依靠腿行走的仿生螃蟹
1.本实用新型属于机器人技术领域,涉及一种仿生机器人,尤其涉及一种依靠腿行走的仿生螃蟹。
背景技术:
2.国内外仿蟹形机械的发展以各高校及科研机构为主,目前已取得丰富成果。国内的相关研究因为起步较晚,与国外研究相比系统性和基础性较弱。国外仿蟹形机械因发展较早,在此领域有深入的研究;仿蟹形机械除了可以模拟螃蟹的正常行走还可以实现搬运、避障、拾取、扫雷、环境监测和水下救援等功能。其中由韩国研制的蟹形机械有过实际救援的经历。韩国“岁月号”沉船事故发生后,由韩国海洋科技学院研发的蟹形机械参加了相关打捞工作,并取得一定成果。国内的哈尔滨工业大学在仿生蟹领域走在前列,在2005年已发出多篇相关领域的文章并进行了原型机的制作,原型机可以模拟螃蟹的水下爬行动作。最近关于仿生蟹的论文是由江苏科技大学在2020年发布的,其主要研究方向为关于仿生蟹水动力优化与推进特性等方面的问题。
3.国内市面上现有的蟹类产品,对其进行分析,得出如下结论:目前的仿生蟹产品能做到形状的完整模仿,但传动部分主要还是依靠轮子,腿仅为摆设,无法真实的做到螃蟹的运动,导致其无法实现科普的目的。市面上没有可以进行拼装的螃蟹产品,且现有的蟹型产品功能相对单一,无法满足市场的需要。仿生蟹类产品也开始进入儿童市场,但市场中的仿蟹型产品功能单一、可玩性差,无法激起儿童玩耍兴趣,更不能锻炼儿童的手脚协调和运动能力帮助儿童成长。
技术实现要素:
4.为了解决背景技术中的上述技术问题,本实用新型提供了一种可实现螃蟹真实的步态的依靠腿行走的仿生螃蟹。
5.为了实现上述目的,本实用新型采用如下技术方案:
6.一种依靠腿行走的仿生螃蟹,其特征在于:所述依靠腿行走的仿生螃蟹包括躯干、前步足、后步足、超声波传感器以及步态驱动装置;所述前步足以及后步足自前而后依次设置在躯干上;所述超声波传感器以及步态驱动装置分别置于躯干上;所述步态驱动装置分别带动前步足以及后步足横向运动。
7.作为优选,本发明所采用的躯干包括连接主板以及罩于连接主板外部的壳体;所述超声波传感器置于壳体上;所述步态驱动装置置于壳体内部并与连接主板相连;所述步态驱动装置包括第一mg996舵机、连杆以及异形推杆;所述第一mg996舵机设置在连接主板上;所述第一mg996舵机通过连杆以及异形推杆带动前步足运动。
8.作为优选,本发明所采用的前步足包括左一前步足、左二前步足、左三前步足、右一前步足、右二前步足以及右三前步足;所述左一前步足、左二前步足以及左三前步足自前而后依次设置在躯干的同一侧;所述右一前步足、右二前步足以及右三前步足自前而后依
次设置在躯干的同一侧;所述左一前步足与右一前步足相对设置;所述左二前步足与右二前步足相对设置;所述左三前步足与右三前步足相对设置;所述第一mg996舵机通过连杆以及异形推杆带动左一前步足、左二前步足、左三前步足、右一前步足、右二前步足以及右三前步足运动。
9.作为优选,本发明所采用的连杆包括第一连杆以及第二连杆;所述异形推杆包括第一异形推杆以及第二异形推杆;所述第一连杆与第一异形推杆相连;所述第二连杆与第二异形推杆相连;所述第一mg996舵机分别与第一连杆以及第二连杆相连;所述第一连杆和第二连杆的方向相反;所述第一异形推杆分别与左一前步足、右二前步足以及左三前步足相连;所述第二异形推杆分别与右一前步足、左二前步足以及右三前步足相连;所述第一mg996舵机通过第一连杆以及第一异形推杆带动左一前步足、右二前步足以及左三前步足运动;所述第一mg996 舵机通过第二连杆以及第二异形推杆带动右一前步足、左二前步足以及右三前步足运动。
10.作为优选,本发明所采用的第一异形推杆与第二异形推杆的结构完全相同,所述第一异形推杆整体呈梯形。
11.作为优选,本发明所采用的左一前步足、左二前步足、左三前步足、右一前步足、右二前步足以及右三前步足的结构完全相同;所述左一前步足包括前步足大腿、前步足小腿、连接座、第一推杆以及第二推杆;所述前步足大腿通过连接座设置在连接主板上;所述前步足大腿通过销轴与前步足小腿相连;所述第一推杆的一端与前步足小腿活动连接,另一端与异形推杆相连;所述第二推杆的一端通过销轴设置在连接座上,另一端与前步足大腿活动连接。
12.作为优选,本发明所采用的前步足大腿上设置有前节槽口;所述第二推杆的一端通过销轴设置在连接座上,另一端置于前步足大腿的前节槽口中并在前节槽口中自如滑动;所述前步足小腿上设置有指节槽口;所述第一推杆的一端与异形推杆相连,另一端置于前步足小腿的指节槽口中并在指节槽口中自如滑动。
13.作为优选,本发明所采用的前节槽口是整体呈瓦片式结构或是弧形槽;所述指节槽口是整体呈瓦片式结构或是弧形槽;所述第一推杆上设置有长节槽口,所述第二推杆的一端通过销轴设置在连接座上,另一端从第一推杆上的长节槽口穿过后置于前步足大腿的前节槽口中并在前节槽口中自如滑动;所述长节槽口整体呈矩形或腰型。
14.作为优选,本发明所采用的后步足包括后步足小腿以及后步足大腿;所述步态驱动装置还包括第二mg90舵机、舵机固定件以及第三mg996舵机;所述后步足大腿通过销轴设置在连接主板上;所述后步足大腿通过第二mg90舵机与后步足小腿相连;所述第三mg996舵机通过舵机固定件设置在后步足大腿上;所述第三mg996舵机带动后步足大腿上下举降;所述第二mg90 舵机带动后步足小腿左右摆动。
15.作为优选,本发明所采用的依靠腿行走的仿生螃蟹还包括螯足,所述螯足前步足以及后步足自前而后依次设置在躯干上;所述螯足包括第一螯足、第二螯足以及桁架;所述步态驱动装置还包括第二mg996舵机以及第一mg90舵机;所述桁架整体呈y型;所述桁架通过第二 mg996舵机设置在连接主板上;所述控制器通过第二mg996舵机带动桁架进行上下举降;所述第一螯足以及第二螯足分别设置在桁架的两个分支上;所述第一螯足与桁架之间以及第二螯足与桁架之间均设置有第一mg90舵机;所述控制器通过第一mg90舵机带动第
一螯足和/或第二螯足左右摆动;所述第一螯足以及第二螯足的结构完全相同;所述第一螯足包括支撑架、掌节以及指节;所述支撑架设置在桁架的分支上,所述支撑架与桁架之间设置有第一mg90舵机;所述掌节以及指节依次设置在支撑架上。
16.本实用新型的优点是:
17.本实用新型提供了一种依靠腿行走的仿生螃蟹,包括躯干、螯足、前步足、后步足以及控制器;螯足、前步足以及后步足自前而后依次设置在躯干上;控制器置于躯干上并通过躯干分别带动螯足、前步足以及后步足运动。本实用新型以圣诞岛红蟹为仿生对象研发一款具有行走、转弯、挥舞蟹钳和交互等功能的仿生螃蟹,该仿生蟹应用在早教领域,帮助开发儿童思维,训练儿童手脑协调和运动能力。同时,本实用新型通过研发槽形状和长度来控制腿部摆角,使仿生蟹在运动过程中实现螃蟹真实的步态;通过独立的动力源改变第四步足的运动状态,使第四组步足与前三组步足做差速运动实现转向。
附图说明
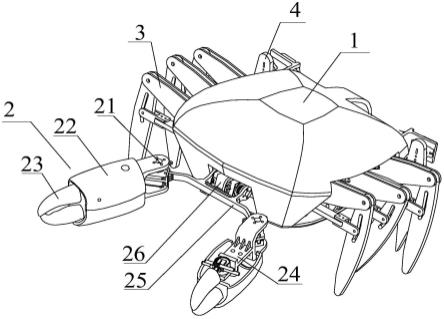
18.图1是本实用新型所提供的依靠腿行走的仿生螃蟹的结构示意图;
19.图2是本实用新型所采用的前步足的结构示意图;
20.图3是本实用新型所采用的后步足的结构示意图;
21.图4是本实用新型所采用的躯干的结构示意图;
22.其中:
23.1-躯干;11-第一连杆;12-连接主板;13-第一mg996舵机;14-第二连杆;15-第一异形推杆;16-第二异形推杆;2-螯足;21-第一mg90舵机;22-掌节;23-指节;24-支撑架;25-桁架;26-第二mg996舵机;3-前步足;31-前步足大腿;32-前步足小腿;33-第一推杆;34-第二推杆; 351-前节槽口;352-指节槽口;353-长节槽口;36-连接座;4-后步足;41-第二mg90舵机;42
‑ꢀ
后步足小腿;43-舵机固定件;44-第三mg996舵机;45-后步足大腿。
具体实施方式
24.本实用新型旨在研发一款以圣诞岛红蟹为仿生对象,五连杆作为腿部运动时的主要传动结构,以舵机为动力源实现行走、转弯、挥舞蟹钳和交互等功能的仿生蟹,尤其是依靠腿行走的仿生螃蟹。
25.对圣诞岛红蟹的外观进行观察,得出螃蟹主要由三大部分组成:螯足、步足、躯干。其中螯足和步足是螃蟹运动的核心。在整个研发过程中以螃蟹的结构研发为主,主要对步足和螯足进行分析研发。螃蟹的胸部两边有5对附肢,又叫胸足。其中,第一对特别强壮,有捕食、挖掘、防御功能,称为螯足;后四对称为步足,具有爬行功能,胸足由近体至末端分为底节、基节、座节、长节、腕节、掌节(前节)以及指节。螃蟹的胸足由指节、掌节、腕节、长节、坐节、基节、底节七部分构成。实际情况中基节和底节已逐渐退化与躯干连在一起,指节、掌节、腕节的相对转动很小,因此,在研发过程中将长节和坐节简化为大腿,基节和底节作为连接躯干和大腿的转动副,指节、掌节简化为小腿,腕节为大腿和小腿间的转动副。躯干连接处研发为单自由度的转动副。
26.螃蟹的运动方式是横向运动。螃蟹体内与肢节相连的骨眼(肌肉束通过的地方),对于每条肢节都有上下两个骨眼(即两束肌肉)与之相连。而且其肢节基部关节弯曲方向与
身体平行,所以当肌肉收缩时,便牵动肢沿平行与身体方向运动,故螃蟹便横向运动。其中的四对附属肢就是螃蟹的步足,螃蟹走路移动要依靠这四对步足,四对步足协调交替运动实现螃蟹的横向运动。在螃蟹运动时一侧步足弯曲,用指尖抓住地面,同时另一侧步足向外伸展,当指端够到远处地面时便开始收缩,而原先弯曲的一侧步足此时伸直,把身体推向相反的一侧,于是螃蟹向侧前方前进了一步,如此反复实现螃蟹正常行走。
27.螯足是蟹类捕食和自卫的重要部位,其运动副为关节处的转动副,经过分析螯足有两个转动副,长节与掌节处的转动副可以实现螯足的挥舞摆动;掌节与指节处的转动副实现螃蟹的正常夹取动作。
28.本实用新型以圣诞岛红蟹为原型,基于分析仿生对象和市面上现存问题为背景确定需解决的需求。根据需求确定主要功能。根据功能逐一确定并优化结构方案。对实物各个部位进行实际尺寸测量后建立各部位之间的比例的数学模型,在确定主要结构的尺寸之后,依据所建立的数学模型中各个部位的尺寸比例确定其他部位尺寸。在研发过程中将研发内容分为三大部分:躯干、步足、螯足。针对三个部分功能的不同分别研发出了相应的结构。其中,躯干作为载体连接各个部分,是整个仿生蟹的主要承重部分,在研发空间合理的同时保证其强度。步足是仿生蟹运动的核心,利用不同步足间的协调工作实现仿生蟹的基本运动轨迹和规定动作。螯足需要完成挥舞等动作,因此对灵活性要求较高,研发时选用舵机作为关节进行控制。
29.参见图1以及图2,一种依靠腿行走的仿生螃蟹,包括躯干1、前步足3、后步足4、超声波传感器以及步态驱动装置;前步足3以及后步足4自前而后依次设置在躯干1上;超声波传感器以及步态驱动装置分别置于躯干1上;步态驱动装置分别带动前步足3以及后步足4横向运动。本实用新型所提供的依靠腿行走的仿生螃蟹还包括设置在躯干1上的超声波传感器,使本实用新型具有避障的功能。超声波传感器是hc-sr04超声波测距模块,hc-sr04的一端发出超声波,接触到障碍物后反射,被另一个端口接收,通过检测超声波发射和接受的时间差,就可以根据声波传播的速率算出hc-sr04和障碍物之间的距离。hc-sr04超声波测距模块在有效探测范围内可自动标定,无需任何人工调整就可以获得障碍物的准确位置。该传感器具有测量精度高、抗环境干扰能力强的特点。
30.摇杆滑块机构作为输出动力结构。动力输出稳定,面接触低副,压强小,便于润滑,磨损轻,寿命长;传递动力大易于加工,可获得较高精度,成本低;杆可较长,可用作实现远距离的操纵控制。在连杆机构中,当原动件的运动规律不变可用改变各构件的相对长度来使从动件得到不同的运动规律。同时可以方便地用来达到增力、扩大行程和实现远距离传动等目的。本实用新型分析了摇杆滑块机构以及连杆机构的差异,选取摇杆滑块作为动力传输结构。本实用新型所采用的躯干1包括连接主板12以及罩于连接主板12外部的壳体;超声波传感器置于壳体上;步态驱动装置置于壳体内部并与连接主板12相连;步态驱动装置包括第一 mg996舵机13、连杆以及异形推杆;第一mg996舵机13设置在连接主板12上;第一mg996舵机13 通过连杆以及异形推杆带动前步足3运动。躯干1由两块板件分割为上下两个空间,两板间由螺柱进行连接并作为板间的主要支撑。下部空间主要放置传动零件和相关动力源,上层空间放置控制板和电源,上下两层的研发提高了螃蟹内部的空间使用效率,同时分散受力,减小机器内部的应力集中,减小单个板件的压力。
31.前步足3包括左一前步足、左二前步足、左三前步足、右一前步足、右二前步足以及
右三前步足;左一前步足、左二前步足以及左三前步足自前而后依次设置在躯干1的同一侧;右一前步足、右二前步足以及右三前步足自前而后依次设置在躯干1的同一侧;左一前步足与右一前步足相对设置;左二前步足与右二前步足相对设置;左三前步足与右三前步足相对设置;第一mg996舵机13通过连杆以及异形推杆带动左一前步足、左二前步足、左三前步足、右一前步足、右二前步足以及右三前步足运动。
32.连杆包括第一连杆11以及第二连杆14;异形推杆包括第一异形推杆15以及第二异形推杆 16;第一连杆11与第一异形推杆15相连;第二连杆14与第二异形推杆16相连;第一mg996舵机 13分别与第一连杆11以及第二连杆14相连;第一连杆11和第二连杆14的方向相反;第一异形推杆15分别与左一前步足、右二前步足以及左三前步足相连;第二异形推杆16分别与右一前步足、左二前步足以及右三前步足相连;第一mg996舵机13通过第一连杆11以及第一异形推杆 15带动左一前步足、右二前步足以及左三前步足运动;第一mg996舵机13通过第二连杆14以及第二异形推杆16带动右一前步足、左二前步足以及右三前步足运动。将前步足分为两组,通过异形推杆为动力的输出结构,交替向前实现连续运动。第一异形推杆15与第二异形推杆16 的结构完全相同,第一异形推杆15整体呈梯形。
33.参见图3,本实用新型所采用的左一前步足、左二前步足、左三前步足、右一前步足、右二前步足以及右三前步足的结构完全相同;左一前步足包括前步足大腿31、前步足小腿32、连接座36、第一推杆33以及第二推杆34;前步足大腿31通过连接座36设置在连接主板12上;前步足大腿31通过销轴与前步足小腿32相连;第一推杆33的一端与前步足小腿32活动连接,另一端与异形推杆相连;第二推杆34的一端通过销轴设置在连接座36上,另一端与前步足大腿31活动连接。
34.为控制更好模拟螃蟹前进时抬腿迈步,收腿后蹬的动作,前步足大腿31上设置有前节槽口351;第二推杆34的一端通过销轴设置在连接座36上,另一端置于前步足大腿31的前节槽口 351中并在前节槽口351中自如滑动;前步足小腿32上设置有指节槽口352;第一推杆33的一端与异形推杆相连,另一端置于前步足小腿32的指节槽口352中并在指节槽口352中自如滑动。前节槽口351是整体呈瓦片式结构或是弧形槽;指节槽口352是整体呈瓦片式结构或是弧形槽;第一推杆33上设置有长节槽口353,第二推杆34的一端通过销轴设置在连接座36上,另一端从第一推杆33上的长节槽口353穿过后置于前步足大腿31的前节槽口351中并在前节槽口351中自如滑动;长节槽口353整体呈矩形或腰型。本实用新型通过在腿部零件上添加槽口控制运动过程中的步距和轨迹。优势是减少结构,减轻研发的重量,充分利用每个零件的各部分空间实现研发目的。腿部结构为更好的实现对螃蟹步态的模拟,导向结构的研发为腿部研发的主要类容。通过筛选决定在凸轮和导向槽两种不同的导向结构中选取一种进行导向。两种结构在研发制作方面都比较合适。但在装配时,相较于导向槽凸轮安装复杂,且对精度要求高。导向槽在导向的同时可以减轻作品的整体重量,减小舵机的负担。槽口的开设方式是:在已知腿部个部分尺寸以及摆角情况下,通过将迈腿达到最远点,收腿达到最近点时的各腿部杆件位置。此时连接点在杆件上留下的运动轨迹即为槽的中心线。通过量取不同状态下同一连接点在同一杆件的不同位置距离确定槽口在杆件上的相对位置。
35.此外,在槽口处还可以设置滚动轴承和止推轴承,用于减小摩擦,但不利于仿生蟹转弯翻身动作的实现。将第四对步足(后步足4)研发为关节以舵机为主的结构,通过舵机控
制最后一对足运动状态影响整体的运动状态,实现螃蟹的转弯。后步足4包括后步足小腿42以及后步足大腿45;步态驱动装置还包括第二mg90舵机41、舵机固定件43以及第三mg996舵机44;后步足大腿45通过销轴设置在连接主板12上;后步足大腿45通过第二mg90舵机41与后步足小腿 42相连;第三mg996舵机44通过舵机固定件43设置在后步足大腿45上;第三mg996舵机44带动后步足大腿45上下举降;第二mg90舵机41带动后步足小腿42左右摆动。
36.为了更好地提高螯足的灵活性,螯足的各关节由舵机构成,通过控制舵机角度达到控制蟹钳部分的运动路径,完成不同的动作。参见图1,本实用新型所提供的依靠腿行走的仿生螃蟹还包括螯足2,螯足2前步足3以及后步足4自前而后依次设置在躯干1上;螯足2包括第一螯足、第二螯足以及桁架25;步态驱动装置还包括第二mg996舵机26以及第一mg90舵机21;桁架 25整体呈y型;桁架25通过第二mg996舵机26设置在连接主板12上;第二mg996舵机26带动桁架 25进行上下举降;第一螯足以及第二螯足分别设置在桁架25的两个分支上;第一螯足与桁架 25之间以及第二螯足与桁架25之间均设置有第一mg90舵机21;第一mg90舵机21带动第一螯足和/或第二螯足左右摆动;第一螯足以及第二螯足的结构完全相同;第一螯足包括支撑架24、掌节22以及指节23;支撑架24设置在桁架25的分支上,支撑架24与桁架25之间设置有第一mg90 舵机21;掌节22以及指节23依次设置在支撑架24上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1