虚拟场景中的寻路方法、装置、计算机设备及存储介质与流程
本发明涉及路径构建领域,尤其涉及一种虚拟场景中的寻路方法、装5置、计算机设备及存储介质。
背景技术:
1、在三维游戏空间下,空中寻路因需同时考虑地形高度、空中障碍等等之类的数据,故空中寻路需基于较多的寻路参考数据来进行。而在寻路参0考数据较多的情况下,盲目地利用各类寻路算法来完成路径构建存在效率过低且代价巨大的情况,难以满足现阶段游戏设置需求。
技术实现思路
1、有鉴于此,本发明提供一种虚拟场景中的寻路方法、装置、计算机设5备及存储介质,用于改善空中寻路存在效率过低且代价巨大的现状。
2、第一方面,本发明实施例提供一种虚拟场景中的寻路方法,包括:
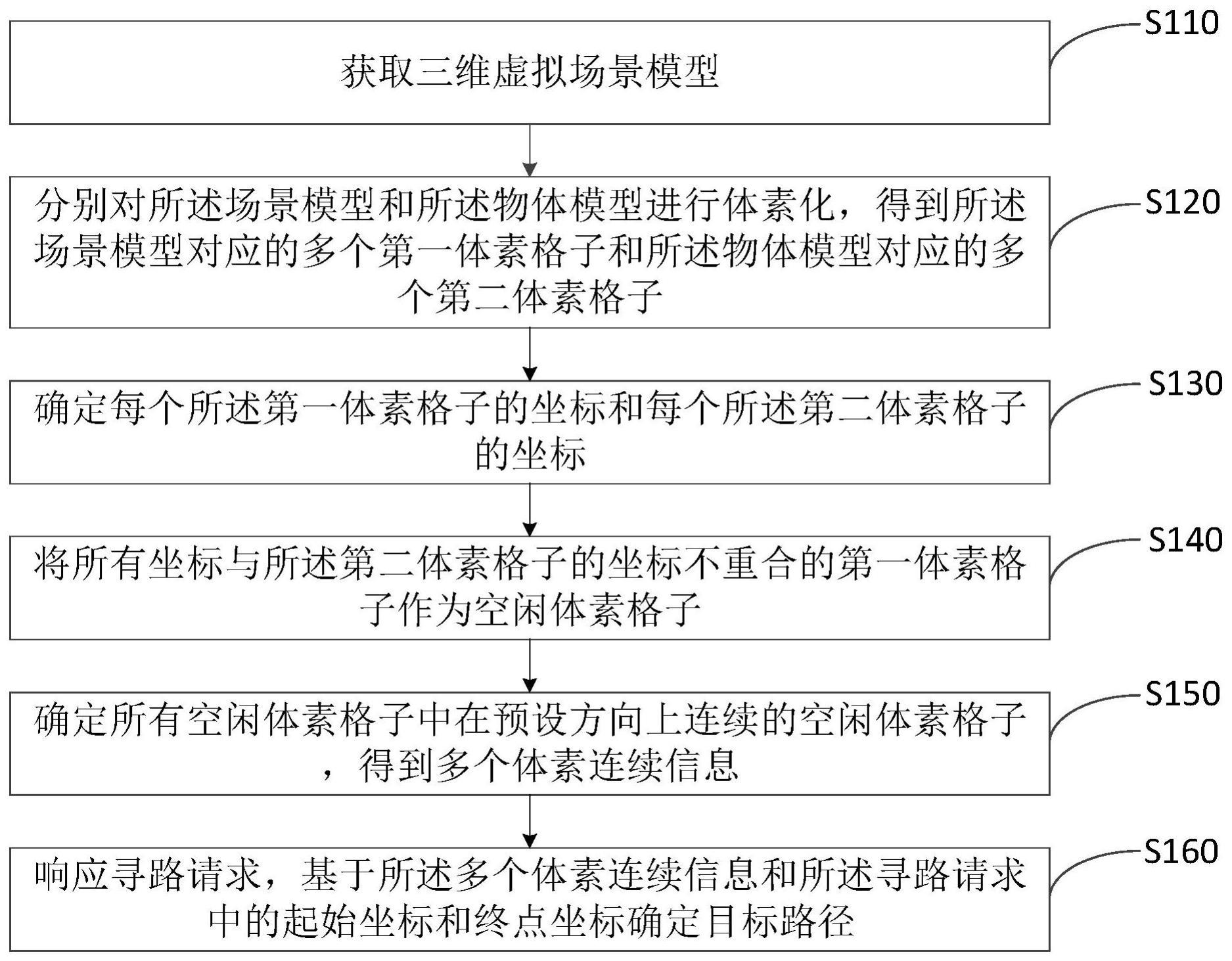
3、获取三维虚拟场景模型,其中,所述三维虚拟场景模型包括场景模型和物体模型;
4、分别对所述场景模型和所述物体模型进行体素化,得到所述场景模型0对应的多个第一体素格子和所述物体模型对应的多个第二体素格子;
5、确定每个所述第一体素格子的坐标和每个所述第二体素格子的坐标;
6、将所有坐标与所述第二体素格子的坐标不重合的第一体素格子作为空闲体素格子;
7、确定所有空闲体素格子中在预设方向上连续的空闲体素格子,得到多5个体素连续信息,其中,所述预设方向为表示三维空间的三维方向中的其中一种,所述体素连续信息包括连续的空闲体素格子的坐标;
8、响应寻路请求,基于所述多个体素连续信息和所述寻路请求中的起始坐标和终点坐标确定目标路径。
9、可选的,在本发明实施例提供的一种可行方式中,所述响应寻路请求,基于所述多个体素连续信息和所述寻路请求中的起始坐标和终点坐标确定目标路径,包括:
10、响应寻路请求,基于a星算法、所述多个体素连续信息及所述寻路请求中的起始坐标和终点坐标确定目标路径。
11、可选的,在本发明实施例提供的一种可行方式中,所述三维虚拟场景模型位于预设空间中,所述预设空间包括多个相同空间大小的子空间区域,所述体素连续信息还包括连续的空闲体素格子对应的长度;
12、所述确定所有空闲体素格子中在预设方向上连续的空闲体素格子,得到多个体素连续信息,包括:
13、基于所述空闲体素格子的坐标,确定每个所述子空间区域中在预设方向上连续的空闲体素格子的数量及所述连续的空闲体素格子的起始空闲体素格子的坐标;
14、基于每个所述子空间区域中的所述起始空闲体素格子的坐标和包含所述起始空闲体素格子的连续的空闲体素格子的数量,生成每个所述子空间区域的体素连续信息。
15、可选的,在本发明实施例提供的一种可行方式中,还包括:
16、将所述每个所述空间区域的体素连续信息写入至预设文件;
17、响应于所述三维虚拟场景模型对应的加载请求,加载所述预设文件。
18、可选的,在本发明实施例提供的一种可行方式中,每个所述子空间区域为由预设y轴长度与xy平面构成的空间。
19、第二方面,本发明实施例提供一种虚拟场景中的寻路装置,包括:
20、获取模块,用于获取三维虚拟场景模型,其中,所述三维虚拟场景模型包括场景模型和物体模型;
21、体素化模块,用于分别对所述场景模型和所述物体模型进行体素化,得到所述场景模型对应的多个第一体素格子和所述物体模型对应的多个第二体素格子;
22、坐标确定模块,用于确定每个所述第一体素格子的坐标和每个所述第二体素格子的坐标;
23、空闲确定模块,用于将所有坐标与所述第二体素格子的坐标不重合的第一体素格子作为空闲体素格子;
24、信息得到模块,用于确定所有空闲体素格子中在预设方向上连续的空闲体素格子,得到多个体素连续信息,其中,所述预设方向为表示三维空间的三维方向中的其中一种,所述体素连续信息包括连续的空闲体素格子的坐标;
25、寻路模块,用于响应寻路请求,基于所述多个体素连续信息和所述寻路请求中的起始坐标和终点坐标确定目标路径。
26、可选的,在本发明实施例提供的一种可行方式中,所述寻路模块还用于响应寻路请求,基于a星算法、所述多个体素连续信息及所述寻路请求中的起始坐标和终点坐标确定目标路径。
27、第三方面,本发明实施例提供一种计算机设备,包括存储器以及处理器,存储器存储有计算机程序,计算机程序在处理器上运行时执行如第一方面中任一种虚拟场景中的寻路方法。
28、第四方面,本发明实施例提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序在处理器上运行时执行如第一方面中任一种虚拟场景中的寻路方法。
29、本发明提供的虚拟场景中的寻路方法中,首先,获取三维虚拟场景模型;然后,分别对三维虚拟场景模型中的场景模型和物体模型进行体素化,得到场景模型对应的多个第一体素格子和物体模型对应的多个第二体素格子;随后,确定每个第一体素格子的坐标和每个第二体素格子的坐标;之后,将所有坐标与第二体素格子的坐标不重合的第一体素格子作为空闲体素格子,从而确定无障碍物的各个体素格子对应的空间;接着,确定所有空闲体素格子中在预设方向上连续的空闲体素格子,得到多个体素连续信息,即,确定无障碍物且连续可走的空间;最后,在接收到寻路请求时,基于多个体素连续信息和寻路请求中的起始坐标和终点坐标确定目标路径。基于此,本发明基于预先构建的体素连续信息,使得寻路时能基于虚拟空间中无障碍物且连续可行/可走的区域,完成起点到终点的路径构建,从而避免了常规空中寻路机制下将因障碍物信息较多,进而寻路效率低且代价较高的情况,提高了空中寻路效率。
技术特征:
1.一种虚拟场景中的寻路方法,其特征在于,包括:
2.根据权利要求1所述的虚拟场景中的寻路方法,其特征在于,所述响应寻路请求,基于所述多个体素连续信息和所述寻路请求中的起始坐标和终点坐标确定目标路径,包括:
3.根据权利要求1所述的虚拟场景中的寻路方法,其特征在于,所述三维虚拟场景模型位于预设空间中,所述预设空间包括多个相同空间大小的子空间区域,所述体素连续信息还包括连续的空闲体素格子对应的长度;
4.根据权利要求3所述的虚拟场景中的寻路方法,其特征在于,还包括:
5.根据权利要求3所述的虚拟场景中的寻路方法,其特征在于,每个所述子空间区域为由预设y轴长度与xy平面构成的空间。
6.一种虚拟场景中的寻路装置,其特征在于,包括:
7.根据权利要求6所述的虚拟场景中的寻路装置,其特征在于,所述寻路模块还用于响应寻路请求,基于a星算法、所述多个体素连续信息及所述寻路请求中的起始坐标和终点坐标确定目标路径。
8.根据权利要求6所述的虚拟场景中的寻路装置,其特征在于,所述三维虚拟场景模型位于预设空间中,所述预设空间包括多个相同空间大小的子空间区域,所述体素连续信息还包括连续的空闲体素格子对应的长度;
9.一种计算机设备,其特征在于,包括存储器以及处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器上运行时执行如权利要求1-5任一项所述的虚拟场景中的寻路方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序在处理器上运行时执行如权利要求1-5任一项所述的虚拟场景中的寻路方法。
技术总结
本发明公开了一种虚拟场景中的寻路方法、装置、计算机设备及存储介质,涉及路径构建领域,所述方法包括:获取三维虚拟场景模型;分别对场景模型和物体模型进行体素化,得到场景模型对应的第一体素格子和物体模型对应的第二体素格子;确定每个第一体素格子的坐标和每个第二体素格子的坐标;将与第二体素格子的坐标不重合的第一体素格子作为空闲体素格子;确定所有空闲体素格子中在预设方向上连续的空闲体素格子,得到体素连续信息;在接收到寻路请求时,基于体素连续信息和寻路请求中的起始坐标和终点坐标确定目标路径。由此,本发明基于体素连续信息,使得寻路时能基于虚拟空间中无障碍物且连续可走的区域完成路径构建。
技术研发人员:陈凌锋
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!