一种可变形成吊机的机器人玩具的制作方法
1.本实用新型涉及变形玩具领域,特别涉及一种可变形成吊机的机器人玩具。
背景技术:
2.随着社会的发展,越来越多的玩具进入到日常生活中,玩具极大地丰富了人们的生活,增加生活的乐趣,特别是对儿童,玩具可以开发儿童的大脑,尤其是可变形的玩具机器人越来越受儿童的喜爱。
3.但是,由于现在可变形的玩具机器人变形结构相对复杂,对于各部件之间变形配合所需精度较高,导致产品开发及造价成本较高,且当机器人因摔落导致部件形变时,容易导致后续机器人无法实现变形配合。
4.因而需一种可变形成吊机的机器人玩具对上述提出的问题进行改进。
技术实现要素:
5.针对上述现有技术存在的缺陷,本实用新型要解决的技术问题是:提供一种可变形成吊机的机器人玩具。
6.一种可变形成吊机的机器人玩具,包括:
7.主躯体,其前侧转动设置有箱体,所述箱体前侧与上侧之间连通开设有开口;
8.头部组件,其转动设置于开口内,并可相对箱体翻转外凸于开口上方或翻转容置于箱体内;
9.盖体,其转动设置于主躯体后侧,并可相对主躯体上下翻转;
10.左臂,其通过万向轴活动设置于主躯体一侧,在其一端设置有吊臂;
11.右臂,其通过万向轴活动设置于主躯体一侧,且其可相对主躯体翻转并折叠容置于盖体内腔。
12.在一种实施例中,所述头部组件包括头部以及转动设置于头部一侧的盖板,所述盖板一端转动设置于位于箱体前侧的开口内。
13.在一种实施例中,所述头部组件还包括设置于头部与盖板之间的安装座,所述安装座转动设置于头部下端且与盖板一端相铰接,在主躯体上端内凹有供与安装座嵌合配合的限位槽。
14.在一种实施例中,所述头部高度与安装座高度之和等于所述箱体内腔后侧与前侧的间距,以使头部折叠容置于箱体内腔时,所述盖板相对远离头部的一侧与箱体前侧呈平齐设置。
15.在一种实施例中,所述右臂包括转动设置于主躯体一侧的连接座,以及通过万向轴活动设置于连接座上的臂部。
16.在一种实施例中,所述左臂包括依次转动连接的连接臂一、连接臂二与连接臂三,所述连接臂一转动设置于主躯体上,所述连接臂一相对主躯体沿x轴摆动,所述连接臂二相对连接臂一沿z轴摆动,所述连接臂三相对连接臂二沿x轴摆动。
17.在一种实施例中,所述主躯体包括上下螺接配合的上壳与下壳,所述上壳与下壳之间位于主躯体一侧形成有供容置连接座的安装区,所述连接座转动设置于安装区,当左臂随连接座相对主躯体翻转并转动移至主躯体后侧时,所述连接座外侧面与所述主躯体外侧面呈平齐设置。
18.在一种实施例中,所述主躯体下端设有安装孔。
19.综上所述,本实用新型相对于现有技术其有益效果是:
20.本实用新型初始形态为半人型形态的机器人,当需要变形时,其机器人的右臂受力折叠翻转至主躯体的后侧,再通过位于主躯体后方的盖体翻转并罩合于右臂上,以实现右臂的隐藏,且罩合后的盖体形成位于主躯体后方的引擎盖,而头部组件可相对翻转折叠于位于主躯体前侧的箱体内,再通过箱体相对主躯体翻转180
°
,以使箱体上开口呈朝下设置,进而以实现头部组件的隐藏,且箱体形成位于主躯体前侧的操控室,再通过结合位于左臂一端的吊臂,以使其整体形成吊机形态,从而实现半人型形态的机器人变形成吊机形态,增加变形玩具趣味性的同时,且右臂的变形只需折叠翻转并通过盖体罩合隐藏,头部组件的变形只需翻转折叠于箱体内并通过箱体转动隐藏,以简化变形结构,避免了复杂的变形结构容易因局部部件受力形变而导致后续无法变形配合的问题。
附图说明
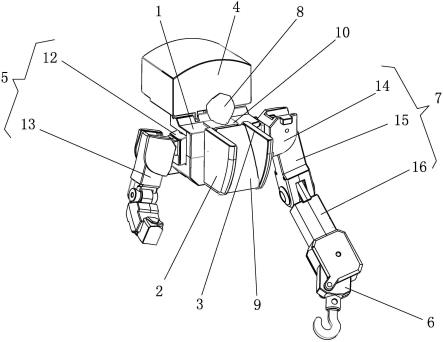
21.图1为本实用新型一个实施例中一种可变形成吊机的机器人玩具的半人型机器人形态立体结构示意图;
22.图2为本实用新型一个实施例中一种可变形成吊机的机器人玩具的吊机形态立体结构示意图;
23.图3为本实用新型一个实施例中一种可变形成吊机的机器人玩具的吊机形态爆炸示意图。
具体实施方式
24.下面结合附图说明和具体实施方式对本实用新型作进一步描述:
25.如图1至3所出示的,本实用新型的实施例较佳地提供一种可变形成吊机的机器人玩具,包括:主躯体1,其前侧转动设置有箱体2,所述箱体2前侧与上侧之间连通开设有开口3;头部组件,其转动设置于开口3内,并可相对箱体2翻转外凸于开口3上方或翻转容置于箱体2内;盖体4,其转动设置于主躯体1后侧,并可相对主躯体1上下翻转;左臂7,其通过万向轴活动设置于主躯体1一侧,在其一端设置有吊臂6;右臂5,其通过万向轴活动设置于主躯体1一侧,且其可相对主躯体1翻转并折叠容置于盖体4内腔。
26.具体的,本实用新型初始形态为半人型形态的机器人,当需要变形时,其机器人的右臂受力折叠翻转至主躯体的后侧,再通过位于主躯体后方的盖体翻转并罩合于右臂上,以实现右臂的隐藏,且罩合后的盖体形成位于主躯体后方的引擎盖,而头部组件可相对翻转折叠于位于主躯体前侧的箱体内,再通过箱体相对主躯体翻转180
°
,以使箱体上开口呈朝下设置,进而以实现头部组件的隐藏,且箱体形成位于主躯体前侧的操控室,再通过结合位于左臂一端的吊臂,以使其整体形成吊机形态,从而实现半人型形态的机器人变形成吊机形态,增加变形玩具趣味性的同时,且右臂的变形只需折叠翻转并通过盖体罩合隐藏,头
部组件的变形只需翻转折叠于箱体内并通过箱体转动隐藏,以简化变形结构,避免了复杂的变形结构容易因局部部件受力形变而导致后续无法变形配合的问题。
27.所述头部组件包括头部8以及转动设置于头部8一侧的盖板9,所述盖板9一端转动设置于位于箱体2前侧的开口3内。具体的,如图1所出示的,当盖板向箱体内侧翻转时,头部相对盖板向上翻转并外凸抵持于主躯体上端,如图2至3所出示的,当盖板向箱体外侧翻转并与箱体两侧外表面平齐时,头部相对盖板翻转折叠于箱体内,并驱使箱体相对主躯体翻转180
°
,达到隐藏头部的效果。
28.进一步地,所述头部组件还包括设置于头部8与盖板9之间的安装座10,所述安装座10转动设置于头部8下端且与盖板9一端相铰接,在主躯体1上端内凹有供与安装座10嵌合配合的限位槽11。具体的,当头部相对盖板向上翻转并外凸抵持于主躯体上端时,头部下方的安装座嵌合于主躯体上的限位槽内,进而以实现盖板和头部的限位固定,且头部可相对安装座水平旋转,增加变形玩具的趣味性。
29.进一步地,所述头部8高度与安装座10高度之和等于所述箱体2内腔后侧与前侧的间距,以使头部8折叠容置于箱体2内腔时,所述盖板9相对远离头部8的一侧与箱体2前侧呈平齐设置。
30.如图1至3所出示的,所述右臂5包括转动设置于主躯体1一侧的连接座12,以及通过万向轴活动设置于连接座12上的臂部13。具体的,臂部随连接座相对主躯体后侧水平翻转90
°
,再通过臂部相对连接座翻转并使其一侧紧贴于主躯体后侧,以实现盖体相对主躯体向下翻转罩合右臂。
31.进一步地,所述左臂7包括依次转动连接的连接臂一14、连接臂二15与连接臂三16,所述连接臂一14转动设置于主躯体1上,所述连接臂一14相对主躯体1沿x轴摆动,所述连接臂二15相对连接臂一14沿z轴摆动,所述连接臂三16相对连接臂二15沿x轴摆动。具体的,通过多段连接臂可转动连接,以增加吊臂多方向移动的趣味性。
32.进一步地,所述主躯体1包括上下螺接配合的上壳17与下壳18,所述上壳17与下壳18之间位于主躯体1一侧形成有供容置连接座12的安装区,所述连接座12转动设置于安装区,当左臂7随连接座12相对主躯体1翻转并转动移至主躯体1后侧时,所述连接座12外侧面与所述主躯体1外侧面呈平齐设置。
33.进一步地,所述主躯体1下端设有安装孔19。具体的,主躯体可通过安装孔与其它外置机器人的部件连接配合。
34.以上显示和描述了本实用新型的基本原理和主要特征以及本实用新型的优点,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1