一种带休息椅的步态康复训练仪的电机控制系统
1.本发明涉及电机控制技术领域,具体为一种带休息椅的步态康复训练仪的电机控制系统。
背景技术:
2.众多脑卒中、脑外伤、脊髓损伤的患者都存在行走慢、行走姿势异常和易摔跤的问题,严重影响其生活质量。针对这些患者,目前康复临床比较通用的步态康复训练仪器,此外也有儿童脑瘫患者也会需要步态康复训练仪器。
3.公告号为cn212347558u的中国专利公开了一种步态康复训练仪,包括步态训练走动平面、安全保护装置、投影仪、电脑以及图像信息采集器,电脑包括主机和触摸显示屏,主机装有步态训练程序、数据计算模块和数据分析模块,触摸显示屏用于操作和显示该步态康复训练仪的训练内容,主机根据步态训练程序控制投影仪向步态训练走动平面投影出虚拟目标及虚拟场景,指引训练者按着该虚拟目标训练,图像信息采集器用于采集训练者在步态训练走动平面的运动参数及步行姿势数据并输送至主机。所述步态训练走动平面是跑步机形成的传送带平面,或行走地面,所述跑步机包括传送带、内框架、滚筒、支撑结构及行走电机,内框架的两端分别可转动地安装有滚筒,传送带绕设于两个滚筒上,行走电机用于驱动滚筒转动,还包括固定底座,跑步机安装于固定底座上,安全保护装置架设于固定底座的两侧。
4.但是训练者在传送带上面行走锻炼一段时间后,需要中间休息一下时,则需要解除安全保护装置对训练者的保护,然后让训练者走下传送带到旁边有座位的地方休息,再次使用时,需要重新绑定安全保护装置,因此本技术人认为现有的步态康复训练仪存在不能对训练者锻炼过程中需要休息时提供休息位置的缺陷。
技术实现要素:
5.针对上述存在的技术不足,本发明的目的是提供一种带休息椅的步态康复训练仪的电机控制系统,具有便于训练者在训练过程中能够坐下休息的优点。
6.为解决上述技术问题,本发明采用如下技术方案:
7.本发明提供一种带休息椅的步态康复训练仪的电机控制系统,包括内框架,所述内框架的两端分别可转动地安装有滚筒,两个所述滚筒之间缠绕有传送带,所述内框架上设有驱动其中一个滚筒转动的第一电机,所述内框架外设有固定底座,所述固定底座的一端设有安全支架,安全支架的顶部通过吊带连接有绑带套,所述内框架在传送带的两侧均设有支撑杆,两个所述支撑杆上端均设有水平的水平杆,所述安全支架包括设置在固定底座两侧的两个弧形板以及连接两个弧形板上端的连板,所述吊带设置在连板上,两个所述弧形板上端通过沿竖直方向伸缩的第一伸缩件连接有固定板,所述固定板上通过沿水平方向伸缩的第二伸缩件连接有水平的坐板,所述坐板上设有控制第二伸缩件伸缩长度的控制件。
8.通过采用上述技术方案,训练者通过绑带套捆绑于训练者的上身,第一电机控制传送带开始工作后,训练者在传送带上进行训练,当训练一段时间后,训练者需要休息时,第一电机停止工作,随后第一伸缩件将固定板向下移动至一定的高度,随后第二伸缩件驱动坐板向训练者方向移动,控制件控制第二伸缩件的伸缩长度,便于坐板自动移动到训练者需要站立的位置,此时训练者只需要向下坐下即可,此时无需解开绑带套,当需要继续训练时,训练者只需要站立,随后第二伸缩件和第一伸缩件将坐板移动至训练者的上方,此时第一电机驱动传送带继续工作,便于训练者继续训练,达到训练者在训练过程中能够坐下休息的目的。
9.优选地,所述第二伸缩件包括转动连接在固定板上的螺纹杆,所述螺纹杆由设置在固定板上的第二电机驱动,所述固定板竖直设置,所述坐板水平设置且与固定板垂直,所述坐板两端均设有穿入固定板两侧的导向杆,两个所述导向杆位于螺纹杆的两侧且与螺纹杆平行,所述坐板底部设有滑块,所述滑块与螺纹杆螺纹连接;
10.所述控制件包括设置在坐板朝向训练者一侧的第一距离感应器,所述第二电机上设有调节第二电机转速的调节模块,第一距离感应器采集坐板的一侧到训练者表面的距离为d,并将采集到的距离d传递到调节模块,所述调节模块用于根据距离d生成控制信号,所述第二电机用于根据控制信号输出相应的转速;
11.所述控制信号包括第一信号和第二信号,当所述距离d小于预设距离时,所述调节模块根据距离d生成第一信号,当所述距离d大于预设距离时,所述调节模块根据距离d生成第二信号;
12.所述第二电机响应第一信号输出的转速为0,所述第二电机响应第二信号输出的转速为v1。
13.优选地,所述第一伸缩件包括设置在两个弧形板之间的横板,所述横板朝向连板的一侧设有竖直的第一杆,所述第一杆背离横板的一侧沿竖直方向滑移连接有第二杆,所述第二杆背离第一杆的一侧沿竖直方向滑移连接有第三杆,所述第一杆和第二杆以及第三杆之间通过驱动件驱动。
14.优选地,所述驱动件包括设置在第二杆上端的第三电机,所述第二杆朝向第三杆的一侧开设有沿第二杆长度方向分布的滑槽,所述滑槽内转动连接有丝杆,所述第三杆上设有在滑槽内滑动且与丝杆螺纹连接的连接块,所述第二杆在设有第三电机的一端开设有放置槽,所述丝杆的一端延伸进入放置槽内,所述第三电机的转动轴延伸进入放置槽内,所述第三电机的转动轴上同轴固定连接有第一锥齿轮,所述丝杆延伸进入放置槽内的一端同轴固定设有与第一锥齿轮啮合的第二锥齿轮;
15.所述第三电机的转动轴穿出第二杆朝向第一杆的一侧且第一杆上开设有供转动轴进入的移动槽,所述移动槽沿第一杆的长度方向分布且所述移动槽的一侧槽壁上设有齿条,所述第三电机进入移动槽的一端同轴固定设有与齿条啮合的主动齿轮。
16.优选地,所述第一杆下端设有u形的导向板,所述第二杆的两侧分别与导向板的两侧滑移连接,所述导向板的开口朝向第三杆。
17.优选地,所述坐板的下端设有第二距离感应器,所述第三电机上设有调节第三电机转速的调节模块,第二距离感应器采集坐板的下端到传送带表面的距离为d,并将采集到的距离d传递到调节模块,所述调节模块用于根据距离d生成控制信号,所述第三电机用于
根据控制信号输出相应的转速;
18.所述控制信号包括第一信号和第二信号,当所述距离d小于预设距离时,所述调节模块根据距离d生成第一信号,当所述距离d大于预设距离时,所述调节模块根据距离d生成第二信号;
19.所述第三电机响应第一信号输出的转速为0,所述第三电机响应第二信号输出的转速为v2。
20.优选地,两个所述水平杆上均转动连接有限位杆,所述限位杆的一端均设有套在水平杆外壁的套筒,与有套筒相对的另一个水平杆上设有供限位杆另一端嵌入的嵌入槽,所述嵌入槽的数量设为若干且沿水平杆的长度方向分布,位于训练者前端的限位杆上端面设有长条形桌板。
21.优选地,所述横板上端转动连接有驱动轴,所述第一伸缩件与驱动轴通过动力件连接,当动力件工作时,所述第一伸缩件向靠近或者远离横板或者平行于横板的方向移动。
22.优选地,所述驱动轴竖直向上,且所述驱动轴外壁固定设有凸轮,所述横板上端面放置有方形框,所述凸轮在转动过程中始终有三点与方形框内壁抵触,所述方形框的一侧设有延伸出横板朝向连板一侧的滑动杆,所述第一杆的上端设置在滑动杆延伸出横板的一端,所述横板上设有将方形框限位在横板上移动的倒u形限位框,所述横板上在方形框的一侧设有两个相对的定位块,两个所述定位块之间穿设有垂直于滑动杆分布的定位杆,所述定位杆上开设有供滑动杆穿出的穿出孔。
23.优选地,所述方形框与滑动杆朝向横板的一侧嵌设有若干与横板上端面抵触的滚珠。
24.本发明的有益效果在于:训练者通过绑带套捆绑于训练者的上身,第一电机控制传送带开始工作后,训练者在传送带上进行训练,当训练一段时间后,训练者需要休息时,第一电机停止工作,随后第一伸缩件将固定板向下移动至一定的高度,随后第二伸缩件驱动坐板向训练者方向移动,控制件控制第二伸缩件的伸缩长度,便于坐板自动移动到训练者需要站立的位置,此时训练者只需要向下坐下即可,此时无需解开绑带套,当需要继续训练时,训练者只需要站立,随后第二伸缩件和第一伸缩件将坐板移动至训练者的上方,此时第一电机驱动传送带继续工作,便于训练者继续训练,达到训练者在训练过程中能够坐下休息的目的。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
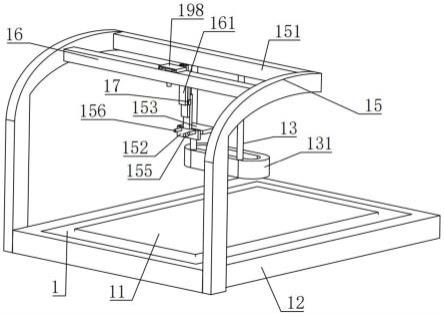
26.图1为本实施例的结构示意图;
27.图2为本实施例的用于体现螺纹杆的结构示意图;
28.图3为本实施例的用于体现第一距离感应器的结构示意图;
29.图4为本实施例的用于体现第一杆、第二杆和第三杆的结构示意图;
30.图5为本实施例的用于体现方形框的结构示意图;
31.图6为本实施例的用于体现水平杆的结构示意图。
32.附图标记说明:
33.图中:1、内框架;11、传送带;12、固定底座;13、吊带;131、绑带套;14、支撑杆;141、水平杆;15、弧形板;151、连板;152、固定板;153、坐板;154、螺纹杆;155、第二电机;156、导向杆;157、滑块;158、第一距离感应器;16、横板;161、第一杆;162、第二杆;163、第三杆;164、第三电机;165、滑槽;1651、丝杆;1652、连接块;166、放置槽;1661、第一锥齿轮;1662、第二锥齿轮;167、移动槽;168、齿条;169、主动齿轮;17、导向板;18、第二距离感应器;19、限位杆;191、套筒;192、嵌入槽;193、桌板;194、驱动轴;195、凸轮;196、方形框;197、滑动杆;198、限位框;2、定位块;21、定位杆。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.一种带休息椅的步态康复训练仪的电机控制系统,如图1和图6,包括内框架1,内框架1的两端分别可转动地安装有滚筒,两个滚筒之间缠绕有传送带11,内框架1上设有驱动其中一个滚筒转动的第一电机,内框架1外设有固定底座12,固定底座12的一端设有安全支架,安全支架的顶部通过吊带13连接有绑带套131,内框架1在传送带11的两侧均设有支撑杆14,两个支撑杆14上端均设有水平的水平杆141,水平杆141供训练者在传送带11上行走时,手部可以握住水平杆141,给训练者提供辅助支撑力,安全支架包括设置在固定底座12两侧的两个弧形板15以及连接两个弧形板15上端的连板151,弧形板15是从固定底座12开始向上弯曲延伸并使得弧形板15的另一端位于传送带11上方,吊带13设置在连板151上,两个弧形板15上端通过沿竖直方向伸缩的第一伸缩件连接有固定板152,固定板152上通过沿水平方向伸缩的第二伸缩件连接有水平的坐板153,坐板153上设有控制第二伸缩件伸缩长度的控制件。
36.如图1和图6,训练者通过两个弧形板15之间进入传送带11,将绑带套131捆绑于训练者的上身,第一电机控制传送带11开始工作后,训练者在传送带11上进行训练,当训练一段时间后,训练者需要休息时,注意此时的休息是短时间的休息,比如休息5分钟-10分钟左右,如果需要休息很长时间,如1小时以上的,可以直接选择不使用步态康复训练仪,即训练者走下传送带11;当训练者休息时间短时,第一电机停止工作,随后第一伸缩件将固定板152向下移动至一定的高度,随后第二伸缩件驱动坐板153向训练者方向移动,控制件控制第二伸缩件的伸缩长度,便于坐板153自动移动到训练者需要站立的位置,此时训练者只需要向下坐下即可,此时无需解开绑带套131,当需要继续训练时,训练者只需要站立,随后第二伸缩件和第一伸缩件将坐板153移动至训练者的上方,此时第一电机驱动传送带11继续工作,便于训练者继续训练,达到训练者在训练过程中能够坐下休息的目的。
37.如图1和图2,第一伸缩件包括设置在两个弧形板15之间的横板16,横板16朝向连板151的一侧设有竖直的第一杆161,第一杆161背离横板16的一侧沿竖直方向滑移连接有第二杆162,第二杆162背离第一杆161的一侧沿竖直方向滑移连接有第三杆163,第一杆161
和第二杆162以及第三杆163之间通过驱动件驱动,固定板152设置在第三杆163的下端。此时驱动件驱动第二杆162在第一杆161上下滑动,第三杆163在第二杆162上下滑动,进而使得第三杆163的下端逐渐上升或者下降,当第三杆163逐渐下降到一定高度后,第二伸缩件再开始工作,或者可以同时工作,此时第三杆163便于将第二伸缩件上的坐板153下降到训练者所需座的高度,当不需要使用坐板153时,第一伸缩件将坐板153升高至训练者头部以上空间即可,不会影响训练者锻炼。
38.如图2和图3,第二伸缩件包括转动连接在固定板152上的螺纹杆154,螺纹杆154由设置在固定板152上的第二电机155驱动,固定板152竖直设置,坐板153水平设置且与固定板152垂直,坐板153两端均设有穿入固定板152两侧的导向杆156,两个导向杆156位于螺纹杆154的两侧且与螺纹杆154平行,坐板153底部设有滑块157,滑块157与螺纹杆154螺纹连接;此时第二电机155开始正反转时,带动螺纹杆154转动,螺纹杆154带动滑块157在螺纹杆154上往返移动,此时带动坐板153在水平方向上移动,导向杆156的作用便于坐板153与固定板152产生滑移连接,且便于坐板153在水平方向上的移动。
39.如图2和图3,控制件包括设置在坐板153朝向训练者一侧的第一距离感应器158,第二电机155上设有调节第二电机155转速的调节模块,第一距离感应器158采集坐板153的一侧到训练者表面的距离为d,并将采集到的距离d传递到调节模块,调节模块用于根据距离d生成控制信号,第二电机155用于根据控制信号输出相应的转速;
40.控制信号包括第一信号和第二信号,当距离d小于预设距离时,调节模块根据距离d生成第一信号,当距离d大于预设距离时,调节模块根据距离d生成第二信号;
41.第二电机155响应第一信号输出的转速为0,第二电机155响应第二信号输出的转速为v1。
42.此时第二电机155驱动螺纹杆154转动,使得坐板153逐渐靠近训练者时,第一距离感应器158采集坐板153的一侧到训练者表面的距离,此时坐板153位于训练者的后面,预设距离比如是10cm时,当第一距离感应器158采集到的距离d小于10cm,则调节模块根据距离d生成第一信号,此时第二电机155响应第一信号输出转速为0,即第二电机155停止转动,即使得坐板153的位置不动,便于训练者坐到坐板153上,此时训练者的脚可以放置在传送带11上或者与传送带11之间存在间隙。
43.如图1和图4,驱动件包括设置在第二杆162上端的第三电机164,第二杆162朝向第三杆163的一侧开设有沿第二杆162长度方向分布的滑槽165,滑槽165内转动连接有丝杆1651,此时丝杆1651也沿竖直方向分布,第三杆163上设有在滑槽165内滑动且与丝杆1651螺纹连接的连接块1652,第二杆162在设有第三电机164的一端开设有放置槽166,丝杆1651的一端延伸进入放置槽166内,第三电机164的转动轴延伸进入放置槽166内,第三电机164的转动轴上同轴固定连接有第一锥齿轮1661,丝杆1651延伸进入放置槽166内的一端同轴固定设有与第一锥齿轮1661啮合的第二锥齿轮1662;此时第三电机164固定在第二杆162的上端外壁,第三电机164的转动轴转动进入放置槽166内,便于带动丝杆1651上的第二锥齿轮1662转动。
44.如图1和图4,第三电机164的转动轴穿出第二杆162朝向第一杆161的一侧且第一杆161上开设有供转动轴进入的移动槽167,移动槽167沿第一杆161的长度方向分布且移动槽167的一侧槽壁上设有齿条168,第三电机164进入移动槽167的一端同轴固定设有与齿条
168啮合的主动齿轮169。
45.如图1和图4,当需要将第二杆162和第三杆163向下滑动时,第三电机164开始工作,使得第三电机164通过第一锥齿轮1661和第二锥齿轮1662的啮合,带动丝杆1651转动,进而带动连接块1652在滑槽165内向下滑动,此时第三杆163沿着第二杆162向下移动,同时第三电机164上的主动齿轮169与齿条168啮合,使得第二杆162沿着齿条168向下移动,进而加快了第三杆163的下降速度以及下降高度,便于将坐板153下降到所需位置,当坐板153下降的高度位置固定时,比如坐板153距离传送带11为50cm,此时第二杆162外壁上设有一端延伸至第一杆161外壁的l形卡杆,第一杆161外壁设有卡块,当坐板153下降至距离传送带11为50cm时,第三电机164停止转动,卡杆收到卡块的支撑,限制了第二杆162在第一杆161上的位置。
46.如图1和图4,第一杆161下端设有u形的导向板17,第二杆162的两侧分别与导向板17的两侧滑移连接,导向板17的开口朝向第三杆163。此时导向板17的作用便于第二杆162在第一杆161上滑移。
47.如图3,坐板153的下端设有第二距离感应器18,第三电机164上设有调节第三电机164转速的调节模块,第二距离感应器18采集坐板153的下端到传送带11表面的距离为d,并将采集到的距离d传递到调节模块,调节模块用于根据距离d生成控制信号,第三电机164用于根据控制信号输出相应的转速;
48.控制信号包括第一信号和第二信号,当距离d小于预设距离时,调节模块根据距离d生成第一信号,当距离d大于预设距离时,调节模块根据距离d生成第二信号;
49.第三电机164响应第一信号输出的转速为0,第三电机164响应第二信号输出的转速为v2。
50.即当坐板153下降到所需高度时,第二距离感应器18采集坐板153的下端到传送带11表面的距离d,当预设距离为50cm时,当距离d小于预设距离时,调节模块根据距离d生成第一信号,第三电机164响应第一信号输出的转速为0,即第三电机164停止工作,当距离d大于预设距离时,表明坐板153未下降至所需高度,第三电机164响应第二信号输出的转速为v2,即坐板153以一定的速度下降。
51.如图6,当训练者坐在坐板153上后,两个水平杆141上均转动连接有限位杆19,限位杆19的一端均设有套在水平杆141外壁的套筒191,与有套筒191相对的另一个水平杆141上设有供限位杆19另一端嵌入的嵌入槽192,嵌入槽192的数量设为若干且沿水平杆141的长度方向分布,位于训练者前端的限位杆19上端面设有长条形桌板193。此时移动限位杆19,使得两个限位杆19分别位于训练者的前后两侧,此时将限位杆19远离套筒191的另一端嵌入嵌入槽192内,进而实现限位杆19的固定,此时前后两个限位杆19实现对训练者的保护,且便于训练者手握限位杆19站起来,桌板193的设计便于训练者手部放置,达到便于训练者休息的目的。
52.如图1和图5,当训练者站立位置不在坐板153正对位置时,需要调节坐板153的位置,因此横板16上端转动连接有驱动轴194,第一伸缩件与驱动轴194通过动力件连接,当动力件工作时,第一伸缩件向靠近或者远离横板16或者平行于横板16的方向移动。此时调节了坐板153的位置,增大使用范围。
53.如图1和图5,驱动轴194竖直向上,且驱动轴194外壁固定设有凸轮195,凸轮195由
三条弧形边圆弧过渡连接形成,凸轮195的中心与驱动轴194的轴线偏心连接,横板16上端面放置有方形框196,凸轮195在转动过程中始终有三点与方形框196内壁抵触,方形框196的一侧设有延伸出横板16朝向连板151一侧的滑动杆197,第一杆161的上端设置在滑动杆197延伸出横板16的一端,所述横板16上设有将方形框196限位在横板16上移动的倒u形限位框198,使得方形框196始终在横板16上移动,横板16上在方形框196的一侧设有两个相对的定位块2,两个定位块2之间穿设有垂直于滑动杆197分布的定位杆21,定位杆21的两端均穿出两个定位块2相互背离的一侧,定位杆21上开设有供滑动杆197穿出的穿出孔,此时定位块2和定位杆21也位于限位框198内。驱动轴194由固定在横板16下端面的第四电机同轴驱动。
54.如图1和图5,当第四电机工作时,带动驱动轴194转动,此时驱动轴194带动凸轮195转动,使得凸轮195的边缘带动方形框196在横板16上移动,方形框196带动滑动杆197也在横板16上移动,此时滑动杆197带动定位杆21在两个定位块2之间往返移动,且滑动杆197远离方形框196一端的移动轨迹为矩形,便于滑动杆197带动第一杆161产生位移,便于第一杆161通过第二杆162和第三杆163带动坐板153,在空间内做向靠近或者远离横板16或者平行于横板16的方向移动,便于改变坐板153的位置,进而满足训练者使用要求。
55.如图1和图5,方形框196与滑动杆197朝向横板16的一侧嵌设有若干与横板16上端面抵触的滚珠(图中未画出),此时滚柱的设置便于方形框196和滑动杆197在横板16上端面滑移,且滑动杆197延伸出横板16的一端是不设置滚珠的。
56.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1