摆动机构包括有:第一连接柱,两个转盘右侧均设有第一连接柱;第一转杆,两个第一连接柱上均转动式设有第一转杆;扶杆,两个第一转杆上对称设有扶杆,扶杆与握块连接;第一导向杆,底架上左部前后两侧均设有第一导向杆;加重块,两个第一导向杆之间滑动式设有七个对负重锻炼提供重力的加重块;缓冲块,两个第一导向杆上均滑动式设有七个缓冲块,缓冲块有十四个,每两个加重块之间都有两个缓冲块,最下侧的两个缓冲块位于底架和最下侧的加重块之间;第一转轴,支架内上部前后两侧均转动式设有第一转轴;第一导向轮,两个第一转轴下侧均设有第一导向轮;第一连接块,两个转盘左侧均设有第一连接块;第一拉绳,两个第一连接块上均设有第一拉绳;支撑块,支架内上部前后两侧均设有支撑块;第二转轴,两个支撑块之间转动式设有第二转轴;第二导向轮,第二转轴上前后两侧均设有第二导向轮;导向架,支架内上侧设有导向架;拉块,七个加重块之间滑动式设有拉块,两个第一拉绳均绕过同侧的第一导向轮和同侧的第二导向轮并穿过导向架与拉块连接。
8.作为上述方案的改进,卡位机构包括有:固定块,支架上侧均匀设有四个固定块;第一滑杆,固定块与底架之间连接有第一滑杆,第一滑杆有四个;第一移动架,四个第一滑杆之间滑动式设有第一移动架;拉环,第一移动架上滑动式设有拉环;第二连接块,拉环右部均匀设有三个第二连接块,第二连接块与第一移动架滑动式连接;卡块,三个第二连接块之间连接有将拉块卡住的卡块,卡块与拉块接触;第二导向杆,第一移动架左右两侧均设有第二导向杆;手推块,两个第二导向杆之间滑动式设有手推块;第一伸缩杆,第一移动架内左侧均匀设有三组第一伸缩杆,每两个第一伸缩杆为一组,第一伸缩杆有六个;限位块,每两个第一伸缩杆之间连接有限位块,限位块有三个,三个限位块均与手
推块连接,限位块与相邻的第二连接块接触;第一弹簧,限位块后部上下两侧与第一移动架之间均连接有第一弹簧,第一弹簧有六个,第一弹簧绕在第一伸缩杆上。
9.作为上述方案的改进,稳定机构包括有:安装架,底架内底部中间设有安装架;第三连接块,安装架上部左侧滑动式设有第三连接块;第二滑杆,安装架上部右侧滑动式设有第二滑杆;盛重板,第二滑杆和第三连接块上部之间连接有供人们坐的盛重板;第二弹簧,盛重板下部右侧与安装架之间连接有第二弹簧,第二弹簧绕在第二滑杆上;支撑板,底架内底部前后两侧均设有支撑板;移动板,第三连接块下部设有移动板,移动板与安装架滑动式连接;第三伸缩杆,底架内底部中间设有第三伸缩杆;下移板块,第三伸缩杆上部设有下移板块,下移板块与安装架滑动式连接;第四弹簧,下移板块与第三伸缩杆之间连接有第四弹簧,第四弹簧绕在第三伸缩杆上;第三滑杆,下移板块上部均匀设有八个第三滑杆,移动板与第三滑杆滑动式连接;第三弹簧,移动板与下移板块之间连接有八个第三弹簧,第三弹簧绕在第三滑杆上;限位杆,下移板块前后两侧均设有限位杆;下压板,两个限位杆下侧均设有下压板,下压板与安装架滑动式连接;吸盘,两个下压板外侧均均匀设有三个对地面进行吸附的吸盘,吸盘有六个,吸盘与同侧的支撑板滑动式连接;第二伸缩杆,底架内上部前后两侧均设有两个第二伸缩杆,第二伸缩杆有四个,第二伸缩杆与同侧的下压板连接。
10.作为上述方案的改进,还包括有对吸盘增加压力的吸附增强机构,吸附增强机构包括有:压块,移动板左侧设有压块,压块与安装架滑动式连接;连接架,安装架下侧滑动式设有连接架;固定架,底架内上部左侧设有固定架;气筒,固定架与底架之间连接有气筒;第四滑杆,固定架右部前后两侧均设有第四滑杆;推动架,两个第四滑杆之间滑动式设有推动架;第五弹簧,推动架左部前后两侧与固定架之间均连接有第五弹簧,第五弹簧绕在第四滑杆上;第四伸缩杆,底架上部前后两侧均设有第四伸缩杆,两个第四伸缩杆均与连接架连接;连接板,连接架上转动式设有连接板,连接板与推动架转动式连接;第二连接柱,推动架左部中间设有第二连接柱,第二连接柱与气筒滑动式连接;
挤块,第二连接柱左部设有挤块,挤块与气筒滑动式连接;导气管,气筒与六个吸盘之间连接有导气管。
11.作为上述方案的改进,还包括有锻炼下肢骨骼的下肢恢复机构,下肢恢复机构包括有:丝杆,底架右侧与安装架之间转动式设有丝杆;手柄,丝杆右侧设有手柄;第二移动架,丝杆上螺纹式设有第二移动架;第五滑杆,第二移动架内设有第五滑杆;滑动架,第五滑杆与第二移动架之间滑动式设有滑动架;第六弹簧,滑动架与第二移动架之间连接有第六弹簧,第六弹簧绕在第五滑杆上;限制杆,滑动架前后两侧均设有两个限制杆。
12.作为上述方案的改进,还包括有锻炼背部骨骼的上肢移动机构,上肢移动机构包括有:第二转杆,支架上侧转动式设有第二转杆;摆杆,第二转杆上设有摆杆;第七弹簧,摆杆左右两侧与支架之间均连接有第七弹簧,第七弹簧绕在第二转杆上;第二拉绳,摆杆前后两侧均设有第二拉绳。
13.作为上述方案的改进,气筒上部左侧设有通气管。
14.相比现有技术,本发明的优点在于:1、本发明通过人们根据自身需求,将卡块卡在拉块相应的位置上,当人们手动转动握块时,从而使得转盘转动,使得第一拉绳拉动拉块和加重块向上移动,进而卡块向上移动,以此实现了负重的效果;2、当人们坐在盛重板上,在人们重力的作用下,盛重板向下移动,从而使得下压板和吸盘向下移动,使得吸盘吸在地面上,以此实现了稳定的效果,避免了在恢复锻炼的过程中底架和支架晃动;3、通过人们根据需要转动手柄转动,从而使得丝杆转动,使得第二移动架向左移动,当移动至合适位置时,人们停止转动手柄,随后人们将脚放置在同侧的两个限制杆之间,然后人们向上移动脚,从而使得滑动架向上移动,以此实现了锻炼下肢骨骼的效果。
附图说明
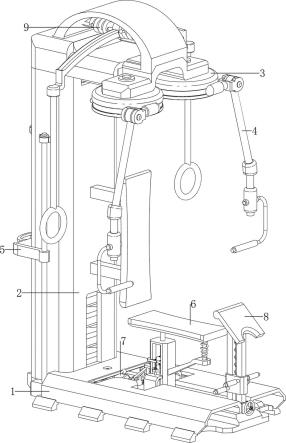
15.图1为本发明的立体结构示意图。
16.图2为本发明的剖视立体结构示意图。
17.图3为本发明的上肢摆动机构第一视角剖视立体结构示意图。
18.图4为本发明的上肢摆动机构第二视角剖视立体结构示意图。
19.图5为本发明的卡位机构立体结构示意图。
20.图6为本发明的卡位机构第一视角剖视立体结构示意图。
21.图7为本发明的卡位机构第二视角剖视立体结构示意图。
22.图8为本发明的a处放大立体结构示意图。
23.图9为本发明的稳定机构立体结构示意图。
24.图10为本发明的稳定机构剖视立体结构示意图。
25.图11为本发明的b处放大体结构示意图。
26.图12为本发明的吸附增强机构第一视角剖视立体结构示意图。
27.图13为本发明的吸附增强机构第二视角剖视立体结构示意图。
28.图14为本发明的下肢恢复机构剖视立体结构示意图。
29.图15为本发明的上肢移动机构剖视立体结构示意图。
30.以上附图中:1:底架,2:支架,3:转盘,4:上肢摆动机构,41:第一连接柱,42:第一转杆,43:扶杆,44:握块,45:加重块,46:第一导向杆,47:缓冲块,48:第一转轴,49:第一导向轮,410:第一连接块,411:第一拉绳,412:支撑块,413:第二导向轮,414:导向架,415:拉块,416:第二转轴,5:卡位机构,51:固定块,52:第一滑杆,53:第一移动架,54:拉环,55:第二连接块,56:卡块,57:手推块,58:第二导向杆,59:第一伸缩杆,510:第一弹簧,511:限位块,6:稳定机构,61:安装架,62:第二滑杆,63:第三连接块,64:盛重板,65:支撑板,66:下压板,67:吸盘,68:第二弹簧,69:第二伸缩杆,610:移动板,611:第三滑杆,612:第三弹簧,613:第三伸缩杆,614:下移板块,615:限位杆,616:第四弹簧,7:吸附增强机构,71:压块,72:第四伸缩杆,73:连接架,74:固定架,75:气筒,76:第五弹簧,77:第四滑杆,78:推动架,79:连接板,710:挤块,711:第二连接柱,712:导气管,8:下肢恢复机构,81:丝杆,82:手柄,83:第二移动架,84:第五滑杆,85:第六弹簧,86:滑动架,87:限制杆,9:上肢移动机构,91:第二转杆,92:第七弹簧,93:摆杆,94:第二拉绳。
具体实施方式
31.下面,结合附图以及具体实施方式,对本发明做进一步描述:实施例1一种医疗用肢体骨骼辅助恢复设备,现参考图1-2,包括有底架1、支架2、转盘3、握块44、上肢摆动机构4、卡位机构5和稳定机构6,底架1上部左侧焊接有支架2,支架2前后两侧均转动式设有转盘3,底架1、支架2和转盘3之间连接有上肢摆动机构4,上肢摆动机构4上设有两个握块44,底架1和支架2之间设有卡位机构5,底架1上设有稳定机构6。
32.现参考图3-7,上肢摆动机构4包括有第一连接柱41、第一转杆42、扶杆43、加重块45、第一导向杆46、缓冲块47、第一转轴48、第一导向轮49、第一连接块410、第一拉绳411、支撑块412、第二导向轮413、导向架414、拉块415和第二转轴416,两个转盘3右侧均设有第一连接柱41,两个第一连接柱41上均转动式设有第一转杆42,两个第一转杆42上对称设有扶杆43,扶杆43下部与握块44连接,底架1上左部前后两侧均设有第一导向杆46,两个第一导向杆46之间滑动式设有七个加重块45,两个第一导向杆46上均滑动式设有七个缓冲块47,缓冲块47有十四个,每两个加重块45之间都有两个缓冲块47,最下侧的两个缓冲块47位于底架1和最下侧的加重块45之间,支架2内上部前后两侧均转动式设有第一转轴48,两个第一转轴48下侧均设有第一导向轮49,两个转盘3左侧均设有第一连接块410,两个第一连接块410上均设有第一拉绳411,支架2内上部前后两侧均焊接有支撑块412,两个支撑块412之间转动式设有第二转轴416,第二转轴416上前后两侧均设有第二导向轮413,支架2内上侧设有导向架414,七个加重块45之间滑动式设有拉块415,两个第一拉绳411均绕过同侧的第一导向轮49和同侧的第二导向轮413并穿过导向架414与拉块415连接。
33.现参考图5-8,卡位机构5包括有固定块51、第一滑杆52、第一移动架53、拉环54、第二连接块55、卡块56、手推块57、第二导向杆58、第一伸缩杆59、第一弹簧510和限位块511,支架2上侧均匀设有四个固定块51,固定块51与底架1之间连接有第一滑杆52,第一滑杆52有四个,四个第一滑杆52之间滑动式设有第一移动架53,第一移动架53上滑动式设有拉环54,拉环54右部均匀设有三个第二连接块55,第二连接块55与第一移动架53滑动式连接,三个第二连接块55之间焊接有卡块56,拉块415左侧均匀开设有与卡块56配合的卡口,卡口与缓冲块47相对,卡块56与拉块415上的卡口配合,第一移动架53左右两侧均设有第二导向杆58,两个第二导向杆58之间滑动式设有手推块57,第一移动架53内左侧均匀设有三组第一伸缩杆59,每两个第一伸缩杆59为一组,第一伸缩杆59有六个,每两个第一伸缩杆59之间连接有限位块511,限位块511有三个,三个限位块511均与手推块57连接,第二连接块55上均开设有与限位块511配合的卡槽,限位块511与相邻第二连接块55的卡槽配合,限位块511后部上下两侧与第一移动架53之间均连接有第一弹簧510,第一弹簧510有六个,第一弹簧510绕在第一伸缩杆59上。
34.现参考图9-14,稳定机构6包括有安装架61、第二滑杆62、第三连接块63、盛重板64、支撑板65、下压板66、吸盘67、第二弹簧68、第二伸缩杆69、移动板610、第三滑杆611、第三弹簧612、第三伸缩杆613、下移板块614、限位杆615和第四弹簧616,底架1内底部中间设有安装架61,安装架61上部左侧滑动式设有第三连接块63,安装架61上部右侧滑动式设有第二滑杆62,第二滑杆62和第三连接块63上部之间连接有盛重板64,盛重板64下部右侧与安装架61之间连接有第二弹簧68,第二弹簧68绕在第二滑杆62上,底架1内底部前后两侧均焊接有支撑板65,第三连接块63下部设有移动板610,移动板610与安装架61滑动式连接,底架1内底部中间设有第三伸缩杆613,第三伸缩杆613上部设有下移板块614,下移板块614与安装架61滑动式连接,下移板块614与第三伸缩杆613之间连接有第四弹簧616,第四弹簧616绕在第三伸缩杆613上,下移板块614上部均匀设有八个第三滑杆611,移动板610与第三滑杆611滑动式连接,移动板610与下移板块614之间连接有八个第三弹簧612,第三弹簧612绕在第三滑杆611上,下移板块614前后两侧均设有限位杆615,两个限位杆615下侧均焊接有下压板66,下压板66与安装架61滑动式连接,两个下压板66外侧均均匀设有三个吸盘67,吸盘67用于吸附地面,吸盘67有六个,吸盘67与同侧的支撑板65滑动式连接,底架1内上部前后两侧均设有两个第二伸缩杆69,第二伸缩杆69与同侧的下压板66连接。
35.当人们需要锻炼辅助骨骼恢复时,人们可以使用这种医疗用肢体骨骼辅助恢复设备,首先人们向后移动手推块57,从而使得限位块511向后移动,使得第一伸缩杆59和第一弹簧510被压缩,然后人们向左移动拉环54,进而第二连接块55向左移动,使得卡块56向左移动,当卡块56移动至加重块45左侧时,人们根据需要向下移动第一移动架53,当第一移动架53移动至合适位置时,人们向右移动拉环54,从而使得第二连接块55向右移动,使得卡块56向右移动,当卡块56将拉块415卡住时,人们松开手推块57,从而使得第一弹簧510复位带动限位块511向前移动,使得第一伸缩杆59被拉伸,此时限位块511将第二连接块55卡住,此时卡块56上侧的加重块45总重量是人们需要锻炼的重量,随后人们坐在盛重板64上,将背靠在支架2上,从而使得盛重板64向下移动,使得第二滑杆62和第三连接块63向下移动,第二弹簧68被压缩,进而移动板610向下移动,在第三弹簧612弹力的作用下,下移板块614和第三滑杆611向下移动,从而使得第三伸缩杆613和第四弹簧616被压缩,使得限位杆615向
下移动,进而下压板66向下移动,使得吸盘67向下移动吸在地面上,在第四弹簧616不能再继续压缩时,第三连接块63和移动板610向下移动使得第三弹簧612被压缩,在第三弹簧612不能再继续压缩时,第三连接块63和移动板610停止向下移动,随后人们两手握住握块44并向内侧摆动,从而使得扶杆43和第一转杆42转动,使得转盘3和第一连接块410转动,从而使得第一拉绳411拉动拉块415向上移动,使得第一转轴48和第一导向轮49转动,进而第二导向轮413和第二转轴416转动,进而第一移动架53和卡块56向上移动,使得卡块56上侧的加重块45和缓冲块47向上移动,随后人们向外侧摆动握块44,从而使得转盘3和第一连接块410反向转动,使得在加重块45和缓冲块47重力的作用下,加重块45和缓冲块47沿着第一导向杆46向下移动,进而第一拉绳411带动第一转轴48和第一导向轮49反向转动,第二转轴416和第二导向轮413反向转动,以此实现了摆动手臂的效果,随后人们从盛重板64上起来,从而使得第二弹簧68复位带动盛重板64向上移动复位,使得第二滑杆62和第三连接块63向上移动,第三弹簧612复位带动移动板610向上移动,进而第四弹簧616复位带动下移板块614和限位杆615向上移动,使得第三滑杆611向上移动,第三伸缩杆613被拉伸,继而下压板66和吸盘67向上移动。
36.实施例2在实施例1的基础之上,现参考图12-13,还包括有吸附增强机构7,吸附增强机构7包括有压块71、第四伸缩杆72、连接架73、固定架74、气筒75、第四滑杆77、第五弹簧76、推动架78、连接板79、挤块710、第二连接柱711和导气管712,移动板610左侧设有压块71,压块71与安装架61滑动式连接,安装架61下侧滑动式设有连接架73,底架1内上部左侧通过螺栓固接有固定架74,固定架74与底架1之间连接有气筒75,气筒75上部左侧设有通气管,固定架74右部前后两侧均设有第四滑杆77,两个第四滑杆77之间滑动式设有推动架78,推动架78左部前后两侧与固定架74之间均连接有第五弹簧76,第五弹簧76绕在第四滑杆77上,底架1上部前后两侧均设有第四伸缩杆72,两个第四伸缩杆72均与连接架73连接,连接架73上转动式设有连接板79,连接板79与推动架78转动式连接,推动架78左部中间设有第二连接柱711,第二连接柱711与气筒75滑动式连接,第二连接柱711左部设有挤块710,挤块710与气筒75滑动式连接,气筒75与六个吸盘67之间连接有导气管712。
37.现参考图14,还包括有下肢恢复机构8,下肢恢复机构8包括有丝杆81、手柄82、第二移动架83、第五滑杆84、第六弹簧85、滑动架86和限制杆87,底架1右侧与安装架61之间转动式设有丝杆81,丝杆81右侧焊接有手柄82,丝杆81上螺纹式设有第二移动架83,第二移动架83与底架1滑动连接,第二移动架83内设有第五滑杆84,第五滑杆84与第二移动架83之间滑动式设有滑动架86,滑动架86与第二移动架83之间连接有第六弹簧85,第六弹簧85绕在第五滑杆84上,滑动架86前后两侧均设有两个限制杆87。
38.现参考图15,还包括有上肢移动机构9,上肢移动机构9包括有第二转杆91、第七弹簧92、摆杆93和第二拉绳94,支架2上侧转动式设有第二转杆91,第二转杆91上焊接有摆杆93,摆杆93左右两侧与支架2之间均连接有第七弹簧92,第七弹簧92绕在第二转杆91上,摆杆93前后两侧均设有第二拉绳94。
39.移动板610向下移动带动压块71向下移动,当压块71向下移动接触到连接架73时,压块71带动连接架73向下移动,第四伸缩杆72缩短,从而使得连接板79转动带动推动架78向左移动,使得第五弹簧76被压缩,第二连接柱711和挤块710向左移动,进而使得气筒75内
右部的气压减小,从而将吸盘67内的空气经导气管712吸至气筒75内,继而吸盘67更加紧的吸在地面上,以此实现了稳定的效果,避免了人们在锻炼的过程中底架1晃动,移动板610向上移动带动压块71向上移动,当压块71向上移动远离连接架73时,第五弹簧76复位带动推动架78向右移动复位,从而使得连接板79反向转动带动连接架73向上移动,第四伸缩杆72伸长,使得第二连接柱711和挤块710向右移动,此时气流在气压的作用下,使得空气从通气管流动至气筒75内左部,且气筒75内右部的空气经导气管712流至吸盘67内,使得吸盘67与地面分离。
40.当人们需要锻炼脚部骨骼时,首先人们手动转动手柄82,从而使得丝杆81转动,使得第二移动架83向左移动,当第二移动架83移动至合适位置时,人们停止转动手柄82,当人们坐在盛重板64上后,人们将腿放在第二移动架83上,将双脚放在两侧的两个限制杆87之间,随后人们可向上移动脚,从而使得限制杆87和滑动架86向上移动,使得第六弹簧85被压缩,以此实现了锻炼脚部骨骼的效果,当人们锻炼完成时,人们将脚从两个限制杆87之间抽出,从而使得第六弹簧85复位带动限制杆87和滑动架86复位,随后人们将腿从第二移动架83上抬下。
41.人们坐在盛重板64上后,人们可双手分别握住两个第二拉绳94,当人们左手向下拉动后侧的第二拉绳94时,使得后侧的第二拉绳94向下移动,从而使得摆杆93转动,使得第七弹簧92扭转形变,进而前侧的第二拉绳94向上移动,使得人们的右手臂被提起,当人们右手向下拉动前侧的第二拉绳94时,使得前侧的第二拉绳94向下移动,从而使得摆杆93转动,使得第七弹簧92扭转形变,进而后侧的第二拉绳94向上移动,使得人们的左手臂被提起,以此实现了锻炼手臂骨骼的效果,当人们锻炼完成时,人们松开第二拉绳94,从而使得第七弹簧92复位带动摆杆93复位,使得第二拉绳94复位。
42.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1