一种单驾驶位仿真动物骑行装置的制作方法
本技术涉及乘坐装置,尤其涉及骑行装置。
背景技术:
1、随着城市的发展,城市周边修建的生活广场、卖场、景区和野外主题公园是越来越多,其规模面积是越来越大,游客逛完往往需要很长的时间;因此现在很多景区里面有驾驶及乘坐的车辆,这些车辆,大多采用小火车、摩托车、观光火车等。这种车辆行驶质感单一,无法吸引乘客特别是儿童乘客重复乘坐,仅具简单的乘坐功能,不具有健身功能。
2、此外,这些行驶在景区里的车由于景区里游人众多,所以容易发生撞车事故,现有的骑行装置大多是采用驾驶者操作和刹车,一旦驾驶者反应不及时很容易发生事故。
技术实现思路
1、本实用新型所要解决的主要技术问题是提供一种单驾驶位仿真动物骑行装置,具有主动刹车系统并进一步在底盘四周安装缓冲防撞装置,在车辆遇到行人或障碍物时能够主动进行刹车并进一步通过缓冲防撞装置的缓冲吸收保障行人和骑乘者的安全,并且具有多个驾驶位,可以多人同时进行互动骑行体验及集娱乐、健康为一体的新型游乐设备。
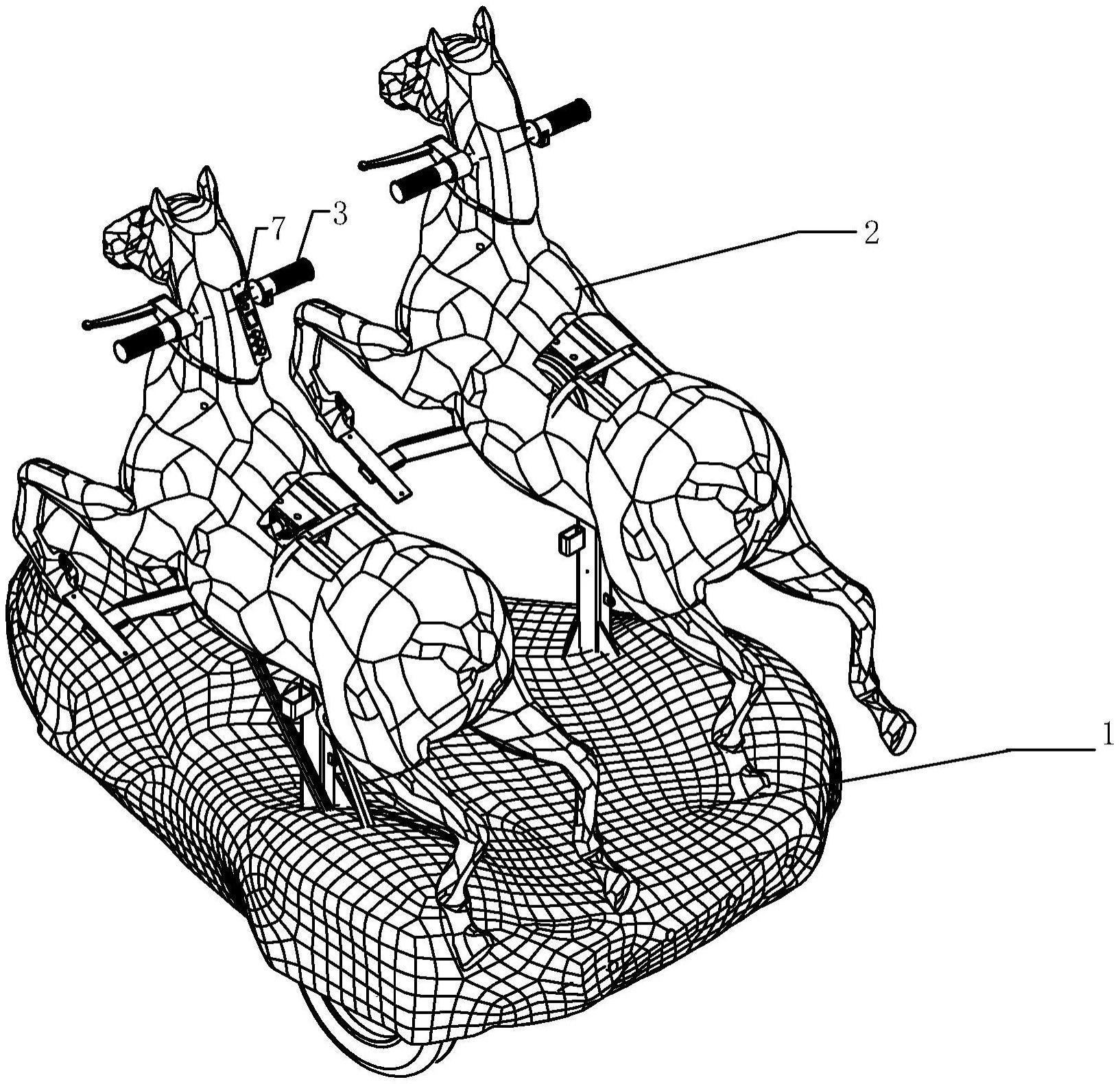
2、为了解决上述的技术问题,本实用新型提供了一种单驾驶位仿真动物骑行装置,包括底盘、行走机构、运动机构和一个置于底盘上的动物模型的驾驶位;所述动物模型和运动机构可以是一体,也可以是分开;所述动物模型受运动机构驱动进行动物模拟运动;所述行走机构安装于底盘以带动底盘行走;所述骑行装置在行进的过程中,动物模型模拟动物行走或跃进走动动作;所述动物模型的驾驶位上设置有方向控制装置;
3、还包括设置在底盘或与底盘同步运动的骑行装置上的感应装置,感应装置检测到骑行装置的行走方向上有障碍物并发送感应信号至主控模块,所述主控模块控制所述骑行装置减速,或者刹车,相应的动物模型同步减慢或停止与底盘相对运动。
4、在一较佳实施例中:还包括电机驱动机构,电机驱动机构与行走机构相联动;所述行走机构包括前轮机构和后轮机构。
5、在一较佳实施例中:所述运动机构由行走机构电机联动轮轴获取动力和/或由前轮机构和/或后轮机构与地面的摩擦力获取动力。
6、在一较佳实施例中:所述运动机构安装于底盘,立架安装于运动机构。
7、在一较佳实施例中:感应装置检测骑行装置与行走方向上障碍物和/或行人之间的距离小于s1时报警,所述s1=(0.2+v×a1)米,0≤a1≤6.3,v为骑行装置的速度;
8、感应装置检测骑行装置与行走方向上障碍物和/或行人之间的距离小于s2时刹车,所述s2=(0.2+v×a2)米,0≤a2≤3.2;
9、并且a1大于或等于a2。
10、在一较佳实施例中:还包括cpu主控系统;所述感应装置还包括第一组感应装置和第二组感应装置,所述cpu主控系统获取骑行装置的当前速度并与设定阈值比较,当速度小于设定阈值s3时,所述第一组感应装置输出有效信号;当速度大于设定阈值s4时,第一组感应装置和第二组感应装置同时输出有效信号。
11、在一较佳实施例中:还包括刹车控制模块,所述刹车控制模块包括第一组刹车控制模块和第二组刹车控制模块;
12、所述第一组感应装置输出有效信号时,第一组感应装置的感应距离小于设定阈值s5时,开启第一组刹车控制模块;
13、所述第一组感应装置和第二组感应装置同时输出有效信号时,第一组感应装置的感应距离小于设定阈值s6时开启第一组刹车控制模块;第二组感应装置的感应距离小于设定阈值s7时,同时开启第一组和第二组刹车控制模块。
14、在一较佳实施例中:所述底盘包括主架和底盘外壳;所述感应装置设置在底盘的前端和/或后端。
15、在一较佳实施例中:所述感应装置为超声波距离传感器、红外线距离传感器、激光位移传感器、光学式位移传感器、视觉位移传感器、微波距离传感器中的一种或两种及以上同时使用。
16、在一较佳实施例中:还包括至少1位乘坐位。
17、本实用新型提供了一种单驾驶位仿真动物骑行装置,包括:底盘、行走机构、运动机构和一个置于底盘上的动物模型的驾驶位;所述动物模型和运动机构可以是一体,也可以是分开;所述运动机构由第一电机驱动系统获取动力,使动物模型可做动物模拟运动;所述行走机构安装于底盘,由第二电机驱动系统获取动力以带动所述底盘行走;所述骑行装置在行进的过程中,动物模型模拟动物行走或跃进走动动作;所述动物模型的驾驶位上设置有方向控制装置;
18、所述第一电机驱动系统和第二电机驱动系统包括1个电机驱动或1个以上电机驱动。
19、还包括设置在底盘或与底盘同步运动的骑行装置上的感应装置,感应装置检测到骑行装置的行走方向上有障碍物并发送感应信号至主控芯片,所述主控芯片输出第一控制信号以控制所述骑行装置减速,或者刹车;并且所述主控芯片输出第二控制信号控制所述第一电机带动模拟运动机构保持当前频率或减慢或停止与底盘相对运动。
20、在一较佳实施例中:所述行走机构包括前轮机构和后轮机构;
21、在一较佳实施例中:所述运动机构安装于底盘,立架安装于运动机构。
22、在一较佳实施例中:感应装置检测骑行装置与行走方向上障碍物和/或行人之间的距离小于s1时报警,所述s1=(0.2+v×a1)米,0≤a1≤6.3,v为骑行装置的速度;
23、感应装置检测骑行装置与行走方向上障碍物和/或行人之间的距离小于s2时刹车,所述s2=(0.2+v×a2)米,0≤a2≤3.2;
24、并且a1大于或等于a2。
25、在一较佳实施例中:还包括cpu主控系统;所述感应装置还包括第一组感应装置和第二组感应装置,所述cpu主控系统获取骑行装置的当前速度并与设定阈值比较,当速度小于设定阈值s3时,所述第一组感应装置输出有效信号;当速度大于设定阈值s4时,第一组感应装置和第二组感应装置同时输出有效信号。
26、在一较佳实施例中:还包括刹车控制模块,所述刹车控制模块包括第一组刹车控制模块和第二组刹车控制模块;
27、所述第一组感应装置输出有效信号时,第一组感应装置的感应距离小于设定阈值s5时,开启第一组刹车控制模块;
28、所述第一组感应装置和第二组感应装置同时输出有效信号时,第一组感应装置的感应距离小于设定阈值s6时开启第一组刹车控制模块;第二组感应装置的感应距离小于设定阈值s7时,同时开启第一组和第二组刹车控制模块。
29、在一较佳实施例中:所述感应装置为超声波距离传感器、红外线距离传感器、激光位移传感器、光学式位移传感器、视觉位移传感器、微波距离传感器中的一种或两种及以上同时使用。
30、在一较佳实施例中:还包括至少1位乘坐位。
31、本发明还提供了一种多驾驶位仿真动物骑行装置,包括:底盘、行走机构、运动机构和一个置于底盘上的动物模型的驾驶位;所述动物模型和运动机构可以是一体,也可以是分开;所述动物模型受运动机构驱动进行动物模拟运动;所述行走机构安装于底盘以带动底盘行走;所述骑行装置在行进的过程中,动物模型模拟动物行走或跃进走动动作;所述动物模型的驾驶位上设置有方向控制装置;
32、还包括刹车装置,所述刹车装置刹车使所述行走机构减速,或者刹车,动物模型同步减慢或停止与底盘相对运动。
33、在一较佳实施例中:还包括固定在底盘四周的前、后、左、右中的一个或几个的缓冲防撞装置,所述缓冲防撞装置的缓冲吸收能量为e1焦耳,e1=1/2mv2,m为骑行装置及骑乘者的总质量,m=(80kg+a×40kg)+(a×100kg),a为动物模型的数量,v为骑行装置的速度,0≤v≤4千米/小时。
34、更具体的,所述一个置于底盘上的动物模型的驾驶位,当驾驶位为2个时,骑行装置及骑乘者的总质量m=(80kg+2×40kg)+(2×100kg)=360kg,骑行装置的速度4千米/小时,缓冲吸收能量为e1=1/2mv2=1/2×360kg×42=2880焦耳,根据算出的缓冲吸收能量2880焦耳,可合理选定缓冲材料和形式等,使骑行装置在速度v≤4千米/小时时,撞到行人或障碍物时能够有效的保障行人和骑乘者的安全;因此,可根据骑行装置的驾驶位和乘坐位的个数,在速度0≤v≤4千米/小时的范围内,设计合理有效的缓冲防撞装置,达到有效的保障行人和骑乘者的安全;
35、在一较佳实施例中:所述运动机构由第一电机驱动系统获取动力,使动物模型可做动物模拟运动;所述行走机构由第二电机驱动系统获取动力以带动所述底盘行走;
36、所述第一电机驱动系统和第二电机驱动系统包括1个电机驱动或1个以上电机驱动。
37、在一较佳实施例中:还包括电机驱动机构,电机驱动机构与行走机构相联动;所述行走机构包括前轮机构和后轮机构。
38、在一较佳实施例中:所述运动机构由电机驱动机构联动轮轴传动和/或前轮机构和/或后轮机构与地面的摩擦力获取动力。
39、在一较佳实施例中:所述运动机构安装于底盘,立架安装于运动机构。
40、在一较佳实施例中:还包括至少1位乘坐位。
41、相较于现有技术,本实用新型的技术方案具备以下有益效果:
42、1.本实用新型提供了一种单驾驶位仿真动物骑行装置,通过距离传感器感应装置检测骑行装置在运动方向上与行人或障碍物之间的距离,cpu通过检测值和阈值进行比较做出刹车或者不刹车的判断。整个过程无需人为介入,可以作为辅助刹车的手段与驾驶者刹车并存,增加了骑行装置的安全性,有效避免了因为驾驶者注意力不集中等原因造成刹车不及时的事故。并且距离传感器感应装置设置在底盘上,底盘在骑行装置行进的过程中不会随着驾驶位上下摆动,因此,可以保证刹车传感器距离计算的准确性,会因为随着驾驶位上下起伏而造成计算的误差,能够避免刹车系统出现误操作的情况。
43、2.本实用新型提供了一种单驾驶位仿真动物骑行装置,采用两组距离传感器感应装置,当车速较慢时只有一组距离传感器感应装置发挥作用,而车速比较快时则两组距离传感器感应装置都投入使用,确保在车速较快的时候能够及时发现路面上的各种情况。
44、3.本实用新型提供了一种单驾驶位仿真动物骑行装置,可以承载多个乘客,其中一个乘客掌控骑行装置的方向、油门和刹车。从而克服了现有骑行装置座位单一的情况,
45、4.本实用新型提供了一种单驾驶位仿真动物骑行装置,具有一个驾驶位和至少一个乘坐位,可供两人及以上同时进行互动骑行体验,给骑乘者带来了健身娱乐的效果,增进亲情、友情。
46、5.本实用新型提供了一种单驾驶位仿真动物骑行装置,在骑行装置减速,或者刹车,同步地动物模型停止与底盘相对运动。这是由于减速或刹车的时候,人会随惯性前顷,这样动物模型同步或更快地停止相对运动,减少二者的同步振幅,更为安全和舒适。
47、6.本实用新型提供了一种单驾驶位仿真动物骑行装置,根据骑行装置上的动物模型的驾驶位和乘坐位个数的总和,得出骑行装置及骑乘者的总质量,在骑行装置速度v=4千米/小时时算出缓冲防撞装置需要的缓冲吸收能量,根据需要的缓冲吸收能量,可合理选定缓冲材料和缓冲形式等,使骑行装置在速度v≤4千米/小时时撞到行人或障碍物时能够有效的保障行人和骑乘者的安全;
- 还没有人留言评论。精彩留言会获得点赞!